PCL学习(三) SAC-IA 估记object pose
SAC-IA是基于RANSAC算法的对齐算法
通过降采样提高法向计算、FPFH特征的计算
最后通过SAC-IA计算得到对齐的旋转和平移
#include <Eigen/Core>
#include <pcl/point_types.h>
#include <pcl/point_cloud.h>
#include <pcl/common/time.h>
#include <pcl/console/print.h>
#include <pcl/features/normal_3d_omp.h>
#include <pcl/features/fpfh_omp.h>
#include <pcl/filters/filter.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/io/pcd_io.h>
#include <pcl/registration/icp.h>
#include <pcl/registration/sample_consensus_prerejective.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <string>
#include <iostream>
#include <stdio.h>
#include <stdlib.h>
// Types
typedef pcl::PointNormal PointNT;
typedef pcl::PointCloud<PointNT> PointCloudT;
typedef pcl::FPFHSignature33 FeatureT;
typedef pcl::FPFHEstimationOMP<PointNT, PointNT, FeatureT> FeatureEstimationT;
typedef pcl::PointCloud<FeatureT> FeatureCloudT;
typedef pcl::visualization::PointCloudColorHandlerCustom<PointNT> ColorHandlerT;
//handle the param of the align in the txt to save the fucking time of complie
int parseConfigFile(
const std::string &filepath,
char *objFile,
char *sceFile,
float *downLeaf
);
// Align a rigid object to a scene with clutter and occlusions
int main(int argc, char **argv)
{
// Point clouds
PointCloudT::Ptr object(new PointCloudT);
PointCloudT::Ptr object_aligned(new PointCloudT);
PointCloudT::Ptr scene(new PointCloudT);
FeatureCloudT::Ptr object_features(new FeatureCloudT);
FeatureCloudT::Ptr scene_features(new FeatureCloudT);
// Get input object and scene
/*if (argc != 3)
{
pcl::console::print_error("Syntax is: %s object.pcd scene.pcd\n", argv[0]);
return (1);
}*/
/*std::string paramFilePath = "data/param.txt";
char *obj_filepath = { '\0' };
char *sce_filepath = { '\0' };
float *downsample_leaf = nullptr;
parseConfigFile(
paramFilePath,
obj_filepath,
sce_filepath,
downsample_leaf
);*/
// Load object and scene
pcl::console::print_highlight("Loading point clouds...\n");
if (pcl::io::loadPCDFile<PointNT>("data/obj_seg.pcd", *object) < 0 ||//"data/obj_seg.pcd"
pcl::io::loadPCDFile<PointNT>("data/sce_seg.pcd", *scene) < 0) //"data/sce_seg.pcd"
{
pcl::console::print_error("Error loading object/scene file!\n");
return (1);
}
// Downsample
pcl::console::print_highlight("Downsampling...\n");
pcl::VoxelGrid<PointNT> grid;
const float leaf = 0.08f;//0.005f == resolution of 5mm
grid.setLeafSize(leaf, leaf, leaf);
grid.setInputCloud(object);
grid.filter(*object);
grid.setInputCloud(scene);
grid.filter(*scene);
// Estimate normals for scene
pcl::console::print_highlight("Estimating scene normals...\n");
pcl::NormalEstimationOMP<PointNT, PointNT> nest;
nest.setRadiusSearch(0.01);
nest.setInputCloud(scene);
nest.compute(*scene);
// Estimate features
pcl::console::print_highlight("Estimating features...\n");
FeatureEstimationT fest;
fest.setRadiusSearch(0.025);
fest.setInputCloud(object);
fest.setInputNormals(object);
fest.compute(*object_features);
fest.setInputCloud(scene);
fest.setInputNormals(scene);
fest.compute(*scene_features);
// Perform alignment
pcl::console::print_highlight("Starting alignment...\n");
pcl::SampleConsensusPrerejective<PointNT, PointNT, FeatureT> align;
align.setInputSource(object);
align.setSourceFeatures(object_features);
align.setInputTarget(scene);
align.setTargetFeatures(scene_features);
align.setMaximumIterations(100000); // Number of RANSAC iterations 50000
align.setNumberOfSamples(3); // Number of points to sample for generating/prerejecting a pose
align.setCorrespondenceRandomness(5); // Number of nearest features to use
align.setSimilarityThreshold(0.9f); // Polygonal edge length similarity threshold
align.setMaxCorrespondenceDistance(2.5f * leaf); // Inlier threshold
align.setInlierFraction(0.25f); // Required inlier fraction for accepting a pose hypothesis
{
pcl::ScopeTime t("Alignment");
align.align(*object_aligned);
}
if (align.hasConverged())
{
// Print results
printf("\n");
Eigen::Matrix4f transformation = align.getFinalTransformation();
pcl::console::print_info(" | %6.3f %6.3f %6.3f | \n", transformation(0, 0), transformation(0, 1), transformation(0, 2));
pcl::console::print_info("R = | %6.3f %6.3f %6.3f | \n", transformation(1, 0), transformation(1, 1), transformation(1, 2));
pcl::console::print_info(" | %6.3f %6.3f %6.3f | \n", transformation(2, 0), transformation(2, 1), transformation(2, 2));
pcl::console::print_info("\n");
pcl::console::print_info("t = < %0.3f, %0.3f, %0.3f >\n", transformation(0, 3), transformation(1, 3), transformation(2, 3));
pcl::console::print_info("\n");
pcl::console::print_info("Inliers: %i/%i\n", align.getInliers().size(), object->size());
// Show alignment
pcl::visualization::PCLVisualizer visu("Alignment");
visu.addPointCloud(scene, ColorHandlerT(scene, 0.0, 255.0, 0.0), "scene");
visu.addPointCloud(object_aligned, ColorHandlerT(object_aligned, 0.0, 0.0, 255.0), "object_aligned");
visu.spin();
system("PAUSE");
}
else
{
pcl::console::print_error("Alignment failed!\n");
system("PAUSE");
return (1);
}
return (0);
}
int parseConfigFile(
const std::string &filepath,
char *objFile,
char *sceFile,
float *downLeaf
)
{
// open the configuration file
FILE *file = fopen(filepath.c_str(), "r");
//FILE *stream;//test
if (!file)
{
fprintf(stderr, "Cannot parse configuration file \"%s\".\n",
filepath.c_str());
exit(1);
}
//read parameters
char buf[256];
while (fscanf(file, "%s", buf) != EOF) {
switch (buf[0]) {
case '#':
fgets(buf, sizeof(buf), file);
break;
case'o':
fgets(buf, sizeof(buf), file);
memcpy(objFile, buf + 1, strlen(buf) - 2);
//printf("%s", objFile);
break;
case's':
fgets(buf, sizeof(buf), file);
memcpy(sceFile, buf + 1, strlen(buf) - 2);
break;
case'l':
fscanf(file, "%f", downLeaf);
}
}
return 0;
}
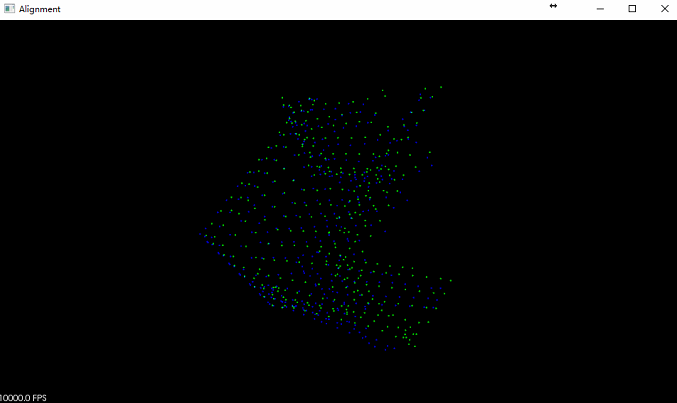
对齐前的点云数据(采集于两帧kinect的扫描深度图)

对齐后的结果
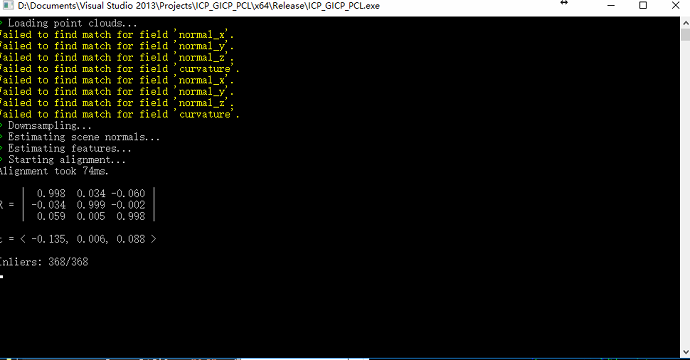
对齐的旋转和平移,以及对齐速度

 浙公网安备 33010602011771号
浙公网安备 33010602011771号