已知 [目标速度] 、 [加速时间] 和 [加加速度(Jerk)],求运动过程的最大加速度
一、问题引入 : 关于加加速度(Jerk)
理想情况下,让一个物体从静止运动起来时,在已知 [目标速度](V) 和 [加速时间](t) 的情况下,我们可以轻易地根据以下公式算出这个运动过程的加速度(a)
加速度计算公式:
(1) 
所以,让静止物体在 [加速时间](t) 下达到 [目标速度](V) 的加速度为
(2) 
然而,实际上现实生活中的运动,比如让机床机械轴动起来,不可能一下子瞬间就达到一个恒定的加速度,加速度是一直变化逐渐增加的到目标最大加速度的,显然我们无法直接使用公式 (2) 来准确描述这个运动过程的加速度。
在实际应用的场景中,我们需要一个更准确的运动描述模型,那就是加加速度(Jerk)
在运动控制领域,加加速度(Jerk) 是个很重要的概念,以下 倍福(Beckhoff) TwinCAT 提供的软件界面,可以提供给我们一个它的作用的参考:
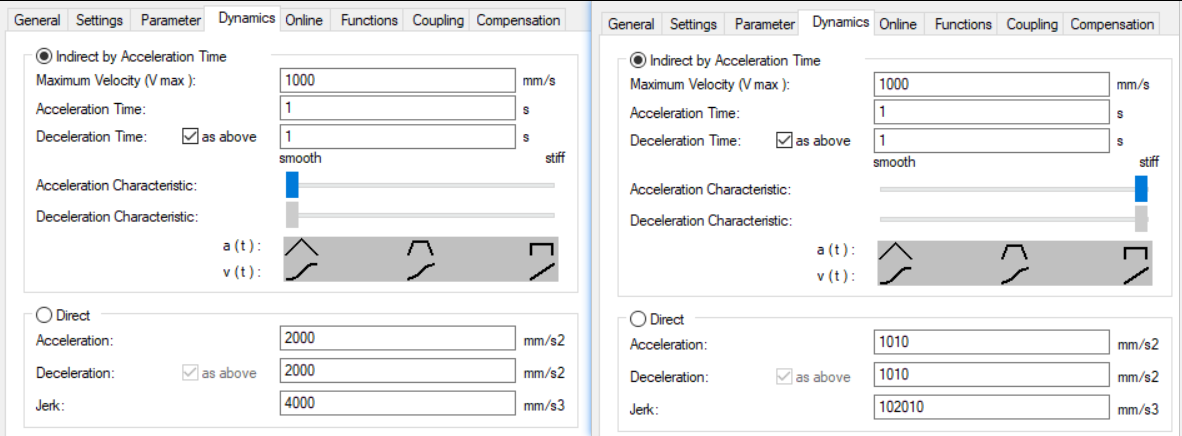
图一 倍福 TwinCAT System manager 轴参数设置页面
图中, Maxinum Velocity (V max) 为目标速度 V,
Acceleration Time 为整个过程加速所用的时间 t,
通过调整 Acceleration Characteristic 加速度特征 滑块,可以调整 加加速度(Jerk) ,
并得到运动过程对应的最大加速度 (为什么是最大加速度,刚刚有解释——现实运动加速度不是理想的固定值)。
二、运动过程分析
加速度是从 0 开始增加到最大加速度的,具体加速度随着时间的变化关系 a(t) 以及对应的速度随着时间变化关系 v(t) 示意如下:

图二 a(t) 和 v(t)
如图二,最左边的 a(t) 和 v(t) 可以理解为在这个加速到最大速度 V 的过程中,加速度是不断在改变的,先是 “慢慢” 变到最大加速度 A,再立刻从最大加速度 A “慢慢” 降为 0
而图二中最右边的 a(t) 和 v(t) 可以理解为在这个加速到最大速度 V 的过程中,加速度在极短的时间内变大到最大加速度 A,然后在最大加速度下保持一定时间的,再在最后接近运动结束时快速降为0
这里,加速度本身变化的快慢,即是我们这里说的 加加速度(Jerk)
这整个过程可以分为三个阶段:
- (1)加速度从0开始增加阶段,用时 t0
- (2)加速度保持最大的阶段,用时 t1
- (3)加速度降低到0的阶段,用时也是 t0
整体用时 t = t0+t1+t0
经过这三个阶段后,运动的速度从 0 增加到了目标速度 V
三、关系推导
回到这里的标题,已知 [目标速度] 、 [加速时间] 和 [加加速度(Jerk)],如何求运动过程的最大加速度呢?
下面开始推导,令:
V = 目标速度
t = 加速时间
J = 加加速度(Jerk)
A = 运动过程中的最大加速度
则:
根据运动过程的三阶段,t0 ~ t1 ~ t0,可知
(1)
加速度以加加速度 J 经过 t0 时间增加到了最大加速度 A,所以有
(2)
将(2)代入(1)中,可得: ,即
,即
(3)
由于速度随着时间变化关系 v(t) 的导函数为 加速度随着时间的变化关系 a(t),所以 a(t) 与 t 轴形成的面积即为速度的变化量 V
所以  ,简化,得
,简化,得
(4)
将(2)代入(4)中去除 t0 ,可得 ,即有
,即有
(5)
联立(3)(5),可得  ,
,
两边同时 x A,得  ,两边同时 x J,得
,两边同时 x J,得 
整理可得二元一次方程 :
解二元一次方程,可得 
又由(2)式,可得  ,并且由(1)式可知
,并且由(1)式可知  ,所以有
,所以有 
所以 A 只有一个解为:
其中, ,即
,即 
四、其它
本文公式使用的编辑器:https://math.edrawsoft.cn/
| 版权声明 本博客所有的原创文章,作者皆保留版权。转载必须包含本声明,保持本文完整,并以超链接形式注明作者 BensonLaur 和本文原始地址: |

 浙公网安备 33010602011771号
浙公网安备 33010602011771号