
CUDA编程学习 (3)——内存和数据定位
 这段文字详细介绍了CUDA编程中的内存管理和数据定位。首先,强调了GPU的内存带宽与浮点计算能力之间的关系,指出性能瓶颈主要来源于内存访问的限制。接着,通过矩阵乘法的示例,展示了如何利用共享内存提高性能,介绍了内存类型(如全局内存、常量内存、寄存器和共享内存)及其访问方式。此外,讨论了Tiling技术,通过将数据划分为小块来优化内存访问。Tiling的有效实现需要线程的同步,以确保在加载和计算阶段的正确执行。最后,文中提供了处理任意大小矩阵的方法,说明如何在矩阵乘法中避免无效计算并管理边界条件。
这段文字详细介绍了CUDA编程中的内存管理和数据定位。首先,强调了GPU的内存带宽与浮点计算能力之间的关系,指出性能瓶颈主要来源于内存访问的限制。接着,通过矩阵乘法的示例,展示了如何利用共享内存提高性能,介绍了内存类型(如全局内存、常量内存、寄存器和共享内存)及其访问方式。此外,讨论了Tiling技术,通过将数据划分为小块来优化内存访问。Tiling的有效实现需要线程的同步,以确保在加载和计算阶段的正确执行。最后,文中提供了处理任意大小矩阵的方法,说明如何在矩阵乘法中避免无效计算并管理边界条件。
1. CUDA Memories
1.1 GPU 性能如何
-
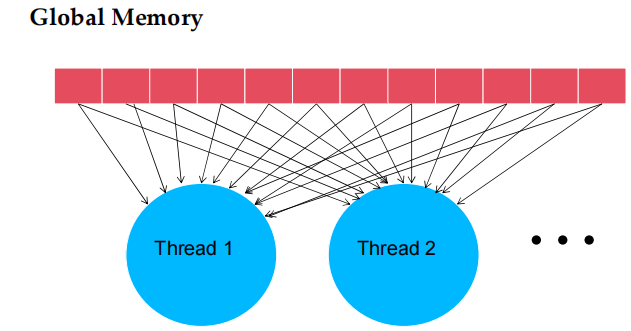
所有 thread 都会访问 global memory,以获取输入的矩阵元素
- 在执行一次浮点加法时,需要进行一次内存访问,每次访问传输 4 字节(即 32 位浮点数)
- 1 FLOP(浮点运算)对应 4 字节的内存带宽
-
假设的 GPU 性能:
- 该 GPU 的峰值浮点计算能力为 1,600 GFLOPS(十亿次浮点运算/秒),内存带宽为 600 GB/s
- 理论上,若要达到 1,600 GFLOPS 的峰值计算能力,需要 4*1,600 = 6,400 GB/s 的内存带宽,但实际内存带宽只有 600 GB/s
-
性能瓶颈:由于内存带宽的限制,实际执行速度只能达到 150 GFLOPS,这仅仅是 GPU 峰值浮点性能的 9.3%(150/1600)
-
减少内存访问:为了接近 GPU 的 1,600 GFLOPS 峰值性能,必须大幅减少对内存的访问量。
1.2 示例——矩阵乘法

__global__ void MatrixMulKernel(float* M, float* N, float* P, int Width){
// Calculate the row index of the P element and M
int Row = blockIdx.y * blockDim.y + threadIdx.y;
// Calculate the column index of P and N
int Col = blockIdx.x * blockDim.x + threadIdx.x;
if ((Row < Width) && (Col < Width)) {
float Pvalue = 0;
// each thread computes one element of the block sub-matrix
for (int k = 0; k < Width; ++k) {
Pvalue += M[Row * Width + k] * N[k * Width + Col];
}
P[Row * Width + Col] = Pvalue;
}
}
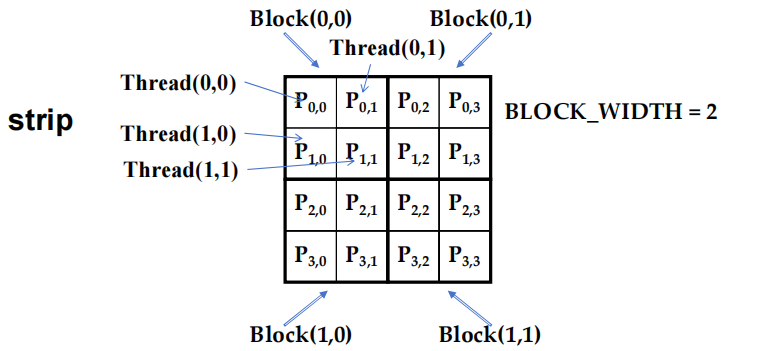
1.3 thread 到 P 的数据映射
1.4
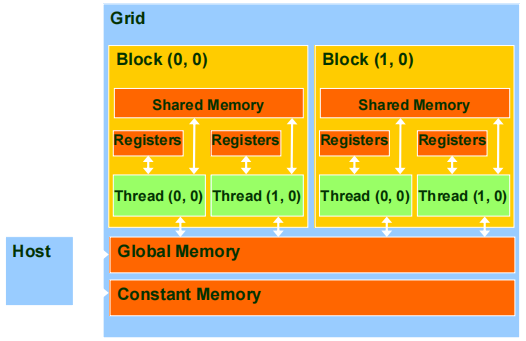
1.5 程序视角的 CUDA 内存
1.5.1 声明 CUDA 变量
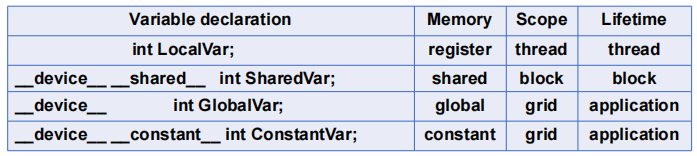
- 当与
__shared__或__constant__一起使用时,__device__是可选项 - 自动变量(automatic variables)位于 register 中
- 除位于 global memory 中的 per-thread 数组外
Shared Memory 变量声明:
void blurKernel(unsigned char* in, unsigned char* out, int w, int h){
__shared__ float ds_in[TILE_WIDTH][TILE_WIDTH];
}
1.5.2 在何处声明变量
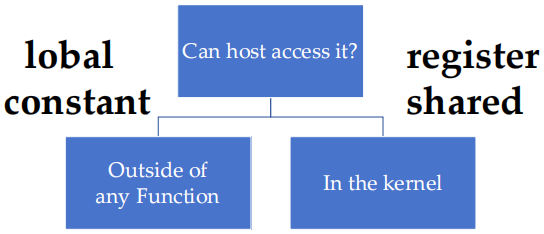
-
全局(global)声明:在任何函数外部声明的变量,通常是 global memory,可以被所有 thread 访问。host 不能直接访问这些变量,需要通过 device 端操作。
-
常量(constant)声明:同样是在函数外部声明,但这些变量是只读的,并且通常用于需要在 device 的多个 thread 中共享不变的数据。host 可以访问常量内存,通过
cudaMemcpyToSymbol等函数将数据从主机拷贝到常量内存。 -
寄存器(register)声明:在 kernel 函数内部声明,存储在 register 中,属于每个 thread 的私有变量,访问速度非常快。host 不能访问 register 变量。
-
共享内存(shared)声明:在 kernel 函数内部声明的共享内存,存储在 device 上,可以被同一个 block 中的所有 thread 共享。host 无法直接访问共享内存,只在 device block 内部有效。
1.5.3 CUDA 中的共享内存(Shared Memory)
一种特殊类型的内存,其内容在 kernel 源代码中显式定义并使用
- 每个 SM(流式多处理器)有一份:每个流式多处理器(SM)都有一块 shared memory 供 block 使用。
- 高访问速度:与 global memory 相比,访问 shared memory 的速度(延迟和吞吐量)要快得多。
- 访问范围和共享范围:shared memory 仅在 block 之间共享,并且只能由同一个 block 内的 thread 访问。
- 生命周期:shared memory 的生命周期仅限于 block,当 block 执行完毕后,内存内容就会消失。
- 通过加载/存储指令访问:shared memory 通过显式的内存加载和存储指令进行访问。
- Scratchpad memory:在计算机架构中,shared memory 可以视为一种临时存储区域,类似于 scratchpad memory。
2. Tiled 并行算法
- 基本矩阵乘法 kernel 的 global memory 访问模式
- 在拥堵的交通系统中,大幅减少车辆数量可以显著改善所有车辆的延迟
- 为通勤者提供拼车服务
- Tiling 用于 global memory 访问
- 驾驶员 = 访问其内存数据操作数的 thread
- 汽车 = 内存访问请求

2.1 Tiling 的挑战
-
有些拼车可能比其他拼车更容易:有些计算任务的 Tiling 更容易,而有些则较难
-
拼车的参与者需要有类似的工作时间表:就像拼车中的乘客需要有相似的时间安排一样,在 thread 并行处理中,任务需要有相似的计算特征或数据访问模式才能有效使用 Tiling
-
拼车需要同步
-
Good:当人们的日程安排相似时
-

- Bad:当人们的日程安排大相径庭时
-

-
-
Tiling 也是一样
- Good:当 thread 具有相似的访问时序时
- Bad:当 thread 的时间非常不同时
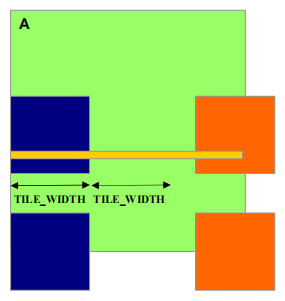
2.2 Tiling 技术概要
- 识别一个由多个 thread 访问的 global memory tile:找到 global memory 中的一个 tile 数据,这个 tile 数据将会被多个 thread 同时访问
- 将这个 tile 从 global memory 加载到片上 memory:把这个 tile 数据从 global memory 中移到片上更快的memory(如shared memory)中
- 使用屏障同步确保所有 thread 都准备好开始当前阶段:通过同步机制,确保所有 thread 都达到了一个同步点,准备好下一步操作
- 让多个 thread 从片上 memory 中访问它们的数据:所有 thread 从这个更快速的片上 memory 中读取数据,避免重复访问慢速的 global memory
- 再次使用屏障同步确保所有 thread 完成当前阶段:确保所有 thread 都完成了当前阶段的工作,避免提前进入下一步
- **继续处理下一个 tile **:一旦当前 tile 的处理完成,重复上述步骤处理下一个 tile
3. Tiled 矩阵乘法
3.1 矩阵乘法
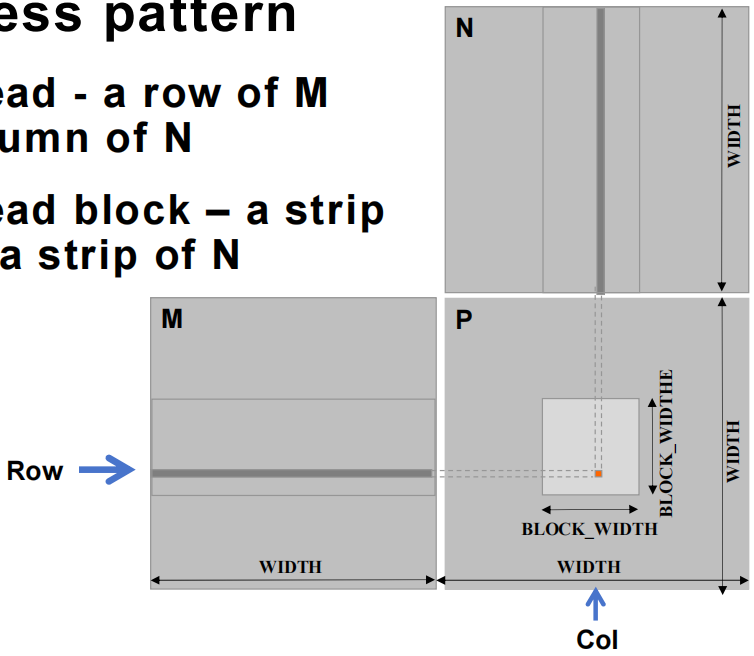
- 数据访问模式
- 每个 thread - 负责矩阵
- 每个 thread block - 负责矩阵
- 每个 thread - 负责矩阵
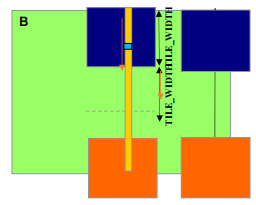
3.2 Tiled 矩阵乘法
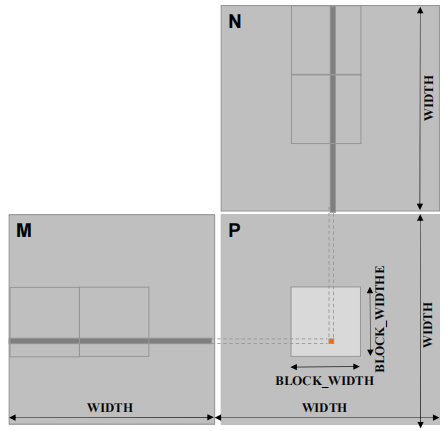
- 将每个 thread 的执行分成几个阶段
- thread block 在每个阶段的数据访问都集中在 M 的一个 tile 和 N 的一个 tile 上
- 这些 tile 的大小是每个维度中 BLOCK_SIZE 的元素数量。
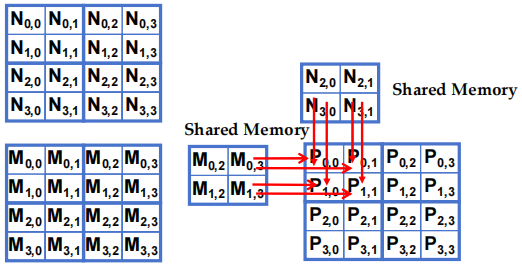
3.3 加载 Tile
- block 中的所有 thread 都参与加载:每个 block 中的所有 thread 共同完成 tile 的数据加载任务
- 每个 thread 负责加载一个 M 矩阵元素和一个 N 矩阵元素
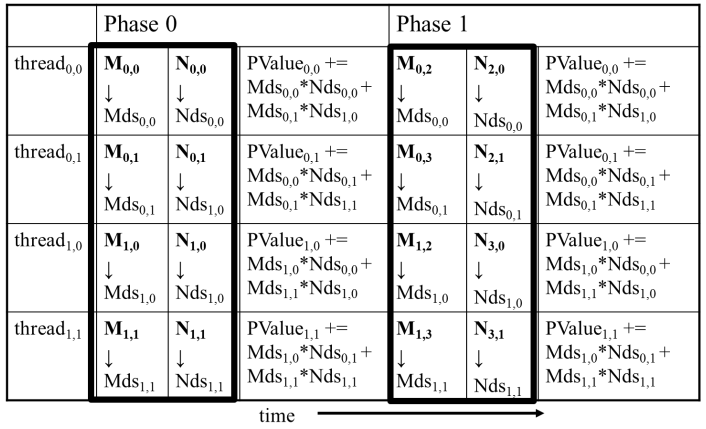
- 阶段 0 的 Block(0,0) 加载

- 阶段 0 的 Block(0,0) 计算 (iteration 0)
- 阶段 0 的 Block(0,0) 计算 (iteration 1)
- 阶段 1 的 Block(0,0) 加载
- 阶段 1 的 Block(0,0) 计算 (iteration 0)
- 阶段 1 的 Block(0,0) 计算 (iteration 1)
- 执行阶段
3.4 障碍同步(Barrier Synchronization)
同步 block 中的所有 thread:通过同步机制,确保 block 中的所有 thread 在继续执行前都处于同一进度。
-
__syncthreads():在同一个 block 中的所有 thread 必须在到达__syncthreads()后,才能继续执行后续的指令。这意味着,thread 只有在所有 thread 到达同步点时,才能同时继续。 -
最佳用法是协调分阶段执行的分 tile 算法:
__syncthreads()最适用于分 tile 算法的阶段性执行,确保所有 thread 在正确的时间协同工作。-
确保 tile 中的所有元素在每个阶段开始时被加载:使用
__syncthreads()确保在每个阶段开始时,tile 内的所有元素都已经加载完毕。 -
确保 tile 中的所有元素在每个阶段结束时被使用:使用
__syncthreads()确保在进入下一阶段之前,当前阶段的所有数据都被 thread 处理完毕。
-
4. Tiled 矩阵乘法 kernel
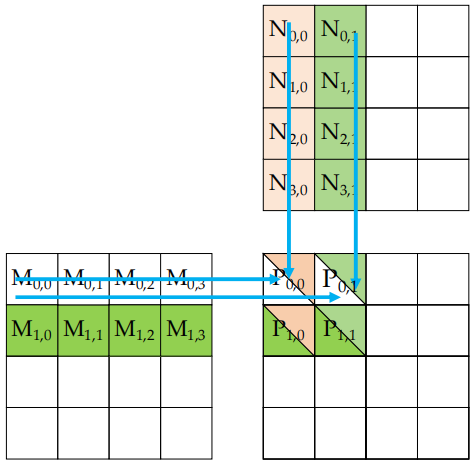
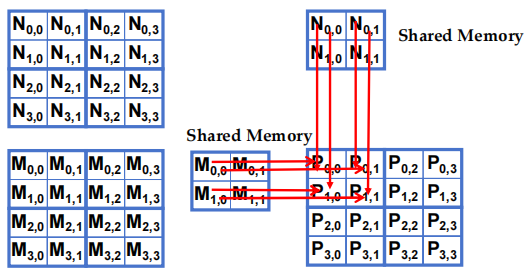
4.1加载 M、N 的输入 Tile 0(阶段 0)
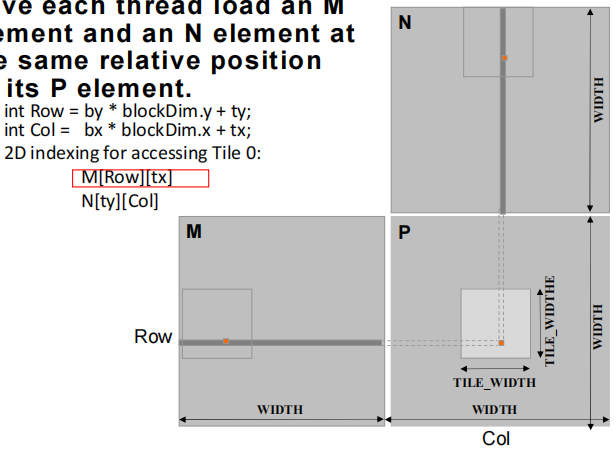
int Row = by * blockDim.y + tyint Col = bx * blockDim.x + tx- 对矩阵M:
M[Row][tx] - 对矩阵N:
N[ty][Col]
by 和 bx 是块的索引,分别对应Y和X方向的块。
blockDim.y 和 blockDim.x 是每个块中的线程数量,ty 和 tx 是线程在当前块中的局部索引。
每个 thread 从M和N矩阵中加载与其P矩阵元素相对应的元素。图示中:
- M和N的整个矩阵以方块形式显示,每个方块中的点表示 thread 正在处理的元素。
- P矩阵的一个小块正被计算,每个 thread 会从M和N中选取对应的元素来参与计算。
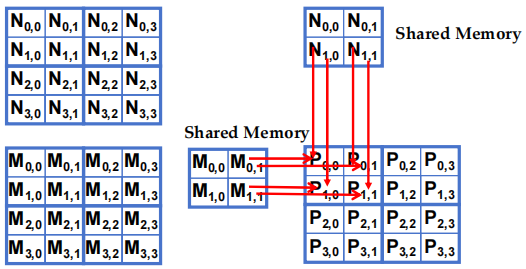
4.2 加载 M、N 的输入 Tile 1(阶段 1)
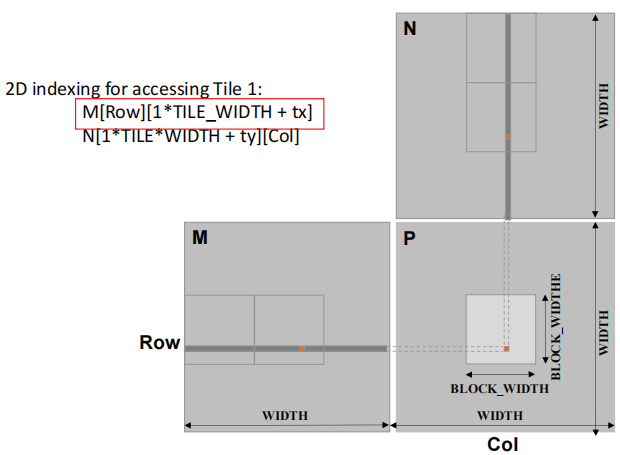
- 对矩阵M:
M[Row][1*TILE_WIDTH + tx] - 对矩阵N:
N[1*TILE_WIDTH + ty][Col]
4.3 M 和 N 是动态分配的——使用 1D 索引
M[Row][p * TILE_WIDTTH + tx]->M[Row * WIDTH + p * TILE_WIDTH + tx]N[p * TILE_WIDTH + ty][Col]->N[(p * TILE_WIDTH + ty) * WIDTH + Col]
其中,p 是当前阶段的序列号
4.4 Tiled 矩阵乘法 kernel
__global__ void MatrixMulKernel(float* M, float* N, float* P, int Width)
{
__shared__ float ds_M[TILE_WIDTH][TILE_WIDTH];
__shared__ float ds_N[TILE_WIDTH][TILE_WIDTH];
int bx = blockIdx.x;
int by = blockIdx.y;
int tx = threadIdx.x;
int ty = threadIdx.y;
int Row = by * blockDim.y + ty;
int Col = bx * blockDim.x + tx;
float Pvalue = 0;
// 循环计算 P 元素所需的 M 和 N tile
for (int p = 0; p < n/TILE_WIDTH; ++p){
// 将 M 和 N tile 协同载入 shared memory
ds_M[ty][tx] = M[Row*WIDTH + p*TILE_WIDTH + tx];
ds_N[ty][tx] = N[(p*TILE_WIDTH + ty)*WIDTH + Col];
__syncthreads();
for (int i = 0; i < TILE_WIDTH; ++i)
Pvalue += ds_M[ty][i] * ds_N[i][tx];
__synchthreads();
}
P[Row * Width + Col] = Pvalue;
}
4.5 Tile(Thread Block)大小
每个 thread block 应包含多个 thread
- 如果 TILE_WIDTH 有 16,则有
- 如果 TILE_WIDTH 有 32,则有
对于 16,在每个阶段,每个 block 从 global memory 执行
对于 32,在每个阶段,每个 block 从 global memory 执行
4.6 Shared Memory 和 Threading
对于具有 16KB shared memory 的 SM
-
shared memory 大小取决于执行情况
-
TILE_WIDTH = 16 时,每个 thread block 使用
-
对于 16KB shared memory,最多可能有 8 个 thread block 在执行
- 这允许多达
- 这允许多达
-
下一个 TILE_WIDTH 为 32,将导致每个 thread block 使用
- 然而,在 GPU 中,每个 SM 的 thread 数限制为 1536 个,因此每个 SM 的 block 数减少为一个!
每个 __syncthread() 都能减少一个 block 的活动 thread 数
- 更多的 thread blocks 可能更有优势
5. 在 Tiled 算法中处理任意大小矩阵
5.1 处理任意大小的矩阵
到目前为止,我们介绍的 tiled 矩阵乘法 kernel 只能处理尺寸(Width)是 tile 宽度(TILE_WIDTH)倍数的正方形矩阵。
- 然而,实际应用需要处理任意大小的矩阵。
- 我们可以将 row 和 column 填充(添加元素)为 tile 大小的倍数,但这将产生巨大的空间和数据传输时间开销。我们将采取不同的方法。
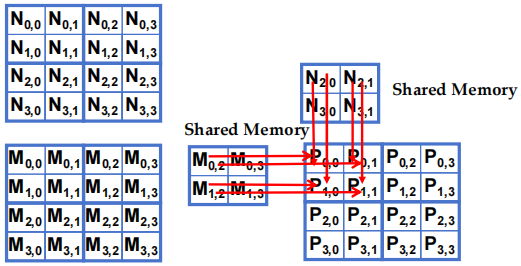
5.1.1 阶段 1 加载 3x3 的 Block(0,0)
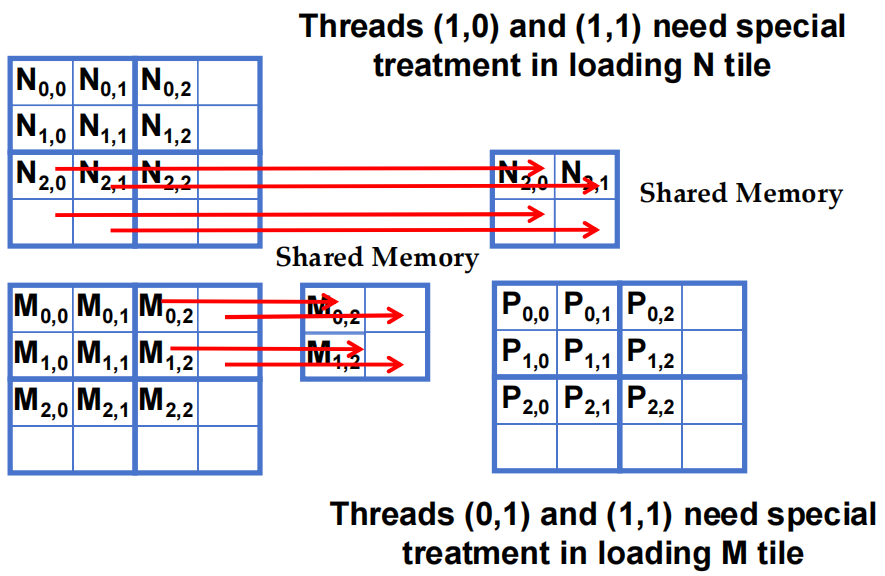
- 在加载 N tile 时 Threads (1,0) 和 (1,1) 需要特殊处理
- 在加载 M tile 时 Threads (0,1) 和 (1,1) 需要特殊处理
5.1.2 阶段 1 的 Block(0,0) 计算 (iteration 0)

5.1.3 阶段 1 的 Block(0,0) 计算 (iteration 1)
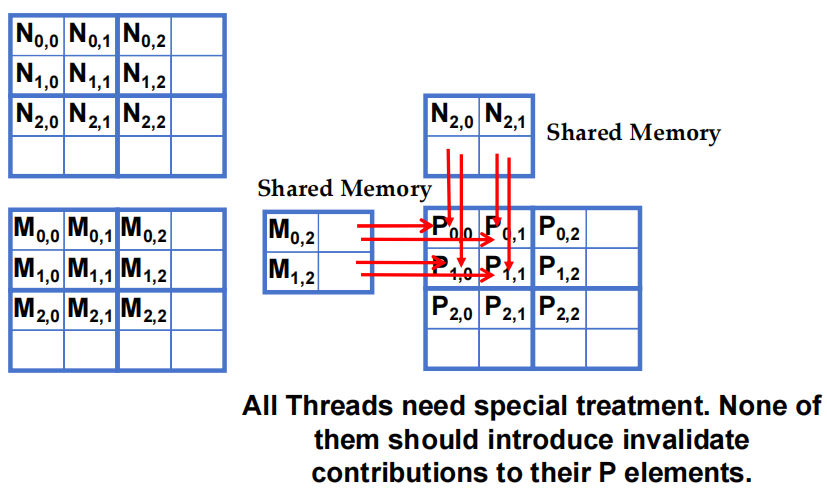
- 所有 thread 都需要特殊处理,所有 thread 都不应为其 P 元素引入无效贡献。
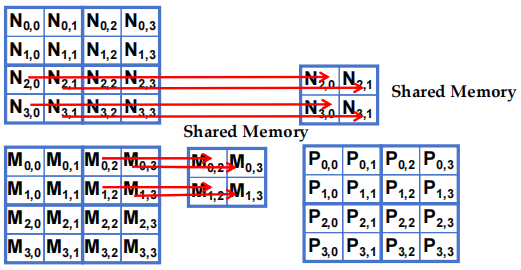
5.1.3 阶段 0 加载 3x3 的 Block(1,1)
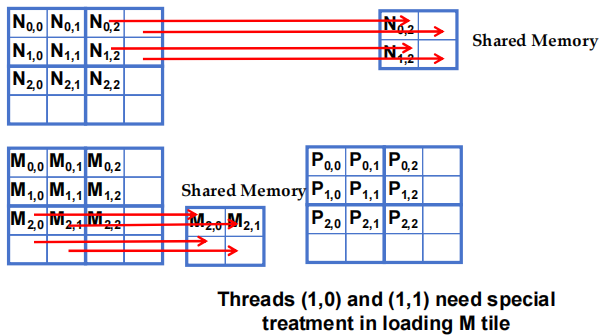
Thread(1,0) 和 (1,1) 在加载 M tile 时需要特殊处理
5.1.4 上述例子的要点
-
不计算有效P元素的 thread:
-
即使某些 thread 不直接计算有效的输出矩阵 P 的元素,它们仍然需要参与加载输入矩阵的 tile 数据。
-
例子1:Block(1,1) 的 Phase 0 阶段:
-
Thread(1,0)被分配去计算一个不存在的P矩阵元素P[3,2],但仍需参与加载输入矩阵N的元素N[1,2]。 -
这意味着,即使这个 thread 不会直接计算 P 中的有效结果,它仍需要协助完成输入数据(这里是N矩阵)的加载。
-
-
-
计算有效P元素的 thread:
- 即使某些 thread 被分配去计算有效的 P 矩阵元素,它们在加载输入数据时可能会尝试加载不存在的元素。
- 例子2:Block(0,0) 的 Phase 0 阶段:
Thread(1,0)被分配去计算有效的 P 矩阵元素P[1,0],但在加载输入时,它可能尝试去加载不存在的N矩阵元素N[3,0]。
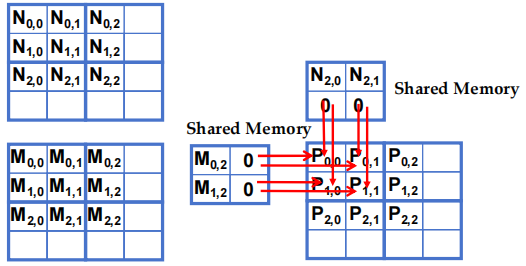
5.1.5 简单的解决方法
-
当 thread 要加载任何输入元素时,测试该元素是否在有效索引范围内
- 如果有效,则继续加载
- 否则,不加载,只写入 0
-
理由:0 值将确保乘加步骤不会影响输出元素的最终值
-
加载输入元素时测试的条件,与计算输出 P 元素时测试的条件不同
- 即使一个 thread 不计算有效的 P 元素,它仍然可以参与加载输入数据块的元素
-
阶段 1 的 Block(0,0) 计算 (iteration 1)
5.2 边界条件
5.2.1 输入 M tile 的边界条件
-
每个线程加载
M[Row][p*TILE_WIDTH + tx]M[Row*WIDTH + p*TILE_WIDTH + tx]
-
需要进行测试
(Row < Width) && (p*TILE_WIDTH + tx < WIDTH)- 如果为 true,加载 M 元素
- 否则,加载 0
5.2.2 输入 N tile 的边界条件
-
每个线程加载
N[p*TILE_WIDTH + ty][Col]N[(p*TILE_WIDTH + ty)*WIDTH + col]
-
需要进行测试
(p*TILE_WIDTH + ty < WIDTH) && (Col < WIDTH)- 如果为 true,加载 N 元素
- 否则,加载 0
5.2.3 加载元素 - 带边界检查
for(int p = 0; p < (WIDTH-1) / TILE_WIDTH + 1; ++p){
if(Row < WIDTH && p*TILE_WIDTH + tx < WIDTH){
ds_M[ty][tx] = M[Row*WIDTH + p*TILE_WIDTH + tx];
} else {
ds_M[ty][tx] = 0.0;
}
if(p*TILE_WIDTH + ty < WIDTH && Col < WIDTH){
ds_N[ty][tx] = N[(p*TILE_WIDTH + ty) * WIDTH + Col];
} else {
ds_N[ty][tx] = 0.0;
}
__syncthreads();
if(Row < WIDTH && Col < WIDTH) {
for(int i = 0; i < TILE_WIDTH; ++i) {
Pvalue += ds_M[ty][i] * ds_N[i][tx];
}
__syncthreads();
}
if (Row < WIDTH && Col < WIDTH)
P[Row*WIDTH + Col] = Pvalue;
}
5.2.4 一些重点
每个 thread 的条件都不同
- 加载 M 元素
- 加载 N 元素
- 计算并存储输出元素
5.2.5 处理一般矩形矩阵
一般来说,矩阵乘法是用矩形矩阵定义的:
上面我们介绍了正方形矩阵乘法,这是一种特殊情况。
kernel 函数需要通用化,以处理一般矩形矩阵:
- Width 参数由三个参数代替:j、k、l
- 当 Width 用于指 M 的高度或 P 的高度时,用 j 代替
- 当 Width 用于指 M 的宽度或 N 的高度时,用 k 代替
- 当 Width 用于指 N 的宽度或 P 的宽度时,用 l 代替
本文作者:Astron_fjh
本文链接:https://www.cnblogs.com/Astron-fjh/p/18509163
版权声明:本作品采用知识共享署名-非商业性使用-禁止演绎 2.5 中国大陆许可协议进行许可。



【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】凌霞软件回馈社区,博客园 & 1Panel & Halo 联合会员上线
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】博客园社区专享云产品让利特惠,阿里云新客6.5折上折
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步