
【ORB-SLAM3】OEB-SLAM3运行EuRoC数据集
数据集地址:
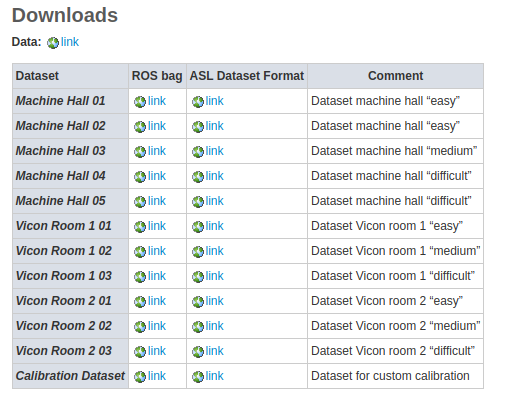
https://projects.asl.ethz.ch/datasets/doku.php?id=kmavvisualinertialdatasets
我下载的是Machine Hall 01 的ASL Dataset Format
然后在ORB-SLAM3的文件夹中运行,其中~/DataSet/EuRoc/为下载EuRoC的地址。
./Examples/Monocular-Inertial/mono_inertial_euroc ./Vocabulary/ORBvoc.txt ./Examples/Monocular-Inertial/EuRoC.yaml ~/DataSet/EuRoc/MH_01_easy/ ./Examples/Monocular-Inertial/EuRoC_TimeStamps/MH01.txt

参考博客:https://blog.51cto.com/u_15069487/4544586
因为我运行mono_euroc不显示图像,所以运行mono_inertial_euroc,画面可以正常显示。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号