HMM学习笔记
HMM学习笔记
0 前言
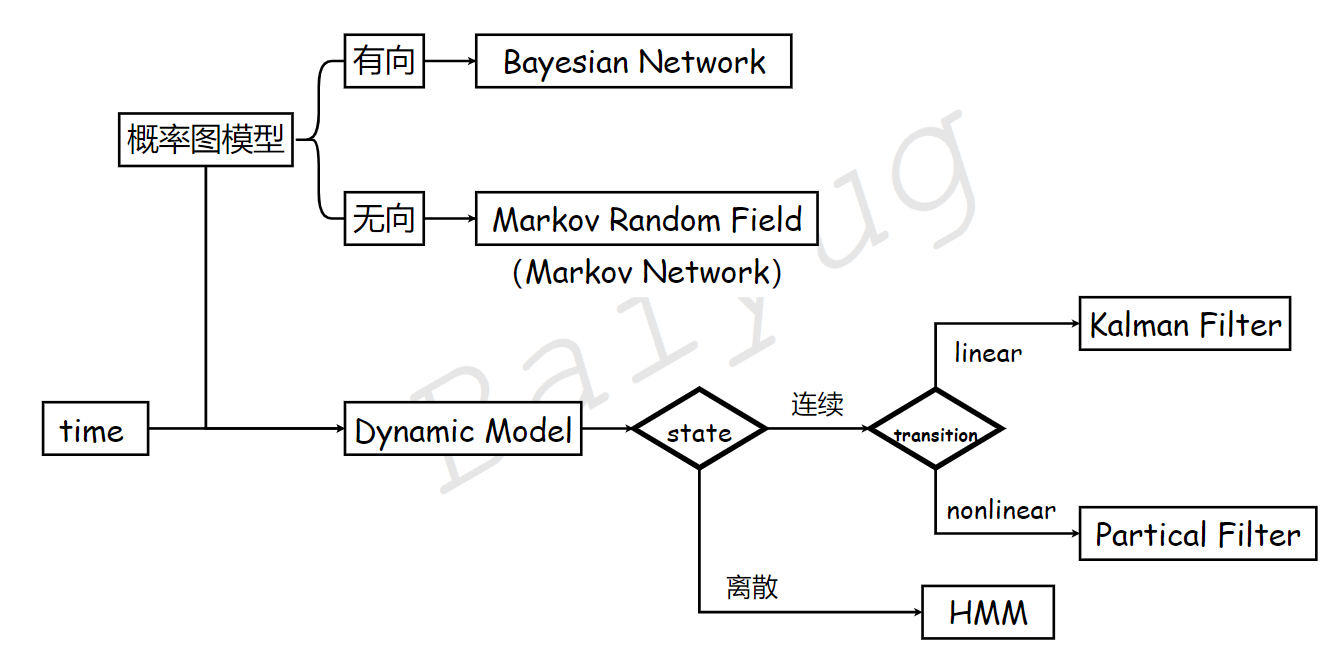
隐马尔可夫模型(Hidden Markov Model,HMM)是一种经典的统计学模型,根本上属于传统机器学习中的概率图模型。学习该模型的前置知识为随机过程。
1 定义
1.1 概念引入
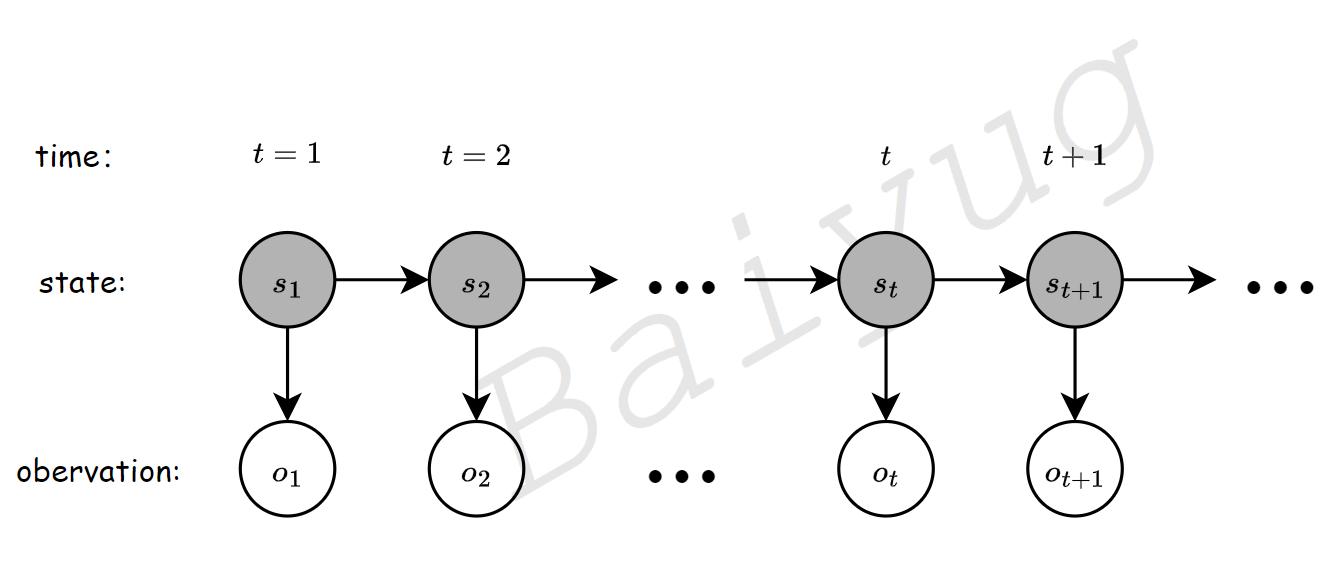
上图展示了隐马尔可夫链的基本元素和基本结构。隐马尔可夫的基本元素包含状态序列(state sequence)和观测序列(obervation sequence),状态序列一般不可知,或者说被隐藏起来了,故名隐马尔可夫链,观测序列一般可知。从结构上可知,状态变量和观测变量会随着时间而变化。描述这个变化的过程需要引入状态转移概率矩阵A和观测概率矩阵B。
1.2 变量定义
设状态变量\(s_t\)的值域为\(Q=\{q_1,q_2,\cdots,q_t,\cdots,q_N\}\),观测变量\(o_t\)的值域为\(V=\{v_1,v_2,\cdots,v_t,\cdots,v_M\}\),\(N=length(Q)\),\(M=length(V)\)。
设序列长度为\(T\),则状态序列\(S=(s_1,s_2,\cdots,s_t,\cdots,s_T)\),观测序列\(O=(o_1,o_2,\cdots,o_t,\cdots,o_T)\)。
定义状态转移概率矩阵
其中,\(a_{ij}=p(s_{t+1}=q_j|s_t=q_i),\qquad i=1,2,\cdots,N;j=1,2,\cdots,N\)。\(a_{ij}\)是在时刻\(t\)处于状态\(q_i\)条件下在时刻\(t+1\)转移到状态\(q_j\)的概率。
定义观测概率矩阵
其中,\(b_j(k)=P(o_t=v_k|s_t=q_j),\qquad k=1,2,\cdots,M;j=1,2,\cdots,N\),\(b_j(k)\)是在时刻\(t\)处于状态\(q_j\)的条件下观测\(v_k\)的概率。
定义初始概率向量
其中,\(\pi_i=P(s_1=q_i),\qquad i=1,2,\cdots,N\), \(\pi_i\)是时刻\(t=1\)处于状态 \(q_i\)的概率。
由此,可构建隐马尔可夫模型参数\(\lambda=(A,B,\pi)\)
1.3 两个基本假设
-
(i)齐次马尔可夫性假设,即假设隐藏的马尔可夫链在任意时刻\(t\)的状态只依赖于前一时刻的状态,于其他时刻的状态及观测无关,也与时刻\(t\)无关。
\[p(s_{t}|s_{t-1},\cdots,s_1,o_t,o_{t-1},\cdots,o_1)=p(s_{t}|s_{t-1}) \] -
(ii)观测独立性假设,即假设任意时刻的观测只依赖于该时刻的马尔可夫链的状态,与其他观测及状态无关。
\[p(o_t|s_T,s_{T-1},\cdots,s_1,o_T,o_{T-1},\cdots,o_1)=p(o_t|s_t) \]
1.4 举例解释
假设现有{盒子1,盒子2,盒子3,盒子4},每个盒子内含有若干数量不等的红球和白球。现在,观测者首先选择一个盒子,然后从该盒子里抽取一个球,获得该球的颜色,然后操作员会更换盒子,继续让观测者抽球。说明:盒子的更换规则观测者不知情。
那么,在这个例子中,观测者会获得一个关于小球颜色的序列,该序列就是观测序列;操作员依次更换盒子,操作员会得到一个关于盒子序号的序列,该序列就是对于观测者来讲就是状态序列,各个盒子中抽取红白球的概率会组成观测概率矩阵,盒子的更换方式会组成状态转移概率矩阵,观测者选择第一个盒子的概率分布称为初始状态概率向量。
详细例子见《统计学习方法》,李航,清华大学出版社,P173
1.5 三个基本问题
-
Evaluation:已知\(O,\lambda\),求解\(p(O|\lambda)\);
-
Learning:已知\(O\),求\(\lambda\),使\(\lambda_{MLE}=\mathop{argmax}\limits_{\lambda}p(O|\lambda)\)
-
Decoding:已知\(O,\lambda\),求\(S\),使\(\hat{S}=\mathop{argmax}\limits_{S}p(S|O,\lambda)\)
2 Evaluation Problem
2.1 直接计算法
注:
边缘概率可以展开为联合概率的和;
联合概率可以展开为含有条件概率的形式;如\(P(AB)=P(A|B)P(B)\)
根据基本假设(i),可得
注:其中,\(a_{s_{t-1},s_t}\) 表示从状态\(s_{t-1}\)到状态\(s_t\)的转移概率,为了和1.2中的变量a_{ij}相对应,可以令\(i=locate(s_{t-1})\),\(j=locate(s_t)\),对应\(s_{t-1}\)和\(s_t\)在\(Q\)(定义见1.2)中的位置序号,则\(a_{s_{t-1},s_t}\)可以用\(a_{ij}\)表示,上式为了表述清晰,便直接使用状态变量代替了位置序号,与定义中的公式表达略有不同。
根据基本假设(ii),对于状态序列\(S=(s_1,s_2,\cdots,s_t,\cdots,s_T)\),有
注:上式与\(a_{ij}\)类似,使用状态变量\(s_t\)表示状态变量在\(Q\)中的位置序号,使用观测变量\(o_t\)表示观测变量在\(V\)(定义见1.2)中的位置序号。
于是有
对上述\(\sum\limits_{S}\)做解释:这里的意思是对后面的含有\(s_1,s_2,\cdots,s_T\)这些\(T\)个随机变量分别求均值再求和,即对状态变量求T次均值,每个状态变量都有\(N\)个取值,也就是说,计算上式需要进行\(N^T\)个均值计算再求和,计算时间复杂度为\(O(N^T)\)。随着\(T\)的增加,时间计算复杂度指数级增长。
2.2 前向算法
给定\(\lambda\),\(O=(o_1,o_2,\cdots,o_t)\),定义:到时刻\(t\)观测序列为\(o_1,o_2,\cdots,o_t\)且状态为\(q_i\)的概率为前向概率,记为
所以,
因此,欲求时刻t的\(p(O|\lambda)\),即求 \(\alpha_t(i)\)。可以通过递归的思想求解\(\alpha_t(i)\)
可以看出来,上式依旧是使用了2.1使用过技巧
- 将联合概率拆解为条件概率及其条件的概率的乘积
- 利用基本假设(i)(ii)
因此,给定\(\lambda=(A,B,\pi), O=(o_1,o_2,\cdots,o_T)\), 可得\(\alpha_t(i)\) 的初始条件 \(\alpha_1(i)\)
然后可以利用推导出的递归表达式计算出\(\alpha_t(1),\alpha_t(2), \cdots,\alpha_t(T)\),然后求和即可得到\(p(O|\lambda)\)。在每个递归式中,需要计算\(N\)个\(\alpha_{t-1}(i),\{i=1,2,\cdots,N\}\),获得\(N\)个\(\alpha_{t}(i),\{i=1,2,\cdots,N\}\),则每个递归式的时间复杂度为\(O(N^2)\),又观测序列的长度为\(T\),即需要进行T次递归,则该算法的时间复杂度为\(O(N^2T)\)。
3 Decoding Problem
decoding 问题就是根据观测序列求解最有可能的状态序列。
该问题的求解主要涉及到Viterbi Algorithm(维特比算法)。维特比算法是一种动态规划算法。它用于寻找最有可能产生观测事件序列的维特比路径——隐含状态序列。
定义:观测序列为\(o_1,o_2,\cdots,o_t\),模型参数为\(\lambda\),到时刻\(t\),状态变量\(s_t\)为\(q_i\)的概率最大,概率大小记为\(\delta_t(i)\)。
相应的,可以推出
定义在时刻\(t+1\)状态为\(j\)的所有单个路径\((j_1,j_2,\cdots,j_t,j_{t+1})\)中概率最大的路径的第\(t+1\)个节点为
代码示例
物理背景同1.4
clc
clear
close all
A = [0.5 0.2 0.3;
0.3 0.5 0.2;
0.2 0.3 0.5];
B = [0.5 0.5;
0.4 0.6;
0.7 0.3];
PI = [0.2; 0.4; 0.4];
lambda = {A, B, PI};
%红-1 白-2
O = [1 2 1];
%代码中的输入观测序列和输出状态序列需进行合理的数学编码,例如上述O代表{红,白,红},输出状态序列同理
my_viterbi(lambda, O)
function S_decode = my_viterbi(lambda, O)
A = lambda{1, 1};
B = lambda{1, 2};
PI = lambda{1, 3};
numO = length(O);
S_decode = zeros(1, numO);
% initialize
N = length(PI);% number of states
Psi = zeros(N, numO);
Delta = zeros(N, numO);
for i = 1:N
Delta(i, 1) = PI(i) * B(i, O(1));
end
% recursive
for k = 1:numO-1
for i = 1:N
temp = zeros(N,1);
for j = 1:N
temp(j) = Delta(j, k)*A(j,i);
end
[temp_max, max_index] = max(temp);
Delta(i, k+1) = temp_max*B(i, O(k+1));
Psi(i, k+1) = max_index;
end
end
% end
[temp_max, max_index] = max(Delta(:, end));
P_decode_path = temp_max;
tail_decode_point = max_index;
% path traceback
S_decode(numO) = tail_decode_point;
for k = numO-1:-1:1
S_decode(k) = Psi(S_decode(k+1), k+1);
end
end
4 参考资料
[1] b站机器学习白板推导系列[DB/OL]
[2] 统计学习方法[M].李航.清华大学出版社.2011.
