第三章 存储器(重点)(一)
3.1 概述
一、存储器分类
1. 按存储介质分类
易失
- 半导体存储器 ------> 双极性TTL、MOS(得有电)
不易失 - 磁表面存储器 -----> 磁头、载磁体
- 磁芯存储器 -------> 硬磁材料、环状元件
- 光盘存储器 --------> 激光、磁光材料
2. 按存取方式分类
(1)存取时间与物理地址无关(随机访问)
- 随机存储器(RAM):在程序的执行过程中可读、可写
- 只读存储器(ROM):在执行过程中只读
(2)存取时间与物理地址有关(串行/顺序访问) - 顺序存取存储器 磁带
- 直接存取存储器 磁盘(CHS)
- 相联存储器 ————> 用于快表(TLB),按内容寻址
3. 按计算机中的作用分类

二、存储器的层次结构
1. 存储器三个主要特性关系

2. 缓存—主存层次 和 主存—辅存层次

注:
- 辅存:固态硬盘(SSD)
- 实地址、物理地址是一个概念
- 虚地址、逻辑地址一个概念,可以用于程序设计
- 虚拟存储器是操作系统干的活
- CPU不能直接访问辅存,可以利用操作系统(OS)来访问
- 缓存—主存由硬件来完成,主存—辅存由OS来完成
- 缓存相当于是备份了一小部分的主存中的内容
- 操作系统(OS)通过缺页异常来完成主存和辅存之间数据的交换功能
- CPU取数据:CPU访问的永远是逻辑地址,操作系统要对逻辑地址判断是否在主存中,如果是还要判断是否在缓存中,若缓存中没有就要去主存中找,主存没有就去辅存。而 CPU 不能直接访问辅存,借用 OS 的缺页异常来把虚拟存储中的数据装入主存中,从而获得主存地址让CPU访问。
3.2 主存储器
一、概念
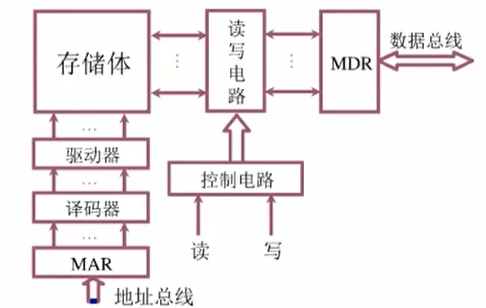
1. 主存储器的基本组成
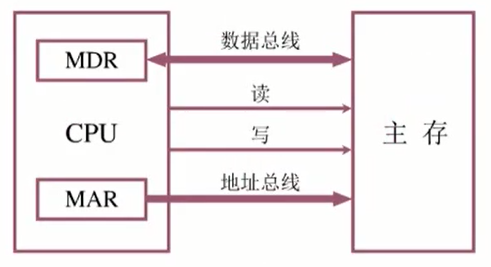
2. 主存和 CPU 的联系
3. 主存中存储单元地址的分配

注:
(1)注意是按字编址,还是按字节编址
(2)存储字为由高到低,当首字节存储的是高位的时候是大端存储,当首字节存储的是低位的时候是大小端存储。
4. 主存的技术指标
- 存储容量:主存存放二进制代码的总位数
- 存储速度:
- 存储时间:存储器的访问时间,读出时间、写入时间(一般读入快,写入慢)
- 存取周期:连续两次独立的存储器操作(读或写)所需的最小间隔时间,读周期、写周期
- 存储器的宽带:单位时间内从存储体存储的信息量(位/秒)
二、半导体存储芯片简介
1. 半导体存储芯片的基本结构

注:
(1)芯片容量 = 2地址线个数 × 数据线数;ps:10根地址线有210个单元,每根数据线 1 bit
(2)片选线:低电位有效CS、CE
(3)读/写控制线:WE(低电平写、高电平读)、OE(允许读)、WE(允许写)
(4)片选线不在存储芯片内,芯片内只有地址线、数据线,片选线只是一个引脚。作用:选中多位芯片,用于芯片的扩展

2. 半导体存储芯片的译码驱动方式
译码驱动:对于用户来提供地址线,来找对应的“房间号”。
(1)线选法 16 × 8 bit 存储芯片
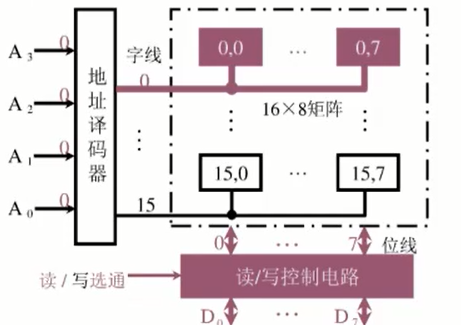
解析上图:只需要4根地址线通过地址译码器来找这16个“房间”。缺点:“房间”要是多了,连接“房间”的线太多
(2)重合法 1k × 1 bit 存储芯片

解析上图:采用矩阵(线代)的思想,1k × 1 bit=1024 bit,1024 = 210 = 25 × 25 = 32 × 32;————> 行地址只需5根地址线,通过32根线来连接“房间”。同理列地址也是如此(18年408)
三、随机存储器(RAM)
1. 静态RAM(SRAM)——>了解为主
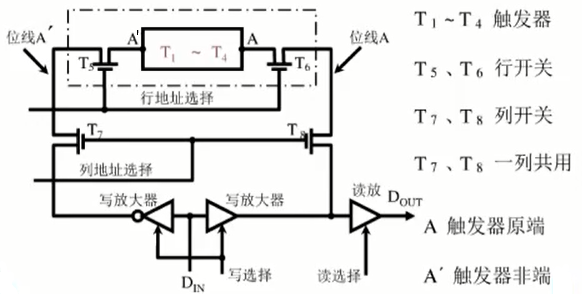
1.1 静态RAM基本电路
这里电路408考试过去11年没有出过题目,自主命题看高校
图片解析:
- T1 ~ T4四个管构成双稳态管,原端与非端存储相反且保持不变,除非进行写操作和掉电。
- 类似T5,若下端给高电位则导通,低电位阻塞。
- 缺点:能耗较高
1.2 静态RAM基本电路的读操作
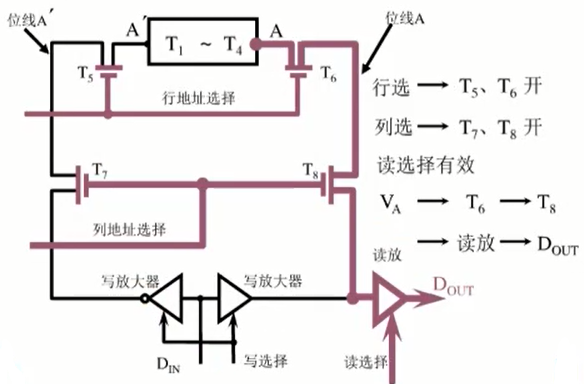
1.3 静态RAM基本电路的读操作

(2)SRAM 芯片举例(可能会考该芯片的存储容量)
外部特点:
读写:WE、片选线:CS、地址线、数据线
2. 动态RAM(DRAM)

| 三管式 | 单管式 |
|---|---|
| 读入与原存信息相反 | 读出时数据线有电流,为“1” |
| 写入与输入信息相同 | 写入时CS充电为“1”,放电为“0” |
注:DRAM电容有再生(刷新)的问题,优点:能耗较低
2.1 单管动态RAM4116(16k * 1bit)外特性(很重要)

图片解析:
(1)行选信号RAS,列选信号CAS,地址线为什么7根?可以联系重合法
(2)行、列地址分开传送
| 读时序 | 写时序 |
|---|---|
| 行地址RAS低电平有效 | 行地址RAS低电平有效 |
| 写允许WE有效(高) | 写允许WE有效(低) |
| 列地址CAS低电平有效 | 数据DIN有效 |
| 数据DOUT有效 | 列地址CAS低电平有效 |
2.2 动态RAM刷新 ——> 刷新与行地址有关
- 刷新间隔:为了维持 DRAM 记忆单元的存储信息,每隔一定时间必须刷新。一般选定的最大刷新间隔为2ms或4ms甚至更大,也就是说,应在规定的时间内,将全部存储体刷新一遍。
注:刷新和重写(再生)是两个完全不同的概念,切不可加以混淆。重写是随机的,某个存储单元只有在破坏性读出之后才需要重写。而刷新是定时的,即使许多记忆单元长期未被访问,若不及时补充电荷的话,信息也会丢失。重写一般是按存储单元进行的,而刷新通常以存储体矩阵中的一行为单位进行的。
(1)集中刷新
以 128 × 128 矩阵为例(存取周期为 0.5 μs)————> 刷新时不进行读写操作
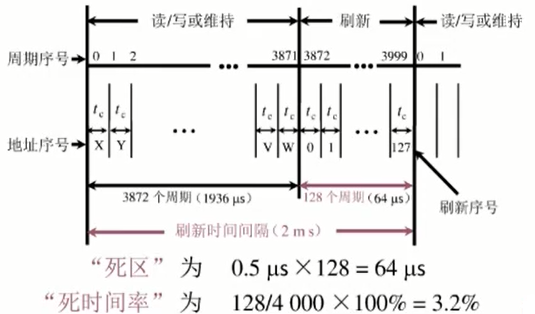
- 集中刷新方式的优点是读写操作时不受刷新工作的影响,因此系统的存取速度比较高。主要缺点是在集中刷新期间必须停止读写,这一段时间称为“死区”,而且存储容量越大,死区就越长
- 刷新时间 = 存储矩阵行数 × 刷新周期(这里刷新周期是指刷新一行所需要的时间,由于刷新过程就是“假读”的过程,所以刷新周期就等于存取周期。)
- 死区:刷新区间不能向外提供服务。
- 4000 = 刷新时间间隔 / 存取周期
(2)分散刷新
以 128 × 128 矩阵为例(存取周期为 1 μs)

- 代价:系统的存取周期加长且刷新过于频繁
- 分散刷新是指把刷新操作分散到每个存取周期内进行,此时系统的存取周期被分为两部分,前一部分时间进行读写操作或保持,后一部分时间进行刷新操作。在一个系统存取周期内刷新存储矩阵中的一行。
(3)分散刷新与集中刷新相结合(异步刷新)
以 128 × 128 矩阵为例(存取周期为 0.5 μs)

- 把刷新操作平均分配到整个最大刷新间隔时间内进行
- 相邻两行的刷新间隔 = 最大刷新间隔时间 ÷ 行数
- 每个多长时间刷新一行(15.6 μs) = 时间间隔(2ms)/行数(128)
小结:
DRAM的刷新要注意的问题:
- 刷新对CPU是透明的。
- 每一行中各记忆单元同时被刷新,故刷新操作时仅需要行地址,不需要列地址。
- 刷新操作类似于读出操作,但不需要信息输出。另外,刷新时不需要加片选信号,即整个存储器中的所有芯片同时被刷新。
- 因为所有芯片同时被刷新,所以在考虑刷新问题时,应当从单个芯片的存储容量着手,而不是从整个存储器的容量着手。
3. 动态RAM和静态RAM的比较
| DRAM(主存) | SRAM(缓存) | |
|---|---|---|
| 存储原理 | 电容 | 触发器 |
| 集成度 | 高 | 低 |
| 芯片引脚 | 少 | 多 |
| 功耗 | 小 | 大 |
| 价格 | 低 | 高 |
| 速度 | 慢 | 快 |
| 刷新 | 有 | 无 |
哪有什么胜利可言,坚持意味着一切。如想使用请备注转载链接~

 浙公网安备 33010602011771号
浙公网安备 33010602011771号