
DDCA —— 网络、数据中心与可靠性
 CS6810 Chapter 6. Networks, Datacenters, Reliability. 的学习笔记。
CS6810 Chapter 6. Networks, Datacenters, Reliability. 的学习笔记。
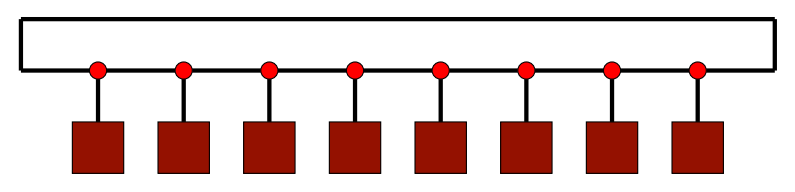
1. Ring
每个节点连接到一个
实际上,它是一个重复的总线:可以同时传输多条消息。
缺点:二等分带宽为 2,平均需要
2. 拓扑示例
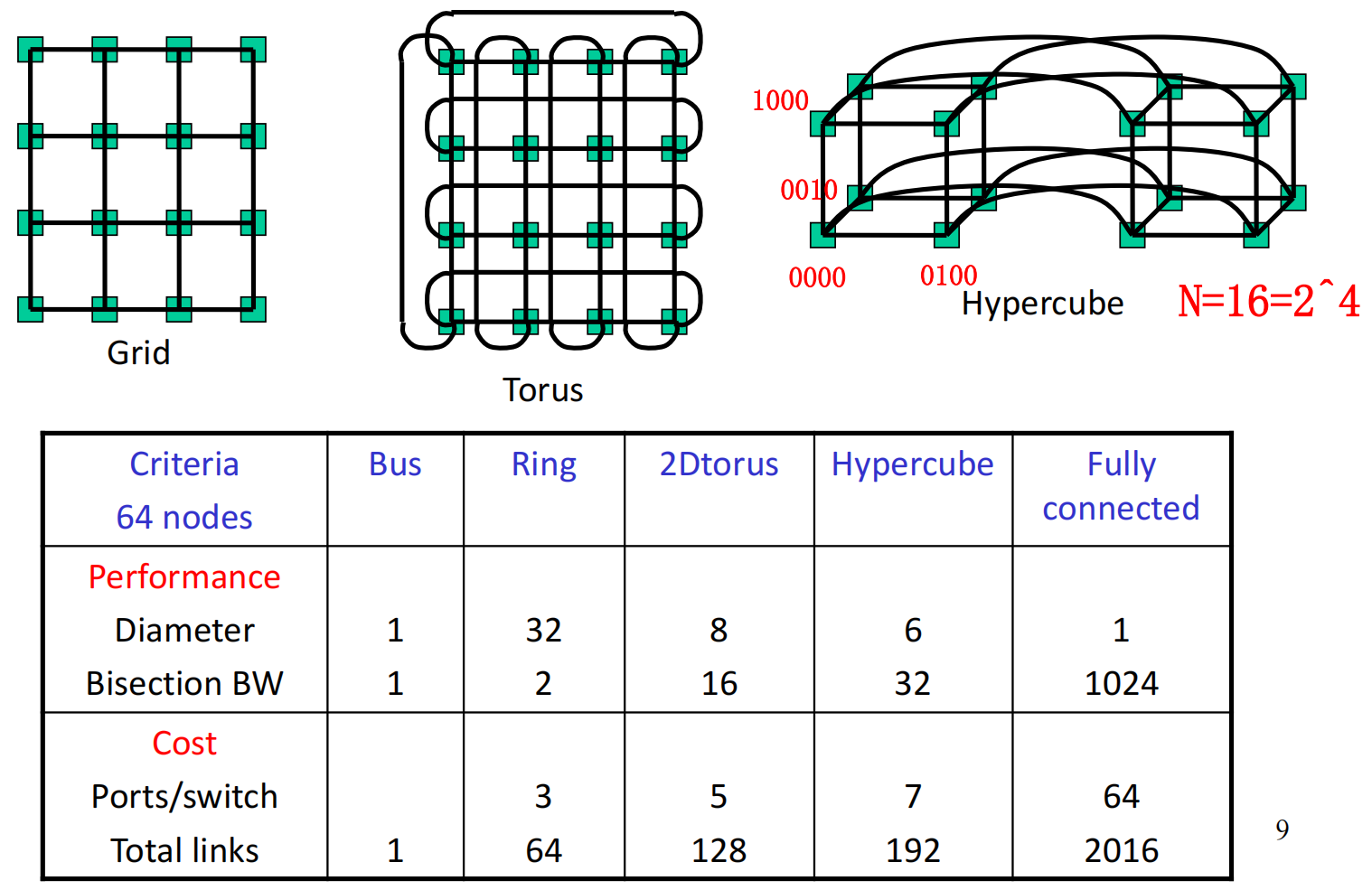
3. k-ary d-Cube
k-ary d-cube 是一个 d 维数组,每个维度包含 k 个元素。数组中两个元素如果在某一维度上的值相差 1(取模 k),则它们之间有一条连接。
节点数量:
当 Torus 为 Hypercube 为
所以该 Torus 为一个 2 维网络,该 Hypercube 为一个 6 维网络。
Torus 网络的坐标可以用 (5,6) 表示,Hypercube 网络的坐标可以用 000001 表示。
-
switch 数量:
-
switch 度数:
-
链路数量:
-
每个节点的引脚数:
-
平均路由距离:
-
直径:
-
二分带宽:
-
switch 复杂度:
对于超立方体的调整:
- 超立方体的 switch 度数、链路数量、每个节点的引脚数、二分带宽均为上述值的一半。
- 超立方体的直径和平均路由距离是上述值的两倍。
- 超立方体的交换机复杂度为
- 超立方体与 k-ary d-cube 的主要区别是,它没有左右邻居连接。
维度的取舍:
- 维度
- 优点:
- 平均路由距离
- 网络直径
- 平均路由距离
- 缺点:
- 每个交换机的度数
- 链路数量
- 二分带宽
- 每个交换机的度数
3. 互联网络
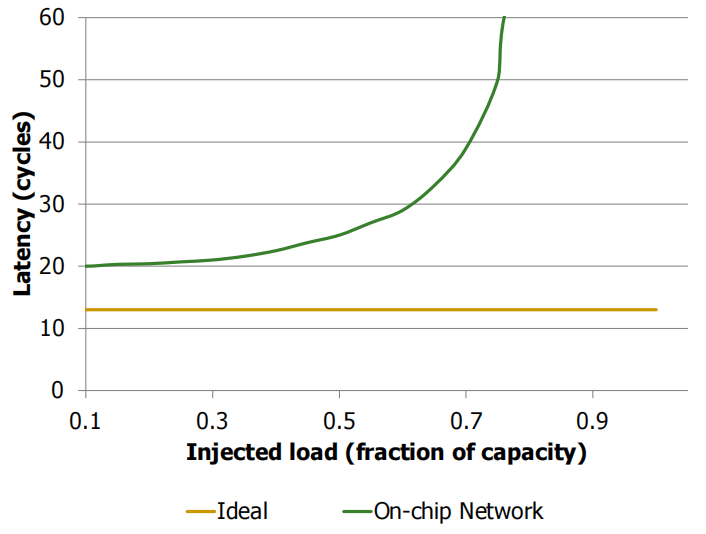
性能

横轴:Injection rate into the network,即网络负载的注入速率,也可理解为数据发送的速率。
纵轴:Latency,即数据在网络中传输所需的时间。
绿色曲线显示了随着负载(Injection Rate)的增加,网络的延迟表现。
- 在低负载下,延迟接近零负载延迟 (Zero Load Latency)。
- 随着负载增加,网络资源变得拥塞,延迟迅速上升。
- 在接近饱和吞吐量 (Saturation Throughput) 时,延迟会急剧增长。
3.1 理想延迟
仅由源节点到目的节点之间的线延迟 (Wire Delay) 决定。
-
D = 曼哈顿距离 (Manhattan Distance):
-
两个点之间的距离,沿着相互垂直的轴测量。
-
例如:在网格中,从源到目的地只能沿着水平和垂直方向移动,而不能沿对角线直接穿过。
-
-
v = 传播速度 (Propagation Velocity):信号在网络中传播的速度。
-
L = 包大小 (Packet Size):数据包的总大小。
-
b = 信道带宽 (Channel Bandwidth):信道每单位时间可以传输的数据量。
3.2 真实延迟
专用布线不切实际 (Dedicated wiring impractical)
-
在实际互连网络中,使用长距离专用布线的成本和实现难度较高,因此需要其他方法来优化布线。
-
为了克服长导线的时延问题,将长导线分成多段,每一段之间插入路由器来进行数据中继传输。
-
D = 曼哈顿距离 (Manhattan Distance)
-
v = 传播速度 (Propagation Velocity)
-
L = 包大小 (Packet Size)
-
b = 信道带宽 (Channel Bandwidth)
-
H = 跳数 (Hops):数据包在网络中从源节点到目标节点所经过的路由器数量。
-
-
3.3 负载延迟曲线
3.4 网络性能指标
数据包延迟 (Packet latency, 平均/最大)
- 平均延迟:数据包从源点到目的地的平均传输时间。
- 最大延迟:所有数据包中最长的传输时间。
往返延迟 (Round trip latency, 平均/最大)
- 请求-响应层面:指从发送请求到接收响应所需的时间。
- 缓存未命中服务时间 (Cache miss service time):当缓存未命中时,数据被获取并返回所花费的时间。
饱和吞吐量 (Saturation throughput)
- 网络在达到饱和状态时,仍然能够维持的最大数据传输速率。
应用级性能 (Application-level performance)
- 执行时间 (Execution time):应用程序完成其任务所需的时间。
系统性能 (System performance)
- 作业吞吐量 (Job throughput):系统在单位时间内能够完成的任务数量。
- 受到线程/应用之间干扰的影响 (Affected by interference among threads/applications):不同线程或应用之间的资源争用会影响整体系统性能。
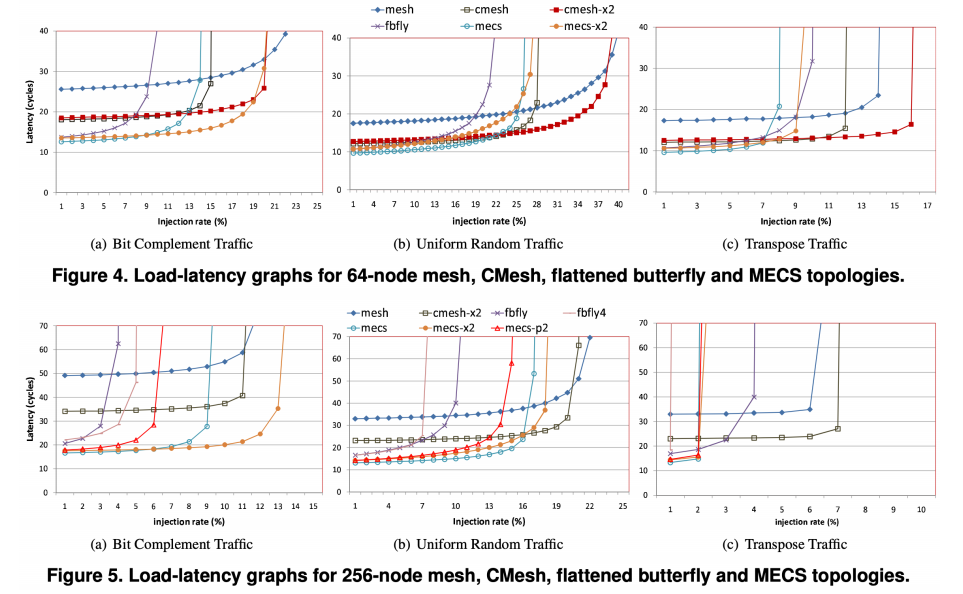
4. On-Chip Networks
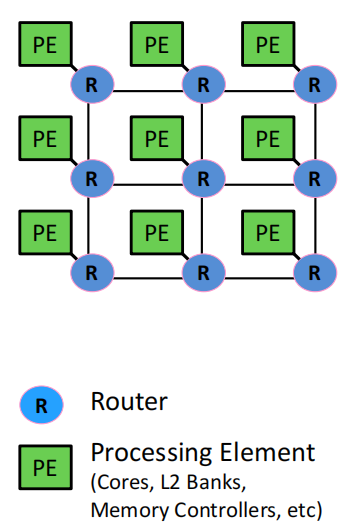
连接核心、缓存、内存控制器等:主要目标是将处理核心、缓存和内存控制器等模块连接起来。
总线和交叉开关不具备可扩展性:传统的总线(Bus)和交叉开关(Crossbar)结构在规模增大时会遇到性能瓶颈,不适用于大规模片上网络。
通常采用分组交换(Packet Switched):数据在网络中通过分组的方式进行传输,而不是传统的电路交换。
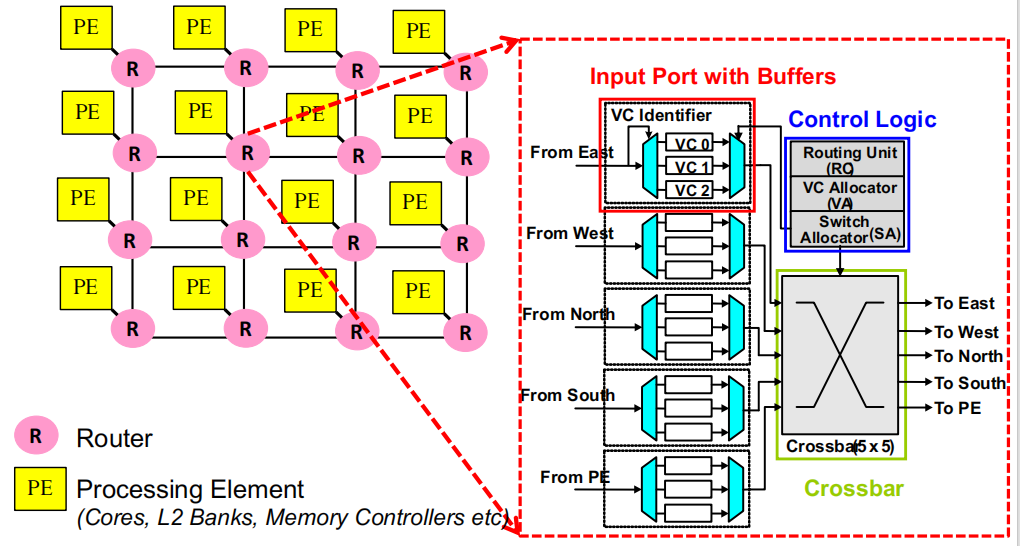
二维网格(2D Mesh):常用的拓扑结构:2D网格是片上网络中最常用的拓扑结构,简单且易于实现。
XY路由与FIFO或轮询端口仲裁常见:
- XY路由:数据先沿X轴移动,再沿Y轴移动到达目标节点。
- FIFO(先进先出)或轮询仲裁(Round Robin Port Arbitration)常用于端口资源分配。
虚拟信道缓冲常见:使用虚拟信道(Virtual Channel)来缓冲数据,有助于缓解拥塞并提高网络效率。
主要用于缓存未命中和内存请求:片上网络的主要任务是服务于缓存未命中(Cache Misses)和内存请求(Memory Requests),以加速数据传输。
4.1 On-Chip vs. Off-Chip Interconnects(片上互连与片外互连的比较)
- 片上互连的优势
- 核心之间的低延迟
- 没有引脚限制
- 丰富且低功耗的布线资源
- 带宽非常高
- 全局协调更简单
- 片上互连的约束/劣势
-
2D基底限制了易于实现的拓扑结构*
-
能量/功耗是关键问题
-
复杂算法不可取
-
大型缓冲器不可取
-
-
逻辑面积和金属层限制了布线资源的使用
- 成本对比
-
片外互连:主要成本来自通道、引脚、连接器和电缆等。
-
片上互连:主要成本是存储和交换结构(布线资源丰富)。
4. 设计趋势
- 结果:设计出带宽非常宽但缓冲较少的网络。
5. 通道特性
- 片上互连:传输距离短,延迟低。
6. 工作负载
- 片外互连:大型并行应用程序中的多芯片通信流量。
- 片上互连:多核架构下的缓存/内存通信流量。
本文作者:Astron-fjh
本文链接:https://www.cnblogs.com/Astron-fjh/p/18621120
版权声明:本作品采用知识共享署名-非商业性使用-禁止演绎 2.5 中国大陆许可协议进行许可。



【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】凌霞软件回馈社区,博客园 & 1Panel & Halo 联合会员上线
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】博客园社区专享云产品让利特惠,阿里云新客6.5折上折
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步