
2024 jscpc B题 Area of the Devil 题解
1.2024 jscpc B题 Area of the Devil 题解
2.2024 jscpc E题 Divide题解3."华为智联杯"无线程序设计大赛 B题 异或和之和题解4.[SNCPC2024] 2024 年陕西省大学生程序设计 J题猜质数II 题解题目链接:Area of the Devil
算不在题目说的区域内的面积,直接算是比较麻烦的,这里给一个朋友直接算画的图,其实画出区域以后也算好算,当然官解提到的容斥去算更好写。
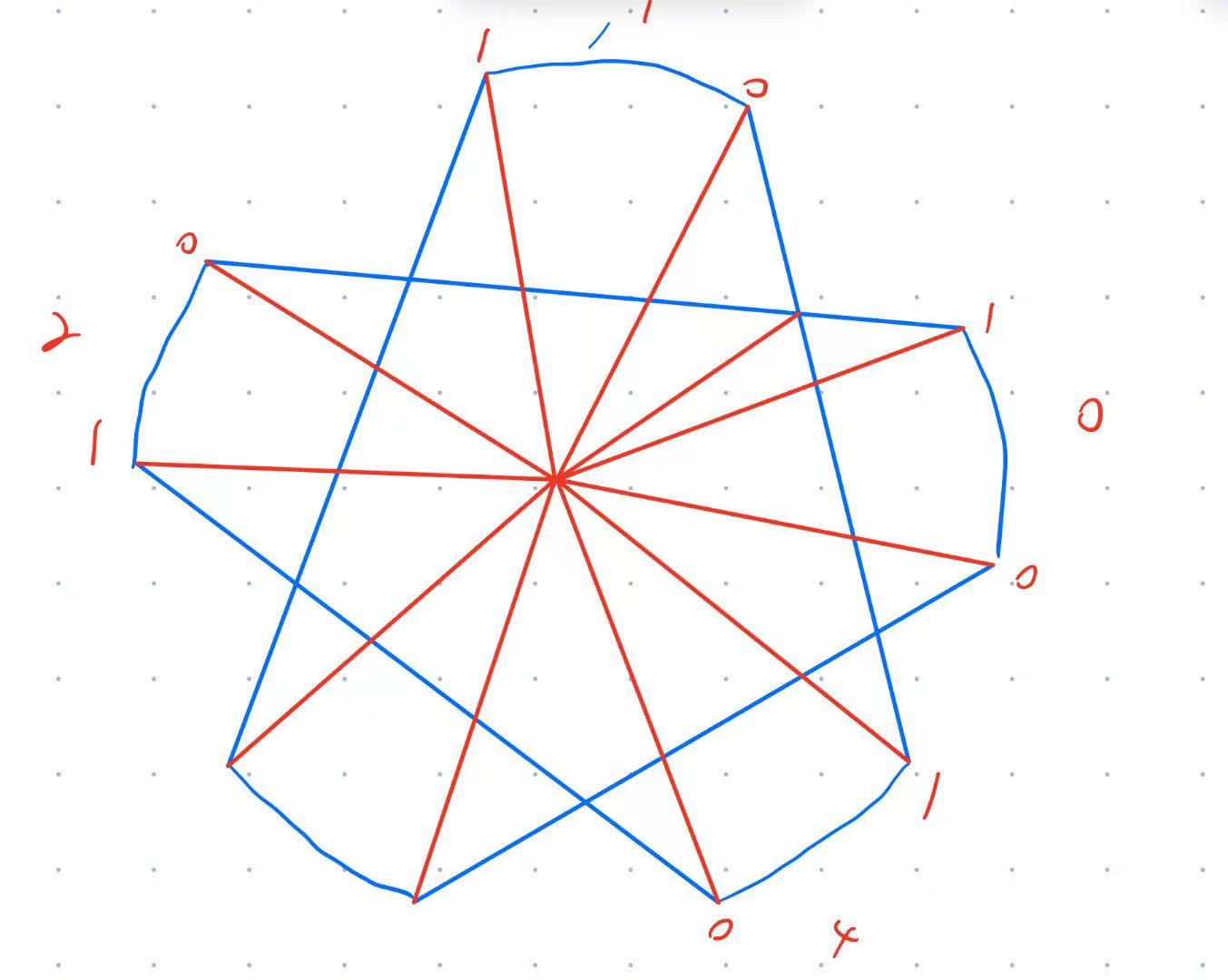

一共有五个空余的区域,我们考虑这五个区域怎么计算,图一是直接画出的所有区域的并集,图二则是五角星处于边界情况时,图上的三角形+弓形 即为某一块的未入并集区域,即非魔鬼区域。算出交点以后,就是最基本的初高中数学问题了,三角形面积可以用矢量来算,弓形面积的话,初中问题,圆心固定的,然后改为算对应的扇形-三角形即可,由于题目给出了夹角度数,所以可以考虑直接使用正弦定理算面积。稍微注意下边界怎么取的,结合图一图二,我们发现,从左往右依次数四个点,前两个取圆弧起点,另外两个取圆弧终点,然后交叉匹配就是组成的区域和直线了。尽量用矢量做计算,如果算出直线方程,可能直线斜率不存在,所以尽量用矢量计算交点。
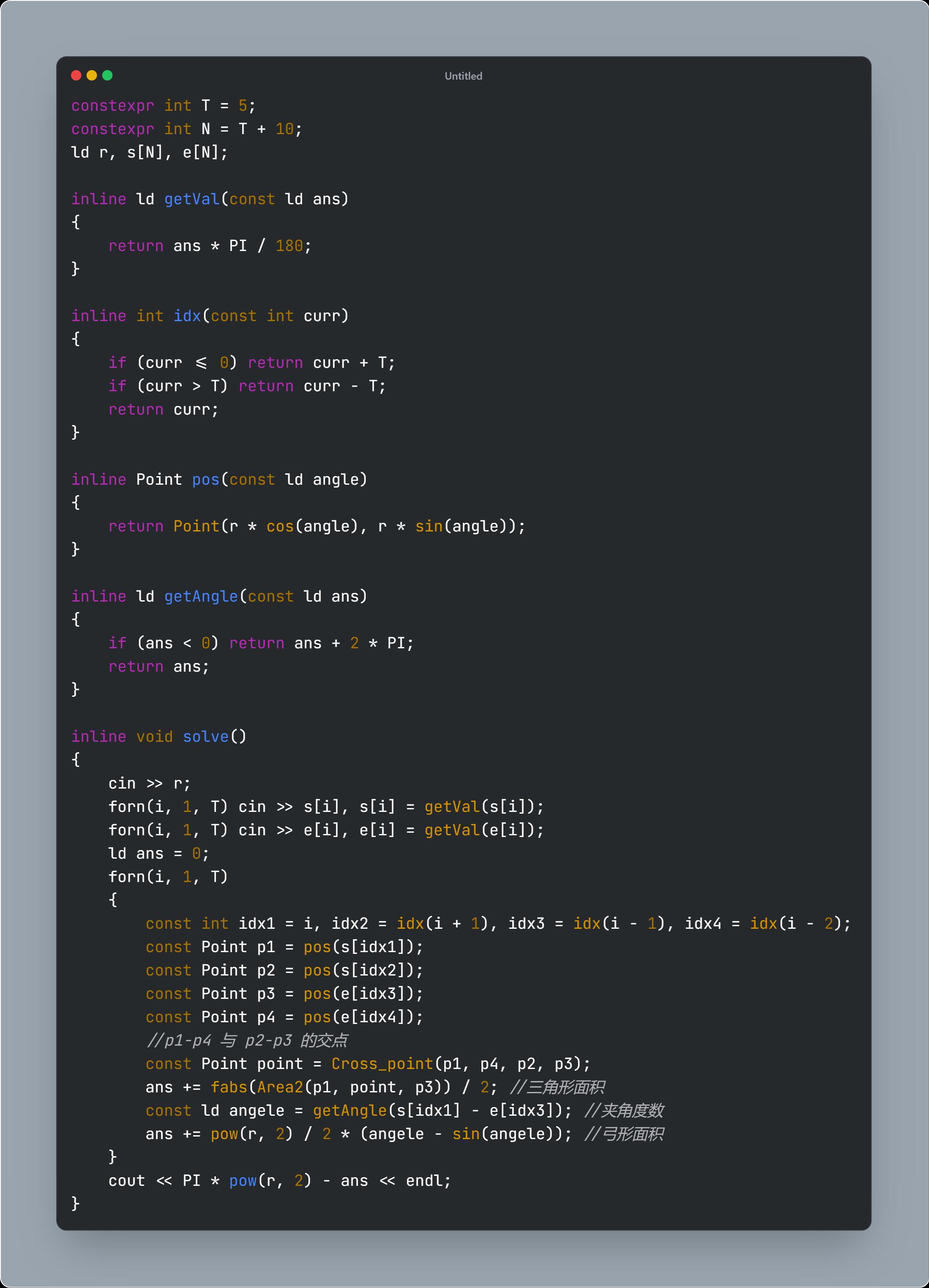
参照代码
#include <bits/stdc++.h> // #pragma GCC optimize(2) // #pragma GCC optimize("Ofast,no-stack-protector,unroll-loops,fast-math") // #pragma GCC target("sse,sse2,sse3,ssse3,sse4.1,sse4.2,avx,avx2,popcnt,tune=native") // #define isPbdsFile #ifdef isPbdsFile #include <bits/extc++.h> #else #include <ext/pb_ds/priority_queue.hpp> #include <ext/pb_ds/hash_policy.hpp> #include <ext/pb_ds/tree_policy.hpp> #include <ext/pb_ds/trie_policy.hpp> #include <ext/pb_ds/tag_and_trait.hpp> #include <ext/pb_ds/hash_policy.hpp> #include <ext/pb_ds/list_update_policy.hpp> #include <ext/pb_ds/assoc_container.hpp> #include <ext/pb_ds/exception.hpp> #include <ext/rope> #endif using namespace std; using namespace __gnu_cxx; using namespace __gnu_pbds; typedef long long ll; typedef long double ld; typedef pair<int, int> pii; typedef pair<ll, ll> pll; typedef tuple<int, int, int> tii; typedef tuple<ll, ll, ll> tll; typedef unsigned int ui; typedef unsigned long long ull; #define hash1 unordered_map #define hash2 gp_hash_table #define hash3 cc_hash_table #define stdHeap std::priority_queue #define pbdsHeap __gnu_pbds::priority_queue #define sortArr(a, n) sort(a+1,a+n+1) #define all(v) v.begin(),v.end() #define yes cout<<"YES" #define no cout<<"NO" #define Spider ios_base::sync_with_stdio(false);cin.tie(nullptr);cout.tie(nullptr); #define MyFile freopen("..\\input.txt", "r", stdin),freopen("..\\output.txt", "w", stdout); #define forn(i, a, b) for(int i = a; i <= b; i++) #define forv(i, a, b) for(int i=a;i>=b;i--) #define ls(x) (x<<1) #define rs(x) (x<<1|1) #define endl '\n' //用于Miller-Rabin [[maybe_unused]] static int Prime_Number[13] = {0, 2, 3, 5, 7, 11, 13, 17, 19, 23, 29, 31, 37}; template <typename T> int disc(T* a, int n) { return unique(a + 1, a + n + 1) - (a + 1); } template <typename T> T lowBit(T x) { return x & -x; } template <typename T> T Rand(T l, T r) { static mt19937 Rand(time(nullptr)); uniform_int_distribution<T> dis(l, r); return dis(Rand); } template <typename T1, typename T2> T1 modt(T1 a, T2 b) { return (a % b + b) % b; } template <typename T1, typename T2, typename T3> T1 qPow(T1 a, T2 b, T3 c) { a %= c; T1 ans = 1; for (; b; b >>= 1, (a *= a) %= c) if (b & 1) (ans *= a) %= c; return modt(ans, c); } template <typename T> void read(T& x) { x = 0; T sign = 1; char ch = getchar(); while (!isdigit(ch)) { if (ch == '-') sign = -1; ch = getchar(); } while (isdigit(ch)) { x = (x << 3) + (x << 1) + (ch ^ 48); ch = getchar(); } x *= sign; } template <typename T, typename... U> void read(T& x, U&... y) { read(x); read(y...); } template <typename T> void write(T x) { if (typeid(x) == typeid(char)) return; if (x < 0) x = -x, putchar('-'); if (x > 9) write(x / 10); putchar(x % 10 ^ 48); } template <typename C, typename T, typename... U> void write(C c, T x, U... y) { write(x), putchar(c); write(c, y...); } template <typename T11, typename T22, typename T33> struct T3 { T11 one; T22 tow; T33 three; bool operator<(const T3 other) const { if (one == other.one) { if (tow == other.tow) return three < other.three; return tow < other.tow; } return one < other.one; } T3() { one = tow = three = 0; } T3(T11 one, T22 tow, T33 three) : one(one), tow(tow), three(three) { } }; template <typename T1, typename T2> void uMax(T1& x, T2 y) { if (x < y) x = y; } template <typename T1, typename T2> void uMin(T1& x, T2 y) { if (x > y) x = y; } namespace Geometry2D { //精度 constexpr ld EXP = 1e-12; //Π const ld PI = acos(-1.0); ld sign(const ld x) { if (!fabs(x)) return 0; return x / fabs(x); } struct Point { ld x, y; Point() = default; Point(const ld x, const ld y) : x(x), y(y) { }; Point operator+(const Point other) const { return Point(x + other.x, y + other.y); } Point operator-(const Point other) const { return Point(x - other.x, y - other.y); } Point operator*(const ld k) const { return Point(x * k, y * k); } Point operator/(const ld k) const { return Point(x / k, y / k); } bool operator==(const Point other) const { return fabs(x - other.x) < EXP && fabs(y - other.y) < EXP; } bool operator<(const Point other) const { return x != other.x ? x < other.x : y < other.y; } }; //两点距离 inline ld Distance(const Point x, const Point y) { return hypot(x.x - y.x, x.y - y.y); } typedef Point Vector; //点乘 inline ld Dot(const Vector A, const Vector B) { return A.x * B.x + A.y * B.y; } //模长 inline ld Len(const Vector A) { return sqrt(Dot(A, A)); } //模长平方 inline ld Len2(const Vector A) { return Dot(A, A); } //两向量夹角度数 inline ld Angle(const Vector A, const Vector B) { return acos(Dot(A, B) / Len(A) / Len(B)); } //叉乘 inline ld Cross(const Vector A, const Vector B) { return A.x * B.y - A.y * B.x; } //三点构成的平行四边形面积 inline ld Area2(const Point A, const Point B, const Point C) { return Cross(B - A, C - A); } //逆时针旋转度数 inline Vector Rotate(const Vector A, const ld rad) { return Vector(A.x * cos(rad) - A.y * sin(rad), A.x * cos(rad) + A.y * sin(rad)); } //法向量的单位向量 inline Vector Normal(const Vector A) { return Vector(-A.y / Len(A), A.x / Len(A)); } //叉乘检验两向量是否重合 inline bool Parallel(const Vector A, const Vector B) { return fabs(Cross(A, B)) < EXP; } struct Line { Point p1, p2; Line() = default; //两点式 Line(const Point& p1, const Point& p2) : p1(p1), p2(p2) { } //点斜式 Line(const Point& p, const ld angle) { p1 = p, p2 = p1 + (fabs(angle - PI / 2) < EXP ? Point(0, 1) : Point(1, tan(angle))); } //一般式 Line(const ld a, const ld b, const ld c) { if (fabs(a) < EXP) p1 = Point(0, -c / b), p2 = Point(1, -c / b); else if (fabs(b) < EXP) p2 = Point(-c / a, 0), p2 = Point(-c / a, 1); else p1 = Point(0, -c / b), p2 = Point(1, (-c - a) / b); } }; typedef Line Segment; //点和直线的关系 inline int Point_line_relation(const Point p, const Line& v) { int c = Cross(p - v.p1, v.p2 - v.p1); if (c < 0) return 1; //p在v的左侧 if (c > 0) return 2; //p在v的右侧 return 0; //p在v上 } //点是否在线段上 inline bool Point_on_seg(const Point p, const Segment& v) { return fabs(Cross(p - v.p1, v.p2 - v.p1)) < EXP && Dot(p - v.p1, p - v.p2) <= 0; } //点到直线的距离 inline ld Dis_point_line(const Point p, const Line& v) { return fabs(Cross(p - v.p1, v.p2 - v.p1)) / Distance(v.p1, v.p2); } //点在直线上的投影 inline Point Point_line_proj(const Point p, const Line& v) { ld k = Dot(v.p2 - v.p1, p - v.p1) / Len2(v.p2 - v.p1); return v.p1 + (v.p2 - v.p1) * k; } //点关于直线的对称点 inline Point Point_line_symmetry(const Point p, const Line& v) { Point q = Point_line_proj(p, v); return Point(2 * q.x - p.x, 2 * q.y - p.y); } //点到线段的距离 inline ld Dis_point_seg(const Point p, const Segment& v) { if (Dot(p - v.p1, v.p2 - v.p1) < 0 || Dot(p - v.p2, v.p1 - v.p2) < 0) return min( Distance(p, v.p1), Distance(p, v.p2)); return Dis_point_line(p, v); } //两直线的位置关系 inline int Line_relation(const Line& v1, const Line& v2) { if (Cross(v1.p2 - v1.p1, v2.p2 - v2.p1) < EXP) { if (fabs(Point_line_relation(v1.p1, v2)) < EXP) return 1; //重合 return 0; //平行 } return 2; //相交 } //两直线交点 inline Point Cross_point(const Point a, const Point b, const Point c, const Point d) { ld s1 = Cross(b - a, c - a); ld s2 = Cross(b - a, d - a); return Point(c.x * s2 - d.x * s1, c.y * s2 - d.y * s1) / (s2 - s1); } //两条线段是否相交 inline bool Cross_segment(const Point a, const Point b, const Point c, const Point d) { ld c1 = Cross(b - a, c - a), c2 = Cross(b - a, d - a); ld d1 = Cross(d - c, a - c), d2 = Cross(d - c, b - c); return sign(c1) * sign(c2) < 0 && sign(d1) * sign(d2) < 0; //1相交 0不相交 } //点和多边形的关系 inline int Point_in_polygon(const Point pt, const Point* p, const int n) { forn(i, 0, n - 1) if (p[i] == pt) return 3; //在多边形的顶点上 forn(i, 0, n - 1) { Line v = Line(p[i], p[(i + 1) % n]); if (Point_on_seg(pt, v)) return 2; //在多边形上 } int num = 0; forn(i, 0, n - 1) { int j = (i + 1) % n; int c = sign(Cross(pt - p[i], p[i] - p[j])); int u = sign(p[i].y - pt.y); int v = sign(p[j].y - pt.y); if (c > 0 && u < 0 && v >= 0) num++; if (c < 0 && u >= 0 && v < 0) num--; } return num != 0; } //多边形面积 inline ld Polygon_area(const Point* p, const int n) { ld area = 0; forn(i, 0, n - 1) area += Cross(p[i], p[(i + 1) % n]); return area / 2; } //多边形重心 inline Point Polygon_center(const Point* p, const int n) { Point ans(0, 0); if (!Polygon_area(p, n)) return ans; forn(i, 0, n - 1) ans = ans + (p[i] + p[(i + 1) % n]) * Cross(p[i], p[(i + 1) % n]); return ans / Polygon_area(p, n) / 6; } //求凸包,返回顶点,ans为凸包的顶点 inline int Convex_hull(Point* p, int n, Point* ans) { n = unique(p, p + n) - p; sort(p, p + n); int v = 0; //下凸包 forn(i, 0, n - 1) { while (v > 1 && sign(Cross(ans[v - 1] - ans[v - 2], p[i] - ans[v - 1])) <= 0) v--; ans[v++] = p[i]; } int j = v; //求上凸包 forv(i, n - 2, 0) { while (v > j && sign(Cross(ans[v - 1] - ans[v - 2], p[i] - ans[v - 1])) <= 0) v--; ans[v++] = p[i]; } if (n > 1) v--; return v; } struct Circle { Point c; //圆心 ld r; //半径 Circle() = default; Circle(const Point c, const ld r) : c(c), r(r) { } Circle(const ld x, const ld y, const ld _r) { c = Point(x, y), r = _r; } }; //点到圆的关系 inline int Point_circle_relation(const Point p, const Circle& c) { ld dst = Distance(p, c.c); if (sign(dst - c.r) < 0) return 0; //圆内 if (sign(dst - c.r) == 0) return 1; //圆上 return 2; //圆外 } //直线和圆的关系 inline int Line_circle_relation(const Line& v, const Circle& c) { ld dst = Dis_point_line(c.c, v); if (sign(dst - c.r) < 0) return 0; //圆内 if (sign(dst - c.r) == 0) return 1; //圆上 return 2; //圆外 } //线段和圆的关系 inline int Seg_circle_relation(const Segment& v, const Circle& c) { ld dst = Dis_point_seg(c.c, v); if (sign(dst - c.r) < 0) return 0; //圆内 if (sign(dst - c.r) == 0) return 1; //圆上 return 2; //圆外 } //直线和圆的焦点.pa、pb是交点.返回值是交点的个数 inline int Line_cross_circle(const Line& v, const Circle& C, Point& pa, Point& pb) { if (Line_circle_relation(v, C) == 2) return 0; //无交点 Point q = Point_line_proj(C.c, v); //圆心在直线上的投影点 double d = Dis_point_line(C.c, v); //圆心到直线距离 double k = sqrt(C.r * C.r - d * d); if (sign(k) == 0) { //一个交点 pa = q; pb = q; return 1; } Point n = (v.p2 - v.p1) / Len(v.p2 - v.p1); //单位向量 pa = q + n * k; pb = q - n * k; return 2; //两个交点 } inline Point circle_center(const Point a, const Point b, const Point c) { Point center; ld a1 = b.x - a.x, b1 = b.y - a.y, c1 = (a1 * a1 + b1 * b1) / 2; ld a2 = c.x - a.x, b2 = c.y - a.y, c2 = (a2 * a2 + b2 * b2) / 2; ld d = a1 * b2 - a2 * b1; center.x = a.x + (c1 * b2 - c2 * b1) / d; center.y = a.y + (a1 * c2 - a2 * c1) / d; return center; } //最小覆盖圆 inline void min_cover_circle(Point* p, const int n, Point& c, ld& r) { random_shuffle(p, p + n); c = p[0], r = 0; forn(i, 1, n - 1) { if (sign(Distance(p[i], c) - r) > 0) { c = p[i], r = 0; forn(j, 0, i - 1) { if (sign(Distance(p[j], c) - r) > 0) { c.x = (p[i].x + p[j].x) / 2; c.y = (p[i].y + p[j].y) / 2; r = Distance(p[j], c); forn(k, 0, j - 1) { if (sign(Distance(p[k], c) - r) > 0) { c = circle_center(p[i], p[j], p[k]); r = Distance(p[i], c); } } } } } } } } namespace Geometry3D { //精度 constexpr ld eps = 1e-12; //Π const ld PI = acos(-1.0); ld sgn(const ld x) { if (!fabs(x)) return 0; return x / fabs(x); } ////三维:点 struct Point3 { ld x{}, y{}, z{}; Point3() = default; Point3(const ld x, const ld y, const ld z) : x(x), y(y), z(z) { } Point3 operator+(const Point3 B) const { return Point3{x + B.x, y + B.y, z + B.z}; } Point3 operator-(const Point3 B) const { return Point3{x - B.x, y - B.y, z - B.z}; } Point3 operator*(const double k) const { return Point3{x * k, y * k, z * k}; } Point3 operator/(const double k) const { return Point3{x / k, y / k, z / k}; } bool operator==(const Point3 B) const { return sgn(x - B.x) == 0 && sgn(y - B.y) == 0 && sgn(z - B.z) == 0; } }; typedef Point3 Vector3; //点积.和二维点积函数同名.C++允许函数同名 inline ld Dot(const Vector3& A, const Vector3& B) { return A.x * B.x + A.y * B.y + A.z * B.z; } //叉积 inline Vector3 Cross(const Vector3& A, const Vector3& B) { return Point3{A.y * B.z - A.z * B.y, A.z * B.x - A.x * B.z, A.x * B.y - A.y * B.x}; } inline ld Len(const Vector3& A) { return sqrt(Dot(A, A)); } //向量的长度 inline ld Len2(const Vector3& A) { return Dot(A, A); } //向量长度的平方 //A、B的距离 inline ld Distance(const Point3& A, const Point3& B) { return sqrt((A.x - B.x) * (A.x - B.x) + (A.y - B.y) * (A.y - B.y) + (A.z - B.z) * (A.z - B.z)); } //A与B的夹角 inline ld Angle(const Vector3& A, const Vector3& B) { return acos(Dot(A, B) / Len(A) / Len(B)); } //三维:线 struct Line3 { Point3 p1, p2; Line3() = default; Line3(const Point3& p1, const Point3& p2) : p1(p1), p2(p2) { } }; typedef Line3 Segment3; //定义线段,两端点是Point p1,p2 //三维:三角形面积的两倍 inline ld Area2(const Point3& A, const Point3& B, const Point3& C) { return Len(Cross(B - A, C - A)); } //三维:点到直线的距离 inline ld Dis_point_line(const Point3& p, const Line3& v) { return Len(Cross(v.p2 - v.p1, p - v.p1)) / Distance(v.p1, v.p2); } //三维:点在直线上 inline bool Point_line_relation(const Point3& p, const Line3& v) { return sgn(Len(Cross(v.p1 - p, v.p2 - p))) == 0 && sgn(Dot(v.p1 - p, v.p2 - p)) == 0; } //三维:点到线段的距离 inline ld Dis_point_seg(const Point3& p, const Segment3& v) { if (sgn(Dot(p - v.p1, v.p2 - v.p1)) < 0 || sgn(Dot(p - v.p2, v.p1 - v.p2)) < 0) return min( Distance(p, v.p1), Distance(p, v.p2)); return Dis_point_line(p, v); } //三维:点p在直线上的投影 inline Point3 Point_line_proj(const Point3& p, const Line3& v) { double k = Dot(v.p2 - v.p1, p - v.p1) / Len2(v.p2 - v.p1); return v.p1 + (v.p2 - v.p1) * k; } //三维:平面 struct Plane { Point3 p1, p2, p3; //平面上的三个点 Plane() = default; Plane(const Point3& p1, const Point3& p2, const Point3& p3) : p1(p1), p2(p2), p3(p3) { } }; //平面法向量 inline Point3 PVec(const Plane& f) { return Cross(f.p2 - f.p1, f.p3 - f.p1); } //四点共平面 inline bool Point_on_plane(Point3 A, Point3 B, Point3 C, const Point3& D) { return sgn(Dot(PVec({A, B, C}), D - A)) == 0; } //两平面平行 inline int Parallel(const Plane& f1, const Plane& f2) { return Len(Cross(PVec(f1), PVec(f2))) < eps; } //两平面垂直 inline int Vertical(const Plane& f1, const Plane& f2) { return sgn(Dot(PVec(f1), PVec(f2))) == 0; } //直线与平面的交点p,返回值是交点的个数 inline int Line_cross_plane(const Line3& u, const Plane& f, Point3& p) { Point3 v = PVec(f); //平面的法向量 double x = Dot(v, u.p2 - f.p1); double y = Dot(v, u.p1 - f.p1); double d = x - y; if (sgn(x) == 0 && sgn(y) == 0) return -1; //-1:v在f上 if (sgn(d) == 0) return 0; //0:v与f平行 p = (u.p1 * x - u.p2 * y) / d; //1:v与f相交 return 1; } //四面体有向面积*6 inline double volume4(const Point3& A, const Point3& B, const Point3& C, const Point3& D) { return Dot(Cross(B - A, C - A), D - A); } } namespace Matrix { constexpr int NNN = 101; ll MOD = 1e9 + 7; struct Matrix { ll a[NNN][NNN]; Matrix operator*(const Matrix& other) const { Matrix ans; memset(ans.a, 0, sizeof ans.a); forn(i, 1, NNN - 1) forn(j, 1, NNN - 1) forn(k, 1, NNN - 1) ans.a[i][j] = modt( ans.a[i][j] + a[i][k] * other.a[k][j] % MOD, MOD); return ans; } }; inline Matrix qpow(Matrix curr, ll k) { Matrix ans; memset(ans.a, 0, sizeof ans.a); forn(i, 1, NNN - 1) ans.a[i][i] = 1; for (; k; k >>= 1, curr = curr * curr) if (k & 1) ans = ans * curr; return ans; } } namespace SuffixArray { constexpr int N = 1e6 + 10; //数组大小 constexpr int BUKSize = 128; //初始桶的个数 int sa[N], rnk[N], h[N]; //后缀数组 char s[N]; //字符串 int n; //字符串长 //两个类型 enum STR { L, S }; //判断是否是LMS,当前位为S型,左边一位为L型 bool isLMS(auto type, int pos) { return !(pos == 0 || type[pos] != STR::S || type[pos - 1] != STR::L); } //判断是否是相等的LMS bool isSameLMS(auto str, auto type, const int i, const int j) { if (i == -1 || j == -1) return false; int k = -1; while (true) { ++k; if (str[i + k] != str[j + k] || type[i + k] != type[j + k]) return false; //如果对应字符不等,或者类型不等 if (k == 0) continue; if (isLMS(type, i + k) != isLMS(type, j + k)) return false; if (isLMS(type, i + k)) return true; } } //诱导排序LLLLLSSSSSS void inSort(auto str, auto len, auto type, auto LMS, auto lmsSize, const int currBukSize) { auto buck = new int[currBukSize]; //桶 auto pre = new int[currBukSize]; //桶前缀和 memset(buck, 0, sizeof(buck[0]) * currBukSize); memset(pre, 0, sizeof(pre[0]) * currBukSize); memset(sa, -1, sizeof(int) * len); forn(i, 0, len - 1) ++buck[str[i]]; //字符分桶 pre[0] = buck[0]; forn(i, 1, currBukSize - 1) pre[i] = pre[i - 1] + buck[i]; //前缀和 //先处理LMS(特殊的S型)到S桶里 forv(i, lmsSize - 1, 0) sa[--pre[str[LMS[i]]]] = LMS[i]; //正逆序扫,分S型和L型两种桶进行排序SSSSSSLLLLLLLL //顺序处理L型 pre[0] = 0; forn(i, 1, currBukSize - 1) pre[i] = pre[i - 1] + buck[i - 1]; forn(i, 0, len - 1) if (sa[i] > 0 && type[sa[i] - 1] == STR::L) sa[pre[str[sa[i] - 1]]++] = sa[i] - 1; //逆序处理S型 pre[0] = buck[0]; forn(i, 1, currBukSize - 1) pre[i] = pre[i - 1] + buck[i]; //前缀和 forv(i, len - 1, 0) if (sa[i] > 0 && type[sa[i] - 1] == STR::S) sa[--pre[str[sa[i] - 1]]] = sa[i] - 1; delete[] buck; delete[] pre; } //SA-IS void SA_IS(auto str, int len, auto LMS, int currBukSize) { auto type = new STR[N + 1]; //默认最后增加一个字符'#'比任何字符小,所以最后一个字符为S型 //处理类型 //前后相等用性质否则用定义 type[len - 1] = STR::S; forv(i, len - 2, 0) type[i] = str[i] == str[i + 1] ? type[i + 1] : str[i] < str[i + 1] ? STR::S : STR::L; int lmsSize = 0; forn(i, 0, len - 1) if (isLMS(type, i)) LMS[lmsSize++] = i; inSort(str, len, type, LMS, lmsSize, currBukSize); //诱导排序S型和L型 int pre = -1; //上一个sa[i] int cnt = 0; auto tmp = new int[len]; //临时存值数组 //记录还无法确定次序的LMS数组,还未确定次序就递归排序 forn(i, 0, len - 1) { if (!isLMS(type, sa[i])) continue; if (!isSameLMS(str, type, pre, sa[i])) ++cnt; tmp[sa[i]] = cnt - 1; pre = sa[i]; } auto nxtStr = new int[lmsSize]; lmsSize = 0; //记录LMS forn(i, 0, len - 1) { if (!isLMS(type, i)) continue; nxtStr[lmsSize++] = tmp[i]; } delete[] tmp; auto nxtLMS = new int[lmsSize]; if (cnt < lmsSize) SA_IS(nxtStr, lmsSize, nxtLMS, cnt); else forn(i, 0, lmsSize - 1) sa[nxtStr[i]] = i; delete[] nxtStr; forn(i, 0, lmsSize - 1) nxtLMS[i] = LMS[sa[i]]; inSort(str, len, type, nxtLMS, lmsSize, currBukSize); delete[] nxtLMS; delete[] type; } inline void init(const int len) { n = len; auto LMS = new int[n]; //加一个字符'#' SA_IS(s, n + 1, LMS, BUKSize); delete[] LMS; forn(i, 0, n - 1) sa[i] = sa[i + 1] + 1; forv(i, n - 1, 0) swap(sa[i], sa[i + 1]), swap(s[i], s[i + 1]); sa[0] = sa[n + 1] = 0; } void get_h() { forn(i, 1, n) rnk[sa[i]] = i; for (int i = 1, k = 0; i <= n; i++) { if (rnk[i] == 1) continue; if (k) k--; //大于等于上一个后缀的h-1 int ear = sa[rnk[i] - 1]; //上一个后缀 while (i + k <= n && ear + k <= n && s[i + k] == s[ear + k]) k++; h[rnk[i]] = k; } } inline void clear() { forn(i, 0, n) sa[i] = rnk[i] = h[i] = 0; forn(i, 0, n) s[i] = '\0'; } } using namespace Geometry2D; // using namespace Geometry3D; // using namespace Matrix; // using namespace SuffixArray; constexpr int T = 5; constexpr int N = T + 10; ld r, s[N], e[N]; inline ld getVal(const ld ans) { return ans * PI / 180; } inline int idx(const int curr) { if (curr <= 0) return curr + T; if (curr > T) return curr - T; return curr; } inline Point pos(const ld angle) { return Point(r * cos(angle), r * sin(angle)); } inline ld getAngle(const ld ans) { if (ans < 0) return ans + 2 * PI; return ans; } inline void solve() { cin >> r; forn(i, 1, T) cin >> s[i], s[i] = getVal(s[i]); forn(i, 1, T) cin >> e[i], e[i] = getVal(e[i]); ld ans = 0; forn(i, 1, T) { const int idx1 = i, idx2 = idx(i + 1), idx3 = idx(i - 1), idx4 = idx(i - 2); const Point p1 = pos(s[idx1]); const Point p2 = pos(s[idx2]); const Point p3 = pos(e[idx3]); const Point p4 = pos(e[idx4]); //p1-p4 与 p2-p3 的交点 const Point point = Cross_point(p1, p4, p2, p3); ans += fabs(Area2(p1, point, p3)) / 2; //三角形面积 const ld angele = getAngle(s[idx1] - e[idx3]); //夹角度数 ans += pow(r, 2) / 2 * (angele - sin(angele)); //弓形面积 } cout << PI * pow(r, 2) - ans << endl; } signed int main() { Spider //------------------------------------------------------ cout << fixed << setprecision(10); int test = 1; // read(test); cin >> test; forn(i, 1, test) solve(); // while (cin >> n, n)solve(); // while (cin >> test)solve(); }
单次询问时间复杂度为:
合集:
xcpc题解集1


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· Manus的开源复刻OpenManus初探
· 三行代码完成国际化适配,妙~啊~
· .NET Core 中如何实现缓存的预热?
· 如何调用 DeepSeek 的自然语言处理 API 接口并集成到在线客服系统