
无人机开发环境搭建
linux开发环境搭建
需要需要同时使用Windows和Linux的开发软件,因此双系统方案并不能满足我的需求,因此决定使用WSL2方案。
安装WSL2
略,跟着网上的教程安装WSL2,需要打开虚拟化选项。
下载合适的Linux发行版
本节内容参考该博客
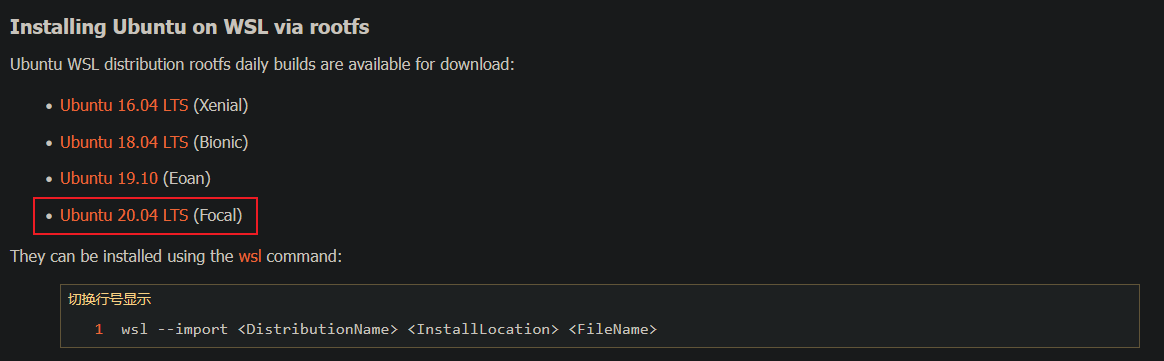
本次实验选择使用 Ubuntu 20.04 LTS,使用 rootfs方式,首先需要下载镜像:
- 进入WSL-Ubuntu的Wiki页
![img]()
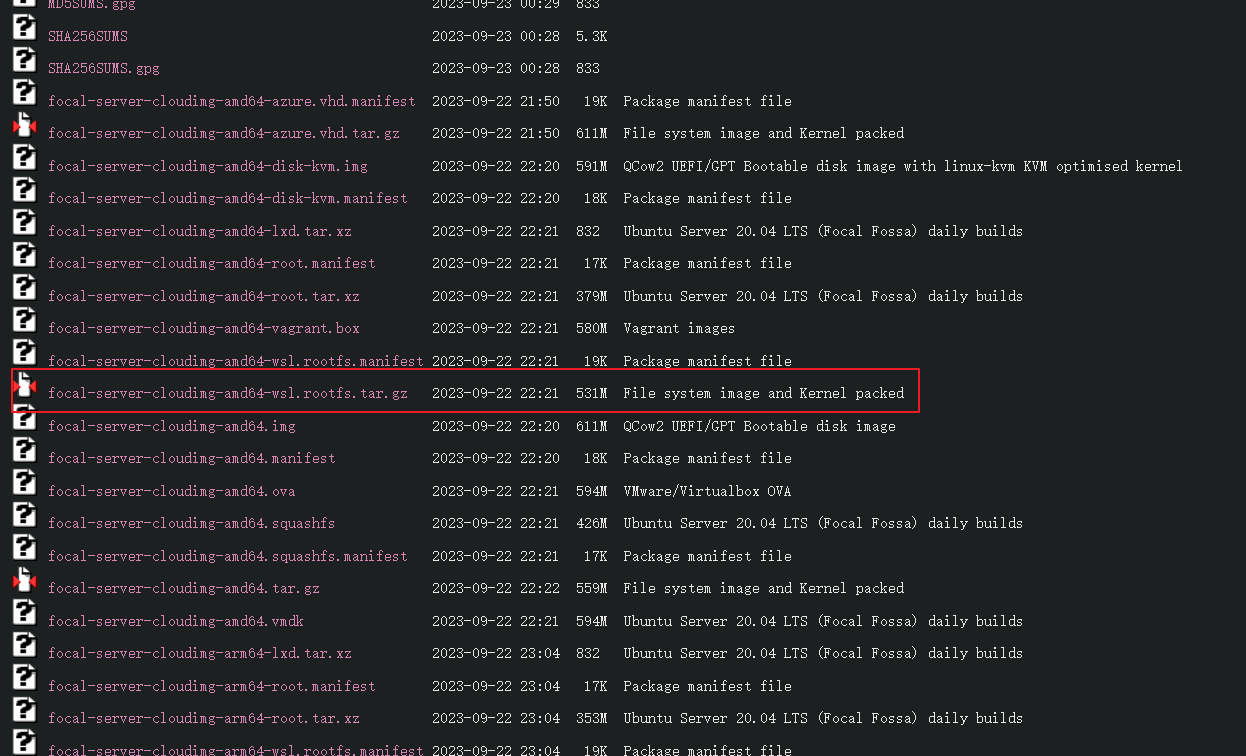
- 选择对应版本,下载
*-server-cloudimg-amd64-wsl.rootfs.tar.gz,*取决于你需要下载的发行版,我这次下载20.04版本focal-server-cloudimg-amd64-wsl.rootfs.tar.gz
![img]()
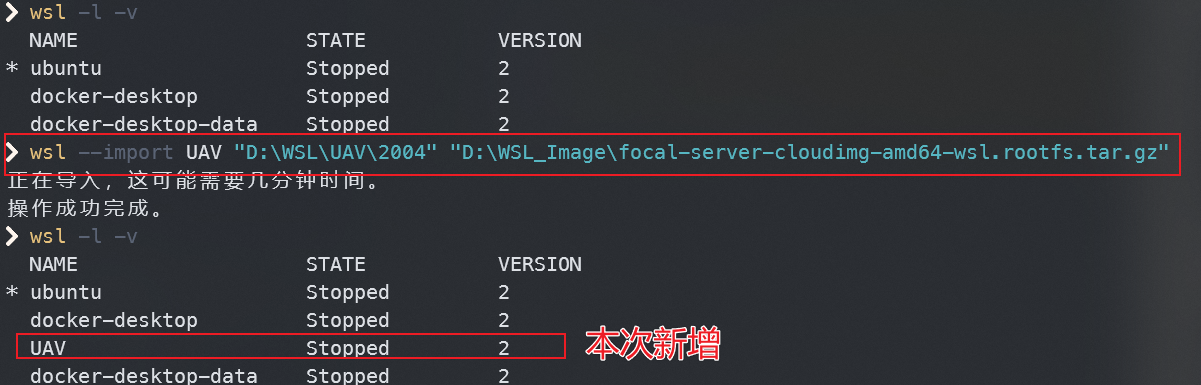
- 通过命令行进行安装,命令使用格式为
wsl --import <DistributionName> <InstallLocation> <FileName>
![img]()
更换Ubuntu软件源为国内源
用到的链接:
Ubuntu 软件仓库镜像使用帮助

可以将以下内容写入脚本执行,或逐行执行:
#!/bin/bash
# 注意:以下命令均需要root权限,默认执行用户为root
# 备份系统原来的软件源文件
cp /etc/apt/sources.list /etc/apt/sources.list.bak
# 清空sources.list
echo > /etc/apt/sources.list
# 添加清华源
echo "# 默认注释了源码镜像以提高 apt update 速度,如有需要可自行取消注释" >> /etc/apt/sources.list
echo "deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal main restricted universe multiverse" >> /etc/apt/sources.list
echo "# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal main restricted universe multiverse" >> /etc/apt/sources.list
echo "deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-updates main restricted universe multiverse" >> /etc/apt/sources.list
echo "# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-updates main restricted universe multiverse" >> /etc/apt/sources.list
echo "deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-backports main restricted universe multiverse" >> /etc/apt/sources.list
echo "# deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-backports main restricted universe multiverse" >> /etc/apt/sources.list
echo "# deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-security main restricted universe multiverse" >> /etc/apt/sources.list
echo "# # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-security main restricted universe multiverse" >> /etc/apt/sources.list
echo "deb http://security.ubuntu.com/ubuntu/ focal-security main restricted universe multiverse" >> /etc/apt/sources.list
echo "# deb-src http://security.ubuntu.com/ubuntu/ focal-security main restricted universe multiverse" >> /etc/apt/sources.list
echo "# 预发布软件源,不建议启用" >> /etc/apt/sources.list
echo "# deb https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-proposed main restricted universe multiverse" >> /etc/apt/sources.list
echo "# # deb-src https://mirrors.tuna.tsinghua.edu.cn/ubuntu/ focal-proposed main restricted universe multiverse" >> /etc/apt/sources.list
# 更新源
apt update
ROS相关
安装ROS
使用鱼香ROS的一键安装脚本
wget http://fishros.com/install -O fishros && . fishros
安装按照命令提示即可,主要涉及软件园修改,ROS版本选择,基于Ubuntu发行版20.04,ROS版本选择ROS1的 noetic。
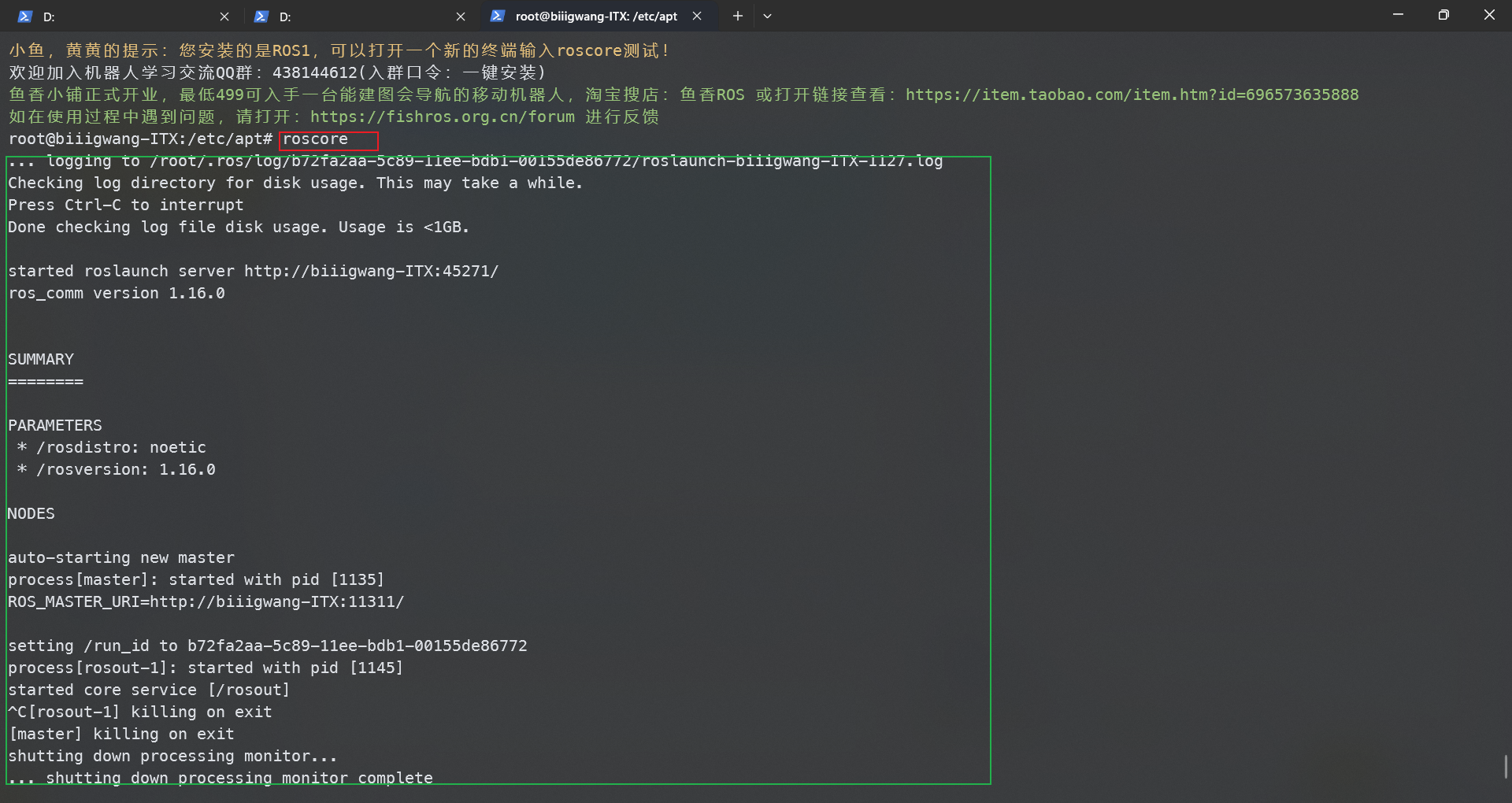
安装验证
安装ROS1成功后运行roscore,可到到类似下图的结果
运行小乌龟
- 运行虚拟环境:
# 新建终端执行,运行小乌龟虚拟环境
rosrun turtlesim turtlesim_node
- 运行控制器
# 新建终端执行,运行小乌龟控制器
rosrun turtlesim turtle_teleop_key


 浙公网安备 33010602011771号
浙公网安备 33010602011771号