
数据结构(三十六)关键路径
一、关键路径的定义
拓扑排序主要为了解决一个工程能否顺序进行的问题,但有时候还需要解决工程完成需要的最短时间问题。
1.AOE网:在一个表示工程的带权有向图中,用顶点表示时间,用有向边表示活动,用边上的权值表示活动的持续时间,这种有向图的边表示活动的网,称为AOE网(Activity On Edge Network)。把AOE网中没有入边的顶点称为始点或源点,没有出边的顶点称为终点或汇点。正常情况下,AOE网只有一个源点一个汇点。
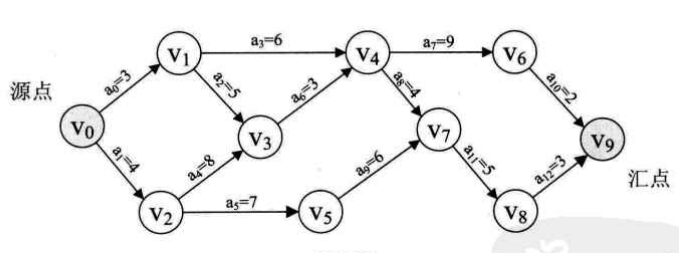 弧<v0,v1>表示从源点开始的第一个活动a0,它的时间单位是3个单位。
弧<v0,v1>表示从源点开始的第一个活动a0,它的时间单位是3个单位。
2.关键路径:把路径上各个活动所持续时间之和称为路径长度,从源点到汇点具有最大长度的路径叫关键路径,在关键路径上的活动叫关键活动。
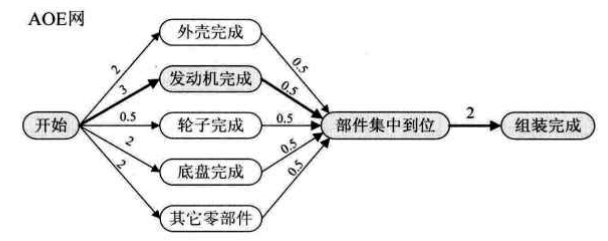 关键路径为:开始-发动机完成-部件集中到位-组装完成。路径长度为3+0.5+2=5.5小时
关键路径为:开始-发动机完成-部件集中到位-组装完成。路径长度为3+0.5+2=5.5小时
二、关键路径算法
1.为了找到所有活动的最早开始时间和最晚开始时间,并且比较它们,如果相等就意味着此活动是关键活动,活动间的路径为关键路径。因此需要定义几个参数:
- 事件的最早发生时间etv(earliest time of vertex):即顶点Vk的最早发生时间。
- 事件的最晚发生时间ltv(lastest time of vertex):即顶点Vk的最晚发生时间,也就是每个顶点对应的事件最晚需要开始的时间,超出此时间将会延误整个工期。
- 活动的最早开工时间ete(earliest time of edge):即弧Ak的最早发生时间。
- 活动的最晚开工时间lte(lastest time of edge):即弧Ak的最晚发生时间,也就是不推迟工期的最晚开工时间。
由etv和ltv可以求得ete和lte,然后再根据ete和lte是否相等来判断ak是否是关键活动。
2.关键路径算法的思路
假设V0为源点,时间V0发生的时刻为0时刻,从V0到Vi的最长路径叫做事件Vi的最早发生时间,这个时间决定以所有以Vi为尾的弧所表示活动的最早开始时间。用etv(i)表示活动ai的最早开始时间。还可以定义一个活动ai的最晚开始时间ltv(i),这是在不推迟整个工程完成的前提下,活动ai最迟必须开始的时间。两者之差意味着完成活动ai的时间余量。当etv(i)=ltv(i)时的活动成为关键活动。由于关键路径上的活动都是关键活动,所以,提前完成非关键活动并不能加快工程的进度。
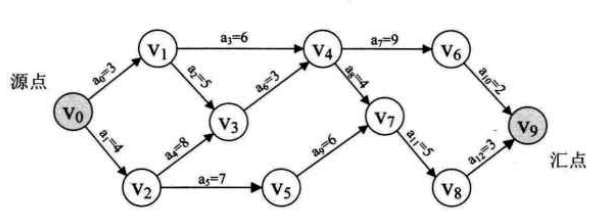
例如,上图所示的AOE网的关键路径为:v0->v2->v3->v4->v7->v8->v9
因为事件a5的最早开始时间为4,而v0-v2-v3-v7的总时间为4+8+3+7=22,所以时间a5的最晚开始时间为22-4-6-7=5,即若a5延迟1小时,不会影响整个工程的完成。所以说a5不是关键活动。
3.关键路径算法C语言代码实现


#include "stdio.h" #include "stdlib.h" #include "io.h" #include "math.h" #include "time.h" #define OK 1 #define ERROR 0 #define TRUE 1 #define FALSE 0 #define MAXEDGE 30 #define MAXVEX 30 #define INFINITY 65535 typedef int Status; /* Status是函数的类型,其值是函数结果状态代码,如OK等 */ int *etv,*ltv; /* 事件最早发生时间和最迟发生时间数组,全局变量 */ int *stack2; /* 用于存储拓扑序列的栈 */ int top2; /* 用于stack2的指针 */ /* 邻接矩阵结构 */ typedef struct { int vexs[MAXVEX]; int arc[MAXVEX][MAXVEX]; int numVertexes, numEdges; }MGraph; /* 邻接表结构****************** */ typedef struct EdgeNode /* 边表结点 */ { int adjvex; /* 邻接点域,存储该顶点对应的下标 */ int weight; /* 用于存储权值,对于非网图可以不需要 */ struct EdgeNode *next; /* 链域,指向下一个邻接点 */ }EdgeNode; typedef struct VertexNode /* 顶点表结点 */ { int in; /* 顶点入度 */ int data; /* 顶点域,存储顶点信息 */ EdgeNode *firstedge;/* 边表头指针 */ }VertexNode, AdjList[MAXVEX]; typedef struct { AdjList adjList; int numVertexes,numEdges; /* 图中当前顶点数和边数 */ }graphAdjList,*GraphAdjList; /* **************************** */ void CreateMGraph(MGraph *G)/* 构件图 */ { int i, j; /* printf("请输入边数和顶点数:"); */ G->numEdges=13; G->numVertexes=10; for (i = 0; i < G->numVertexes; i++)/* 初始化图 */ { G->vexs[i]=i; } for (i = 0; i < G->numVertexes; i++)/* 初始化图 */ { for ( j = 0; j < G->numVertexes; j++) { if (i==j) G->arc[i][j]=0; else G->arc[i][j]=INFINITY; } } G->arc[0][1]=3; G->arc[0][2]=4; G->arc[1][3]=5; G->arc[1][4]=6; G->arc[2][3]=8; G->arc[2][5]=7; G->arc[3][4]=3; G->arc[4][6]=9; G->arc[4][7]=4; G->arc[5][7]=6; G->arc[6][9]=2; G->arc[7][8]=5; G->arc[8][9]=3; } /* 利用邻接矩阵构建邻接表 */ void CreateALGraph(MGraph G,GraphAdjList *GL) { int i,j; EdgeNode *e; *GL = (GraphAdjList)malloc(sizeof(graphAdjList)); (*GL)->numVertexes=G.numVertexes; (*GL)->numEdges=G.numEdges; for(i= 0;i <G.numVertexes;i++) /* 读入顶点信息,建立顶点表 */ { (*GL)->adjList[i].in=0; (*GL)->adjList[i].data=G.vexs[i]; (*GL)->adjList[i].firstedge=NULL; /* 将边表置为空表 */ } for(i=0;i<G.numVertexes;i++) /* 建立边表 */ { for(j=0;j<G.numVertexes;j++) { if (G.arc[i][j]!=0 && G.arc[i][j]<INFINITY) { e=(EdgeNode *)malloc(sizeof(EdgeNode)); e->adjvex=j; /* 邻接序号为j */ e->weight=G.arc[i][j]; e->next=(*GL)->adjList[i].firstedge; /* 将当前顶点上的指向的结点指针赋值给e */ (*GL)->adjList[i].firstedge=e; /* 将当前顶点的指针指向e */ (*GL)->adjList[j].in++; } } } } /* 拓扑排序 */ Status TopologicalSort(GraphAdjList GL) { /* 若GL无回路,则输出拓扑排序序列并返回1,若有回路返回0。 */ EdgeNode *e; int i,k,gettop; int top=0; /* 用于栈指针下标 */ int count=0;/* 用于统计输出顶点的个数 */ int *stack; /* 建栈将入度为0的顶点入栈 */ stack=(int *)malloc(GL->numVertexes * sizeof(int) ); for(i = 0; i<GL->numVertexes; i++) if(0 == GL->adjList[i].in) /* 将入度为0的顶点入栈 */ stack[++top]=i; top2=0; etv=(int *)malloc(GL->numVertexes * sizeof(int) ); /* 事件最早发生时间数组 */ for(i=0; i<GL->numVertexes; i++) etv[i]=0; /* 初始化 */ stack2=(int *)malloc(GL->numVertexes * sizeof(int) );/* 初始化拓扑序列栈 */ printf("TopologicalSort:\t"); while(top!=0) { gettop=stack[top--]; printf("%d -> ",GL->adjList[gettop].data); count++; /* 输出i号顶点,并计数 */ stack2[++top2]=gettop; /* 将弹出的顶点序号压入拓扑序列的栈 */ for(e = GL->adjList[gettop].firstedge; e; e = e->next) { k=e->adjvex; if( !(--GL->adjList[k].in) ) /* 将i号顶点的邻接点的入度减1,如果减1后为0,则入栈 */ stack[++top]=k; if((etv[gettop] + e->weight)>etv[k]) /* 求各顶点事件的最早发生时间etv值 */ etv[k] = etv[gettop] + e->weight; } } printf("\n"); if(count < GL->numVertexes) return ERROR; else return OK; } /* 求关键路径,GL为有向网,输出G的各项关键活动 */ void CriticalPath(GraphAdjList GL) { EdgeNode *e; int i,gettop,k,j; int ete,lte; /* 声明活动最早发生时间和最迟发生时间变量 */ TopologicalSort(GL); /* 求拓扑序列,计算数组etv和stack2的值 */ ltv=(int *)malloc(GL->numVertexes*sizeof(int));/* 事件最早发生时间数组 */ for(i=0; i<GL->numVertexes; i++) ltv[i]=etv[GL->numVertexes-1]; /* 初始化 */ printf("etv:\t"); for(i=0; i<GL->numVertexes; i++) printf("%d -> ",etv[i]); printf("\n"); while(top2!=0) /* 出栈是求ltv */ { gettop=stack2[top2--]; for(e = GL->adjList[gettop].firstedge; e; e = e->next) /* 求各顶点事件的最迟发生时间ltv值 */ { k=e->adjvex; if(ltv[k] - e->weight < ltv[gettop]) ltv[gettop] = ltv[k] - e->weight; } } printf("ltv:\t"); for(i=0; i<GL->numVertexes; i++) printf("%d -> ",ltv[i]); printf("\n"); for(j=0; j<GL->numVertexes; j++) /* 求ete,lte和关键活动 */ { for(e = GL->adjList[j].firstedge; e; e = e->next) { k=e->adjvex; ete = etv[j]; /* 活动最早发生时间 */ lte = ltv[k] - e->weight; /* 活动最迟发生时间 */ if(ete == lte) /* 两者相等即在关键路径上 */ printf("<v%d - v%d> length: %d \n",GL->adjList[j].data,GL->adjList[k].data,e->weight); } } } int main(void) { MGraph G; GraphAdjList GL; CreateMGraph(&G); CreateALGraph(G,&GL); CriticalPath(GL); return 0; }
4.关键路径算法Java语言代码实现
(1)和拓扑排序时邻接表的边结点结构不同的是,关键路径算法时要用到每个边上时间ak的时间,因此需要在边结点结构中增加一个weight域来表示事件需要的时间。
package bigjun.iplab.criticalPath; /** * 用于关键路径算法中的邻接表存储结构中的边(或弧)结点类 */ public class EdgeNode { public int adjVex; // 该弧所指向的顶点在顶点数组中的下标 public int weight; // 用于表示事件完成需要的时间 public EdgeNode nextEdge; // 指向下一条表示边或弧的结点类 public EdgeNode(int adjVex, int weight) { this(adjVex, weight, null); } public EdgeNode(int adjVex, int weight, EdgeNode nextEdge) { this.adjVex = adjVex; this.weight = weight; this.nextEdge = nextEdge; } }
(2)实现类:
package bigjun.iplab.criticalPath; import bigjun.iplab.linkStack.LinkStack; public class TheCriticalPath { private static LinkStack T = new LinkStack(); // 拓扑逆序列顶点栈 private static int[] etv, ltv; // 各顶点的最早发生时间和最晚发生时间 public static void CriticalPath(ActivityOnEdgeNetwork G) throws Exception { if (!topologicalOrder(G)) throw new Exception("给定的AOE网是一个带回环的网图,不能找到关键路径!"); ltv = new int[G.getVexNum()]; for (int i = 0; i < G.getVexNum(); i++) { ltv[i] = etv[G.getVexNum() - 1]; } while (!T.isStackEmpty()) { int i = (int) T.stackPop(); for (EdgeNode edge = G.getVexs()[i].firstEdge; edge != null; edge = edge.nextEdge) { int k = edge.adjVex; int time = edge.weight; if (ltv[k] - time < ltv[i]) ltv[i] = ltv[k] - time; } } for (int i = 0; i < G.getVexNum(); i++) { for (EdgeNode edge = G.getVexs()[i].firstEdge; edge != null; edge = edge.nextEdge) { int k = edge.adjVex; int time = edge.weight; int ete = etv[i]; int lte = ltv[k] - time; char tag = (ete==lte)? 'Y':'N'; System.out.println(G.getVex(i) + "->" + G.getVex(k) + " " + "活动持续的时间: " + time + " " + "最早开始时刻: " + ete + " " + "最晚开始时刻: "+ lte + " " + "是否是关键路径 : " + tag); } } } // 使用拓扑排序求事件的最早发生时间etv,以及将拓扑序列存入全局变量栈T中 private static boolean topologicalOrder(ActivityOnEdgeNetwork G) throws Exception { int count = 0; // 统计输出顶点的个数 LinkStack S = new LinkStack(); for (int i = 0; i < G.getVexNum(); i++) { // 将入度为0的顶点入栈 if (G.getVexs()[i].in == 0) { S.stackPush(i); } } etv = new int[G.getVexNum()]; while (!S.isStackEmpty()) { int i = (int) S.stackPop(); T.stackPush(i); count++; // 遍历顶点Vi的边链表,将每一个弧头对应的顶点的入度减1,也就是把Vi和连接自己的弧断开 for (EdgeNode edge = G.getVexs()[i].firstEdge; edge != null; edge = edge.nextEdge) { int k = edge.adjVex; if (--G.vexs[k].in == 0) { S.stackPush(k); } if (etv[i] + edge.weight > etv[k]) etv[k] = etv[i] + edge.weight; } } if (count < G.getVexNum()) return false; // 如果遍历完后count值小于总的顶点数,就说明该有向图有回路,即拓扑排序的过程中又绕回去了 else return true; } }
(3)测试代码(以下面的AOE网为例):

public static ActivityOnEdgeNetwork createDN_ForTheCriticalPath() { EdgeNode e_0_1 = new EdgeNode(1, 3); EdgeNode e_0_2 = new EdgeNode(2, 4, e_0_1); VertexNode v0 = new VertexNode(0, "V0", e_0_2); EdgeNode e_1_3 = new EdgeNode(3, 5); EdgeNode e_1_4 = new EdgeNode(4, 6, e_1_3); VertexNode v1 = new VertexNode(1, "V1", e_1_4); EdgeNode e_2_3 = new EdgeNode(3, 8); EdgeNode e_2_5 = new EdgeNode(5, 7, e_2_3); VertexNode v2 = new VertexNode(1, "V2", e_2_5); EdgeNode e_3_4 = new EdgeNode(4, 3); VertexNode v3 = new VertexNode(2, "V3", e_3_4); EdgeNode e_4_6 = new EdgeNode(6, 9); EdgeNode e_4_7 = new EdgeNode(7, 4, e_4_6); VertexNode v4 = new VertexNode(2, "V4", e_4_7); EdgeNode e_5_7 = new EdgeNode(7, 6); VertexNode v5 = new VertexNode(1, "V5", e_5_7); EdgeNode e_6_9 = new EdgeNode(9, 2); VertexNode v6 = new VertexNode(1, "V6", e_6_9); EdgeNode e_7_8 = new EdgeNode(8, 5); VertexNode v7 = new VertexNode(2, "V7", e_7_8); EdgeNode e_8_9 = new EdgeNode(9, 3); VertexNode v8 = new VertexNode(1, "V8", e_8_9); VertexNode v9 = new VertexNode(2, "V9"); VertexNode[] vexs = {v0,v1,v2,v3,v4,v5,v6,v7,v8,v9}; int vertexNum = vexs.length; int edgeNum = 13; return new ActivityOnEdgeNetwork(vertexNum, edgeNum, vexs); } public static void main(String[] args) throws Exception { ActivityOnEdgeNetwork DN_ForCriticalPath = createDN_ForTheCriticalPath(); TheCriticalPath.CriticalPath(DN_ForCriticalPath); }
(4)输出
V0->V2 活动持续的时间: 4 最早开始时刻: 0 最晚开始时刻: 0 是否是关键路径 : Y V0->V1 活动持续的时间: 3 最早开始时刻: 0 最晚开始时刻: 4 是否是关键路径 : N V1->V4 活动持续的时间: 6 最早开始时刻: 3 最晚开始时刻: 9 是否是关键路径 : N V1->V3 活动持续的时间: 5 最早开始时刻: 3 最晚开始时刻: 7 是否是关键路径 : N V2->V5 活动持续的时间: 7 最早开始时刻: 4 最晚开始时刻: 6 是否是关键路径 : N V2->V3 活动持续的时间: 8 最早开始时刻: 4 最晚开始时刻: 4 是否是关键路径 : Y V3->V4 活动持续的时间: 3 最早开始时刻: 12 最晚开始时刻: 12 是否是关键路径 : Y V4->V7 活动持续的时间: 4 最早开始时刻: 15 最晚开始时刻: 15 是否是关键路径 : Y V4->V6 活动持续的时间: 9 最早开始时刻: 15 最晚开始时刻: 16 是否是关键路径 : N V5->V7 活动持续的时间: 6 最早开始时刻: 11 最晚开始时刻: 13 是否是关键路径 : N V6->V9 活动持续的时间: 2 最早开始时刻: 24 最晚开始时刻: 25 是否是关键路径 : N V7->V8 活动持续的时间: 5 最早开始时刻: 19 最晚开始时刻: 19 是否是关键路径 : Y V8->V9 活动持续的时间: 3 最早开始时刻: 24 最晚开始时刻: 24 是否是关键路径 : Y
(5)以实例分析代码执行过程
初始化,入度为0的顶点v0入栈S,
栈S不为空,将顶点v0从S中出栈,i=0,将0入栈到T中,count=1,进入for循环,k=2,v2的入度减1到0,v2入栈S,etv[2]+e02的权值4=4,etv[2]=0,etv[2]=4,即顶点v2最早发生时刻为4
栈S不为空,将顶点v2从S中出栈,i=2,将2入栈到T中,count=2,进入for循环,k=5,v5的入度减1到0,v5入栈S,etv[2]+e25=4+7=11,etv[5]=0,则etv[5]=11,
...同理,要求etv[3]的话,也就是v3最早发生时刻,只要比较etv[1]+a2和etv[2]+a4这两个中哪个大就行了,因为etv[1]和etv[2]分别是v0到v1和v2的最早时刻。从而etv[3]=13
最后得到etv[]={0,3,4,12,15,11,25,19,24,27}即各个顶点的最早发生时刻,T中:(top)9 8 7 5 6 4 3 2 1 0是拓扑排序的逆序
然后进入关键路径主函数:初始化ltv[]={27,27,27,27,27,27,27,27,27,27}即为etv中的最大值
-T不为空,9出栈i=9,没有邻接表,跳出
-T不为空,8出栈i=8,k=9,time=3,ltv[9]-3=27-3=24,ltv[8]=27,则ltv[8]=24,即v8的最晚发生时刻是24
-T不为空,7出栈i=7,k=8,time=5,ltv[8]-5=24-5=19,ltv[7]=27,则ltv[7]=19,即v7的最晚发生时刻是19
-T不为空,5出栈i=5,k=7,time=6,ltv[7]-6=19-6=13,ltv[5]=27,则ltv[5]=13,即v5的最晚发生时刻是13
-T不为空,6出栈i=6,k=9,time=2,ltv[9]-2=27-2=15,ltv[6]=27,则ltv[6]=25,即v8的最晚发生时刻是25
此时,ltv[] ={27,27,27,27,27,13,25,19,24,27}
-T不为空,4出栈i=4,k=7,time=4,ltv[7]-4=19-4=15,ltv[4]=27,则ltv[4]=15,则v4的最晚发生时刻是
k=6,time=9,ltv[6]-9=25-9=16,ltv[4]=15,则ltv[4]仍然等于15,则v4的最晚发生时刻是15
这里可以很清楚的看到,由于v6最晚开始时刻是25,而v7最晚开始时刻是19,所以v4走v6和v7的时候最晚发生时刻分别为:15,16所以v4最晚都要在15时刻开始发生, 如果16才发生的话,就到v7晚了,
所以说ltv[k]=min{ltv[j] - len<vk,vj>,其中j就是以vk为弧尾的弧的弧头顶点下标}
最后得到
etv[]={0,3,4,12,15,11,25,19,24,27}
ltv[]={0,7,4,12,15,13,25,19,24,27}可以看到v1表示的事件即使在7时刻才发生,也不会影响整个工程的进度。
ete表示<i,k>活动的最早开工时间,也就是只有vi事件发生了,活动才可以开始,因此ete=etv[i]
而lte表示<vi,vk>的最晚开工时间,但此活动再晚也不能等待vk事件发生了才发生,所以必须要在vk事件发生前发生,所以lte=ltv[k]-len<vi,vk>
最后,通过比较ete和lte来判断弧<i,k>对应的路径是不是关键路径。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号