优化算法之梯度下降|Matlab实现梯度下降算法
题目要求:
使用Matab实现梯度下降法
对于函数:
min
f
(
x
)
=
2
x
1
2
+
4
x
2
2
−
6
x
1
−
2
x
1
x
2
\min f(x)=2 x_{1}^{2}+4 x_{2}^{2}-6 x_{1}-2 x_{1} x_{2}
minf(x)=2x12+4x22−6x1−2x1x2
试采用 MATLAB实现最速下降法求解该问题, 给出具体的迭代过程、 最终优化结果、涉及的代码, 以及自己的心得体会。
摘要
文章主要通过实现grad()函数进行梯度运算。
主要实现的功能:
- 通过Matlab语言实现梯度下降算法
- 利用Matlab的
plot3描绘出梯度下降循环迭代的过程,同时也描绘出极小值随迭代次数的图像。
梯度下降原理
梯度的概念
梯度:是一个向量,表示某一函数在该点处的方向导数沿着该方向取得最大值。
-
有大小:变化率最大(为该梯度的模);
-
有方向:函数在该点处沿着该方向(此梯度的方向)变化最快
定义:
设
z
=
f
(
x
,
y
)
z=f(x,y)
z=f(x,y)在点
P
0
(
x
0
,
y
0
)
P_{0}\left(x_{0}, y_{0}\right)
P0(x0,y0)处存在偏导数
f
x
′
(
x
0
,
y
0
)
f_{x}^{\prime}\left(x_{0}, y_{0}\right)
fx′(x0,y0)和
f
y
′
(
x
0
,
y
0
)
f_{y}^{\prime}\left(x_{0}, y_{0}\right)
fy′(x0,y0),则称向量
{
f
x
′
(
x
0
,
y
0
)
,
f
y
′
(
x
0
,
y
0
)
}
\left\{f_{x}^{\prime}\left(x_{0}, y_{0}\right), f_{y}^{\prime}\left(x_{0}, y_{0}\right)\right\}
{fx′(x0,y0),fy′(x0,y0)}为
f
(
x
,
y
)
在
P
0
(
x
0
,
y
0
)
f(x, y) \text { 在 } P_{0}\left(x_{0}, y_{0}\right)
f(x,y) 在 P0(x0,y0)的梯度,记作:
∇
f
∣
P
0
,
∇
z
∣
P
0
,
gradf
∣
P
0
或
gradz
∣
P
0
\left.\nabla f\right|_{P_{0}},\left.\nabla z\right|_{P_{0}},\left.\operatorname{gradf}\right|_{P_{0}} 或 \left.\operatorname{gradz}\right|_{P_{0}}
∇f∣P0,∇z∣P0,gradf∣P0或gradz∣P0
∴
∇
f
∣
P
0
=
gradf
∣
P
0
=
{
f
x
′
(
x
0
,
y
0
)
,
f
y
′
(
x
0
,
y
0
)
}
\left.\therefore \nabla f\right|_{P_{0}}=\left.\operatorname{gradf}\right|_{P_{0}}=\left\{f_{x}^{\prime}\left(x_{0}, y_{0}\right), f_{y}^{\prime}\left(x_{0}, y_{0}\right)\right\}
∴∇f∣P0=gradf∣P0={fx′(x0,y0),fy′(x0,y0)}
其中:
∇
\nabla
∇(Nabla)算子:
∇
=
∂
∂
x
i
+
∂
∂
y
j
\nabla=\frac{\partial}{\partial x} i+\frac{\partial}{\partial y} j
∇=∂x∂i+∂y∂j
梯度函数:
梯度的大小:
∣ ∇ f ∣ = [ f x ′ ( x , y ) ] 2 + [ f y ′ ( x , y ) ] 2 |\nabla f|=\sqrt{\left[f_{x}^{\prime}(x, y)\right]^{2}+\left[f_{y}^{\prime}(x, y)\right]^{2}} ∣∇f∣=[fx′(x,y)]2+[fy′(x,y)]2
梯度的方向:
设: v = { v 1 , v 2 } ( ∣ v ∣ = 1 ) v=\left\{v_{1}, v_{2}\right\}(|v|=1) v={v1,v2}(∣v∣=1)是任一给定方向,则对 ∇ f \nabla f ∇f与 v v v的夹角 θ \theta θ有:
∂ f ∂ v ∣ P 0 = f x ′ ( x 0 , y 0 ) v 1 + f y ′ ( x 0 , y 0 ) v 2 = { f x ′ ( x 0 , y 0 ) , f y ′ ( x 0 , y 0 ) } ∙ { v 1 , v 2 } = ∇ f ∣ P 0 ∙ v = ∣ ∇ f ∣ P 0 ∣ ⋅ ∣ v ∣ cos θ \begin{aligned} \left.\frac{\partial f}{\partial v}\right|_{P_{0}} &=f_{x}^{\prime}\left(x_{0}, y_{0}\right) v_{1}+f_{y}^{\prime}\left(x_{0}, y_{0}\right) v_{2} \\ &=\left\{f_{x}^{\prime}\left(x_{0}, y_{0}\right), f_{y}^{\prime}\left(x_{0}, y_{0}\right)\right\} \bullet\left\{v_{1}, v_{2}\right\} \\ &=\left.\nabla f\right|_{P_{0}} \bullet v=|\nabla f|_{P_{0}}|\cdot| v \mid \cos \theta \end{aligned} ∂v∂f P0=fx′(x0,y0)v1+fy′(x0,y0)v2={fx′(x0,y0),fy′(x0,y0)}∙{v1,v2}=∇f∣P0∙v=∣∇f∣P0∣⋅∣v∣cosθ
梯度下降法:
α ( k ) = argmin f ( x k − α ⋅ ∇ f ( x ( k ) ) ) \alpha_{(k)}=\operatorname{argmin} f\left(x^{k}-\alpha \cdot \nabla f\left(x^{(k)}\right)\right) α(k)=argminf(xk−α⋅∇f(x(k)))
梯度下降法的优缺点分析
优点:
(1)程序简单,计算量小;
(2)对初始点没有特别的要求;
(3)最速下降法是整体收敛的,且为线性收敛
缺点:
(1)它只在局部范围内具有“最速”属性, 对整体求解过程,它的下降速度是缓慢的;
(2)靠近极小值时速度减慢;
(3)可能会’之字型’地下降
核心代码和结果
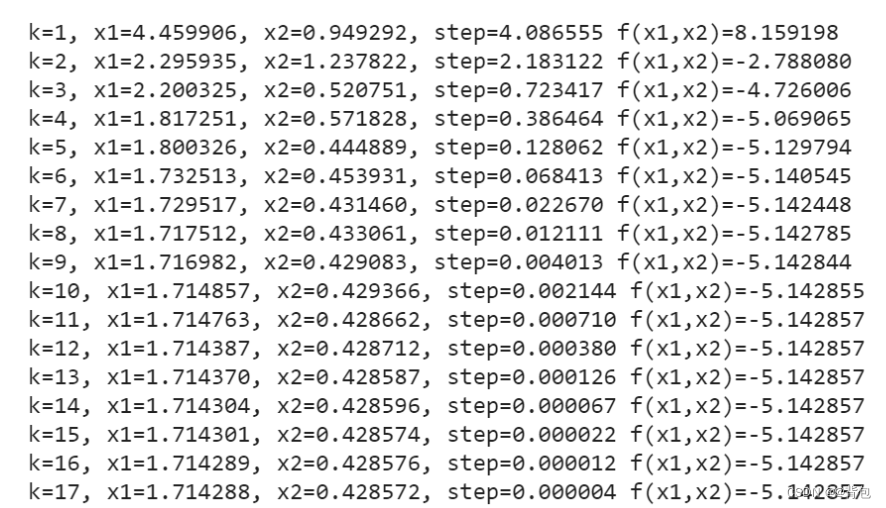
代码的迭代结果:
迭代过程:
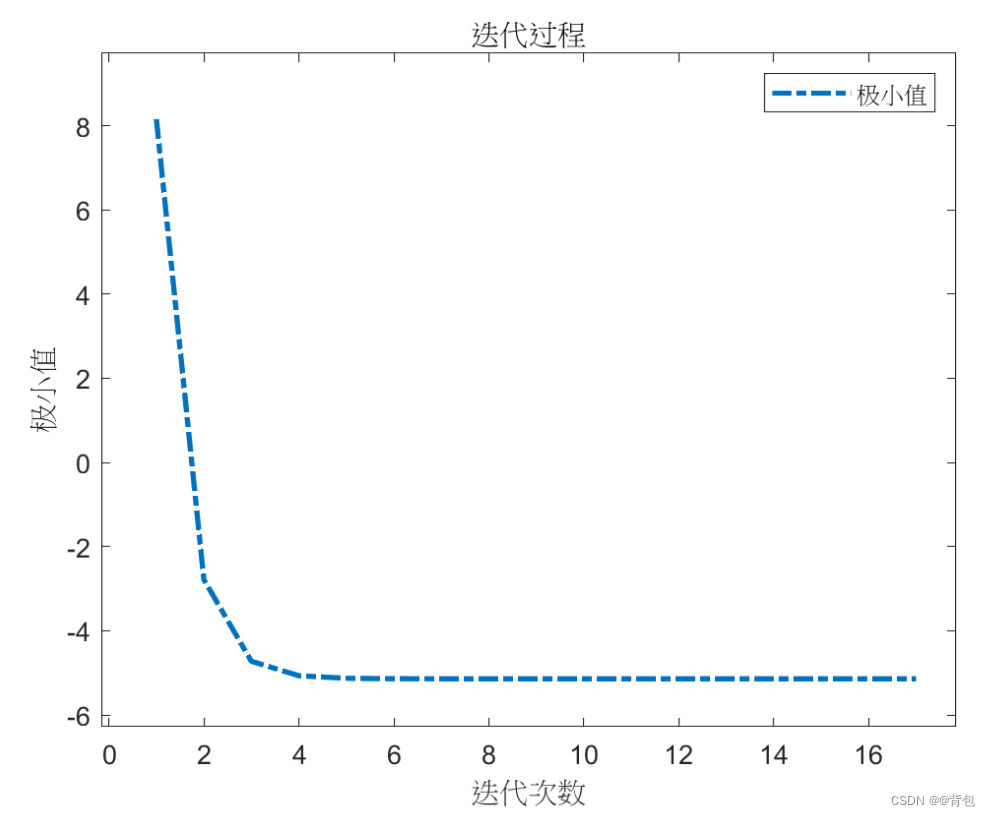
极小值-迭代次数趋势图像:
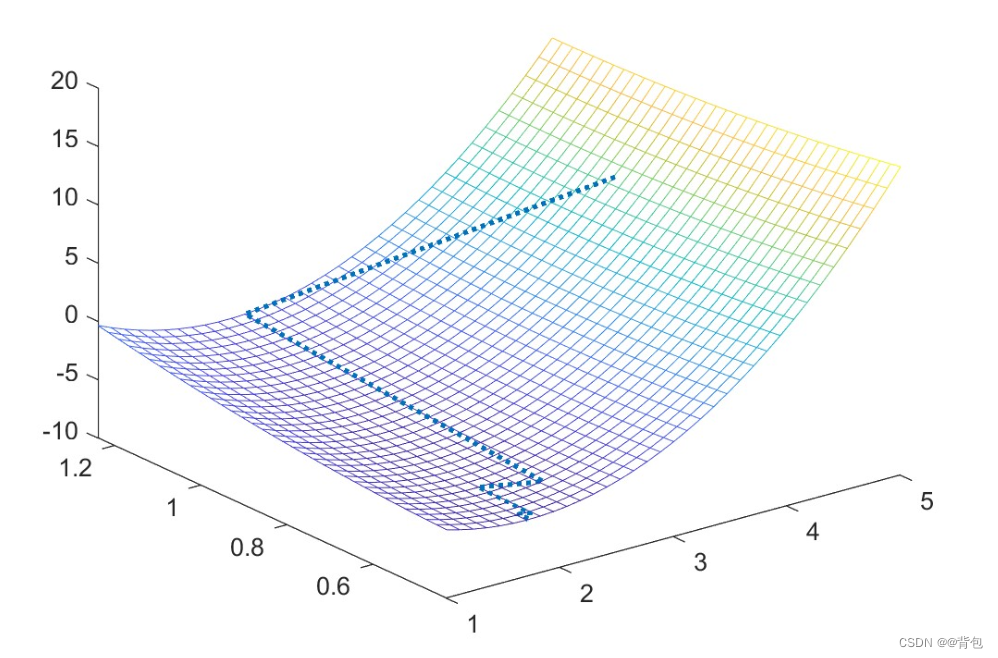
迭代结果在圆锥曲面上的可视化:
所求函数:
min
f
(
x
)
=
2
x
1
2
+
4
x
2
2
−
6
x
1
−
2
x
1
x
2
\min f(x)=2 x_{1}^{2}+4 x_{2}^{2}-6 x_{1}-2 x_{1} x_{2}
minf(x)=2x12+4x22−6x1−2x1x2
主函数:
clc,clear;
syms x1 x2 s; %声明符号变量
f1 =2*x1^2+4*x2^2-6*x1-2*x1*x2;%设定目标函数
[k,f1,f2,f3]=grad(f1,x1,x2,s,[0,1],10^(-5)); %设定起始点[x1 x2]=[-2.5,4.25]和精度10^(-2)
[result]=sprintf('在 %d 次迭代后求出极小值\n',k);%在迭代多少次之后求出极小值
disp(result);
figure(1);
plot(1:k,f3); % 作出函数图像
title('迭代过程');%输出结果
xlabel('迭代次数');
ylabel('极小值');
figure(2);
plot3(f1,f2,f3); % 画出方程图像
hold on;
syms x1 x2; % 声明符号变量
f=2*x1^2+4*x2^2-6*x1-2*x1*x2;
fmesh(f);
梯度下降核心函数实现:
function [iterator,f1,f2,f3] = grad(f,x1,x2,s,start_point,thereshold)
iterator = 0;%迭代次数赋值初始化
grad_f = [diff(f,x1) diff(f,x2)]; %计算f的梯度
delta = subs(grad_f,[x1,x2],[start_point(1),start_point(2)]);
%计算起点的梯度
step=1; %设置初始步长为1
current_point = start_point;%起点值赋给当前点
%最速下降法的主循环,判断条件为:梯度的模与所给精度值进行比较
while norm(delta) > thereshold
iterator = iterator + 1;%迭代次数+1
%一维探索 求最优步长(此时方向已知,步长s为变量)
x_next = [current_point(1),current_point(2)] - s* delta/norm(delta);% 计算x(k+1)点,其中步长s为变量
f_val = subs(f,[x1,x2],[x_next(1),x_next(2)]);% 将x值带入目标函数中
step = abs(double(solve(diff(f_val,s)))); % 对s求一阶导,并加绝对值符号,得到最优步长的绝对值
step = step(1);%更新步长
%计算x(k+1)点
current_point = double([current_point(1),current_point(2)] - step * delta/norm(delta));
%计算x(k+1)点的梯度值
delta = subs(grad_f,[x1,x2],[current_point(1),current_point(2)]);
%计算函数值
f_value = double(subs(f,[x1,x2],[current_point(1),current_point(2)]));
%输出迭代计算过程
result_string=sprintf('k=%d, x1=%.6f, x2=%.6f, step=%.6f f(x1,x2)=%.6f',iterator,current_point(1),current_point(2),step,f_value);
f1(iterator)=current_point(1);
f2(iterator)=current_point(2);
f3(iterator)=f_value;
disp(result_string);
end
end
梯度算法的局限性及其优化
神经网络中,梯度的搜索是使用最为广泛的参数寻优方法,在此类方法美些视策解出发,代寻找最优参数值、每次送代中,我们先计算设置函数当前点的梯度,并根据梯度确定搜索方向。
在搜索过程中,我们可能会遇到陷入局部最小的问题,如果误差函数具有多个局部极小,则不能保证找到的解是全局最小,对后一种情形,我们称参数寻优陷入了局部极小,这显然不是我们所希望的。
在现实任务中,人们常采用以下策略来试图“跳出”局部极小 从而进-步接近全局最小:
- 以多组不同参数值初始化多个神经网络,按标准方法训练后,取其中误差最小的解作为最终参数.这相当于从多个不同的初始点开始搜索,这样就可能陷入不同的局部极小,从中进行选择有可能获得更接近全局最小的结果.
但是也会造成“跳出”全局最小 - 使用“模拟退火”技术,模拟退火在每一步都以一定的概率接受比当前解更差的结果,从而有助于“跳出”局部极小.在每步迭代过程中、接受“你优解》的概率要随着时间的摊移而逐渐降低。从而保证算法稳定
- 使用随机梯度下降.与标准梯度下降法精确计算梯度不同,随机梯度下降法在计算梯度时加入了随机因素。于是,即便陷入局部极小点,它计算出的梯度仍可能不为零,这样就有机会跳出局部极小继续搜索。