
RealSenseD435的一些参数整理
一、深度相机D435
二、自校准功能
https://www.intelrealsense.com/self-calibration-for-depth-cameras/
https://dev.intelrealsense.com/docs/self-calibration-for-depth-cameras?_ga=2.3349108.557786983.1670234972-1459684402.1670234972
具体怎么校准的看上面第二条链接
这个数字是设备校准健康状况的完整指示,可以随着时间的推移进行跟踪。自校准功能还允许您以最快 0.6 秒的速度运行重新校准——相机深度可以在不到一秒的时间内恢复到近乎完美的性能。由于不需要目标、方格图案墙或复杂的设置(如相机的特定运动路径)或相机静止的需要,自校准非常简单,只需调用片上函数即可。
三、技术规格
https://www.intelrealsense.com/depth-camera-d435/
https://www.intelrealsense.com/wp-content/uploads/2022/11/Intel-RealSense-D400-Series-Datasheet-November-2022.pdf
特征
- 使用环境:室内/室外
- 理想范围:0.3至3m
深度相机
- 深度技术:立体最大分辨率下的
- 深度视野(FOV):87度x58度
- 最小深度距离(Min-Z):~28cm
- 深度输出分辨率:高达1280x720
- 深度精度:< 2% at 2m^1
- 深度帧率:高达90 fps
- 图像传感器技术:全局快门
RGB相机
- RGB帧分辨率:1920x1080
- RGB传感器视野FOV(HxV):69度x42度
- RGB帧率:30fps
- RGB传感器分辨率:2Mp
- RGB传感器技术:Rolling Shutter
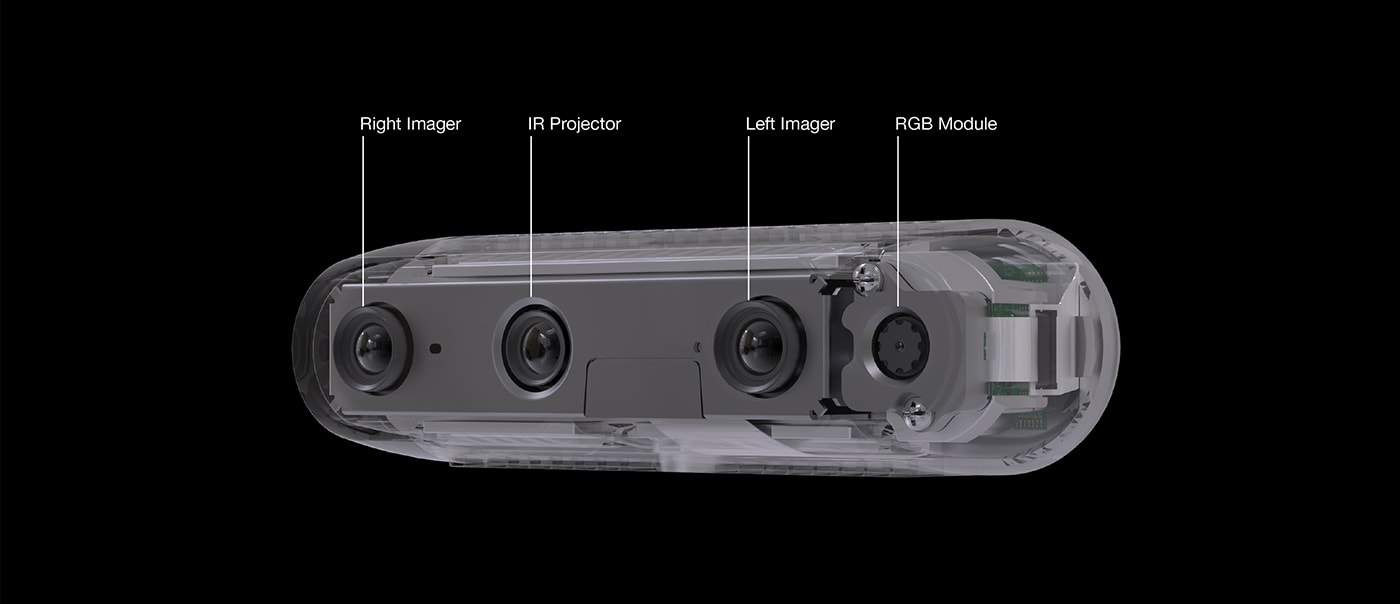
主要成分
- 摄像头模组:Intel RealSense Module D430 + RGB Camera
- 视觉处理器板:Intel RealSense Vision Processor D4
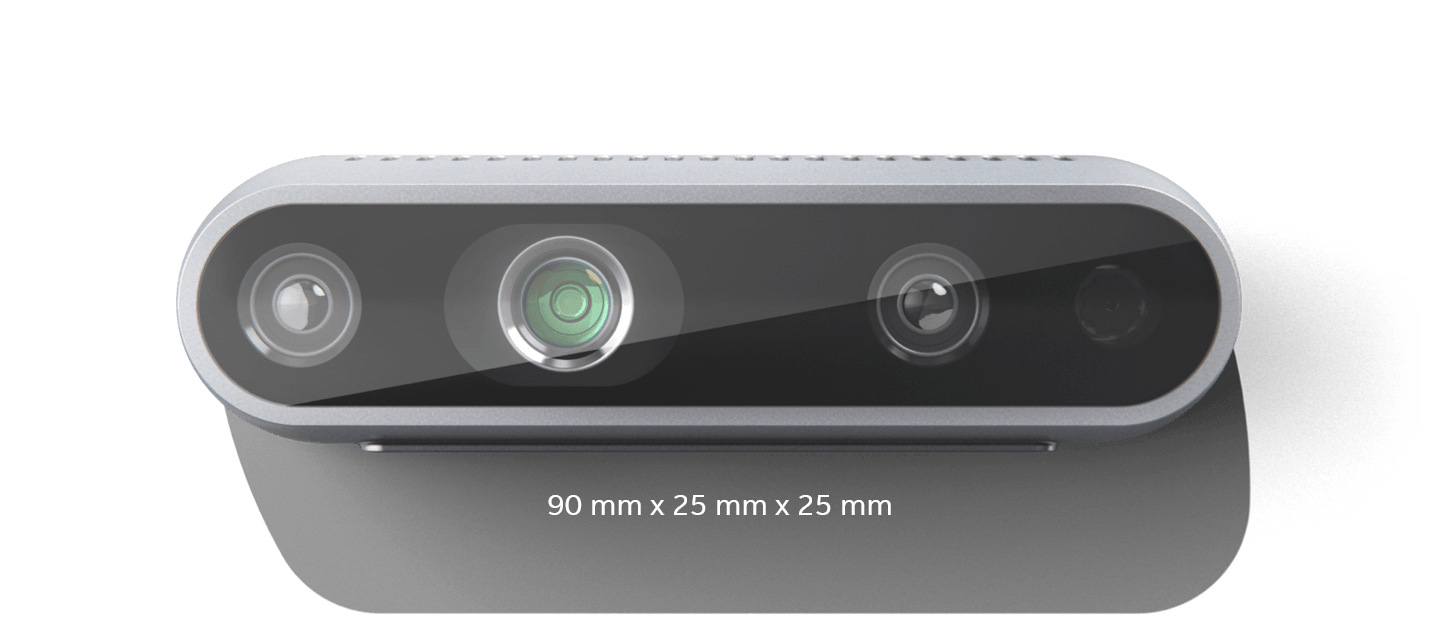
尺寸
- 长深高:90mmx25mmx25mm
- 安装机制:一个1/4-20 UNC 螺纹安装点、两个M3螺纹安装点
四、开发者中心
https://www.intelrealsense.com/developers/
realSense的文档:https://dev.intelrealsense.com/docs?_ga=2.32783866.557786983.1670234972-1459684402.1670234972
API How to:https://dev.intelrealsense.com/docs/api-how-to
API 文档:https://intelrealsense.github.io/librealsense/doxygen/annotated.html
SDK 2.0 例程:https://dev.intelrealsense.com/docs/code-samples

 浙公网安备 33010602011771号
浙公网安备 33010602011771号