
CUDA编程学习 (2)——CUDA并行性模型
 这篇文章深入探讨了CUDA编程中的并行性模型,重点介绍了基于kernel的单指令多数据(SPMD)编程。首先,通过向量加法示例,展示了CUDA内核函数的编写与调用,并解释了__global__、__device__和__host__的不同用法。接着,文章扩展到多维网格配置,演示如何处理图像数据,如RGB转灰度和图像模糊。最后,讨论了线程调度及其透明扩展性,强调了warp执行和GPU资源管理。
这篇文章深入探讨了CUDA编程中的并行性模型,重点介绍了基于kernel的单指令多数据(SPMD)编程。首先,通过向量加法示例,展示了CUDA内核函数的编写与调用,并解释了__global__、__device__和__host__的不同用法。接着,文章扩展到多维网格配置,演示如何处理图像数据,如RGB转灰度和图像模糊。最后,讨论了线程调度及其透明扩展性,强调了warp执行和GPU资源管理。
1.CUDA编程学习 (1)——CUDA C介绍
2.CUDA编程学习 (2)——CUDA并行性模型
3.CUDA编程学习 (3)——内存和数据定位4.CUDA编程学习 (4)——thread执行效率5.CUDA 编程学习 (5)——内存访问性能1. 基于 kernel 的 SPMD 并行编程
1.1 向量加法 kernel(device 代码)
// Device Code
// Compute vector sum C = A + B
// 每个 thread 执行一次成对加法
__global__ void vecAddKernel(float* A, float* B, float* C, int n)
{
int i = threadIdx.x + blockDim.x * blockIdx.x;
if(i < n) C[i] = A[i] + B[i];
}
1.2 向量加法 kernel lauch(host 代码)
// Host Code
void vecAdd(float* h_A, float* h_B, float* h_C, int n)
{
// 省略了 d_A、d_B、d_C 的 allocate 和 copy
// 运行 ceil(n/256.0) blocks,每个 block 包含 256 个 thread
// ceil 函数可确保有足够的 thread 覆盖所有元素
vecAddKernel<<<ceil(n/256.0), 256>>>(d_A, d_B, d_C, n);
}
表达 ceil 函数的等效方法:
// Host Code
void vecAdd(float* h_A, float* h_B, float* h_C, int n)
{
dim3 DimGrid((n-1)/256 + 1, 1, 1);
dim3 DimBlock(256, 1, 1);
vecAddKernel<<<DimGrid, DimBlock>>>(d_A, d_B, d_C, n);
}
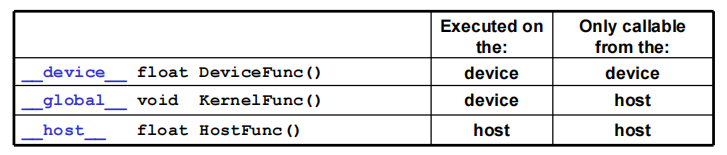
1.3 CUDA 函数声明
-
__device__:- 在 device 执行,仅从 device 调用
- 可以和
__host__同时调用,不可以和__global__同时调用
-
__global__:- 在 device 上执行,从 host 中调用(一些特定的 GPU 也可以从 device 上调用)
- 内核函数必须返回
void,不支持可变参数,不能成为类成员函数 - 注意用
__global__定义的 kernel 是异步的,这意味着 host 不会等待 kernel 执行完就执行下一步
-
__host__:- 在 host 上执行,仅从 host 上调用,一般省略不写
- 可以和
__device__,不可以和__global__同时调用,此时函数会在 device 和 host 都编译。
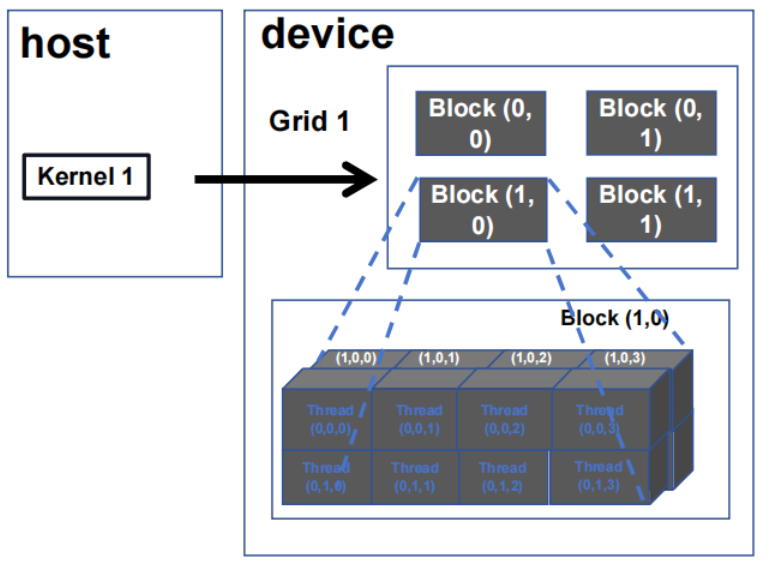
2. 多维 kernel 配置
2.1 多维 grid
2.2 使用二维网格处理图片

在 GPU 计算中,图像被划分为多个小块,每个小块由一个 block 进行处理。每个 block 内部包含多个 thread,这些 thread 协同工作以并行处理图像数据。
2.3 C/C++ 中的行优先布局
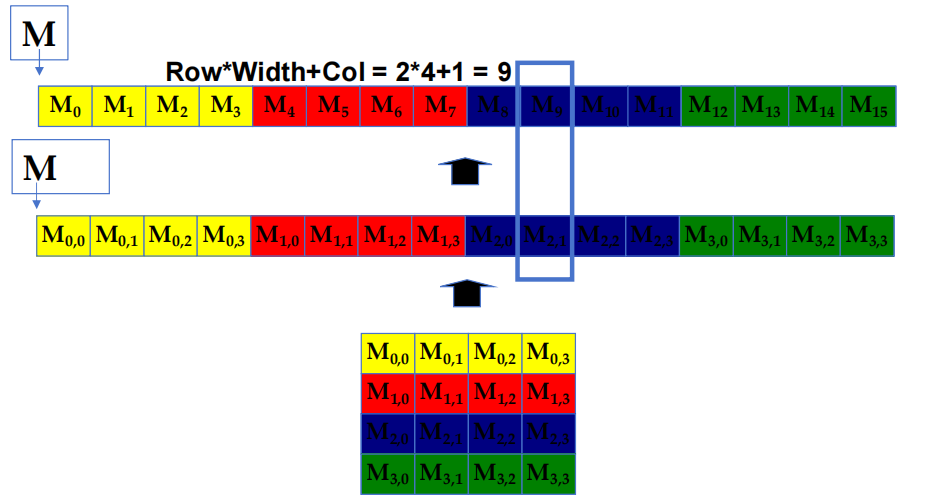
在这种布局中,矩阵中的元素按行顺序连续存储在内存中。具体来说,所有行的元素依次排列在一维的内存空间中。
例如,对于一个 4x4 的矩阵,元素 Row * Width + Col 用于计算矩阵中每个元素在一维内存数组中的线性位置。例如图中标注的元素
2.4 PictureKernel 源代码
__global__ void PictureKernel(float* d_Pin, float* d_Pout, int height, int width)
{
// 计算 d_Pin 和 d_Pout 元素的 row
int Row = blockIdx.y * blockDim.y + threadIdx.y;
// 计算 d_Pin 和 d_Pout 元素的 column
int Col = blockIdx.x * blockDim.x + threadIdx.x;
// 如果在范围内,每个 thread 计算 d_Pout 的一个元素
if((Row < height) && (Col < width)){
d_Pout[Row * width + Col] = 2.0 * d_Pin[Row * width + Col]; // 将每个 pixel 值缩放 2.0
}
}
2.5 Launch PictureKernel 的 host 代码
// 假设图片大小为 m × n
// y 维度上有 m 个 pixel,x 维度上有 n 个 pixel
// 输入 d_Pin 已被 allocate 并 copy 到 device
// 输出 d_Pout 已被 allocate 到 device
dim3 DimGrid((n-1)/16 + 1, (m-1)/16 + 1, 1);
dim3 DimBlock(16, 16, 1);
PictureKernel<<<DimGrid, DimBlock>>>(d_Pin, d_Pout, m, n);
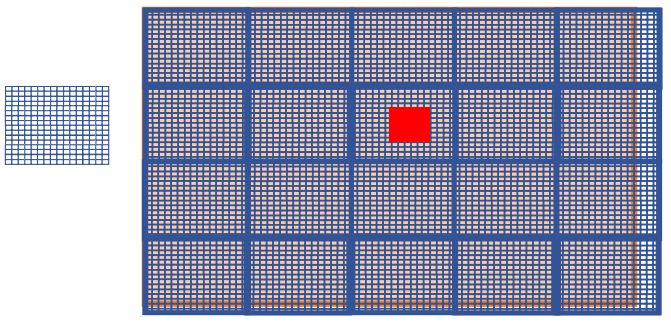
2.6 用 16×16 block 覆盖 62×76 大小的图片
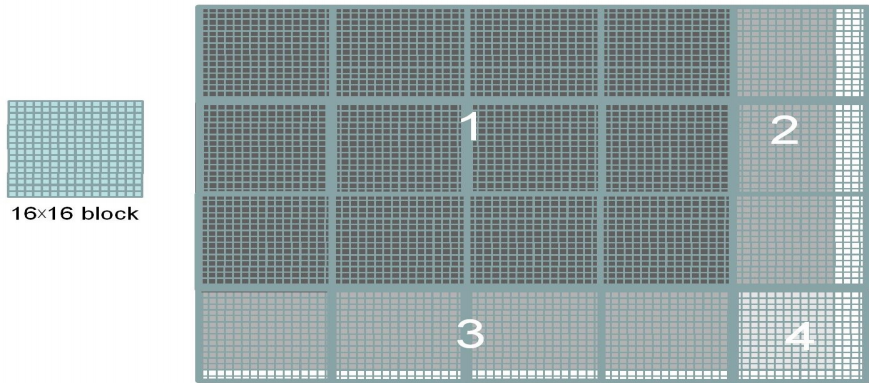
block 中并非所有 thread 都遵循相同的控制流路径。
3. 彩色-灰度图像处理示例
3.1 RGB 转换为灰度

灰度数字图像是指每个 pixel 的值只包含强度信息的图像。
- 对
- 这只是一个点积
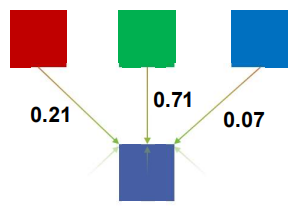
3.2 RGB 转灰度代码
# define CHANNELS 3 // 我们有 3 个与 RGB 相对应的通道
// 输入图像以无符号字符 [0, 255] 编码
__global__ void colorConvert(unsigned char* grayImage, unsigned char* rgbImage, int width, int height)
{
int x = threadIdx.x + blockIdx.x * blockDim.x;
int y = threadIdx.y + blockIdx.y * blockDim.y;
if(x < width && y < height){
// 获取灰度图像的 1D 坐标
int grayOffeset = y * width + x;
// 可以认为 RGB 图像的 columns 是灰度图像的 CHANNEL 倍
int rgbOffset = grayOffset * CHANNELS;
unsigned char r = rgbImage[rgbOffset]; // red value for pixel
unsigned char g = rgbImage[rgbOffset + 1]; // green value for pixel
unsigned char b = rgbImage[rgbOffset + 2]; // blue value for pixel
// 进行重新缩放并存储
// 我们用浮点常量进行乘法运算
grayImage[grayOffset] = 0.21f*r + 0.71f*g + 0.07f*b;
}
}
4. 图像模糊示例
4.1 图像模糊

- 模糊块(Blurring Box)
4.2 作为 2D Kernel 的图像模糊代码
__global__ void blurKernel(unsigned char* in, unsigned char* out, int w, int h)
{
int Col = blockIdx.x * blockDim.x + threadIdx.x;
int Row = blockIdx.y * blockDim.y + threadIdx.y;
if(Col < w && Row < h){
int pixVal = 0;
int pixels = 0;
// 获取周围 2xBLUR_SIZE x 2xBLUR_SIZE 方框的平均值
for(int blurRow = -BLUR_SIZE; blurRow < BLUR_SIZE+1; ++blurRow){
for(int blurCol = -BLUR_SIZE; blurCol < BLUR_SIZE+1; ++blurCol){
int curRow = Row + blurRow;
int curCol = Col + blurCol;
// 验证图像像素是否有效
if(curRow > -1 && curRow < h && curCol > -1 && curCol < w){
pixVal += in[curRow * w + curCol];
pixels++; // 跟踪累计总数中的像素数
}
}
}
// 写出新的 pixel 值
out[Row * w + Col] = (unsigned char)(pixVal / pixels);
}
}
5. 线程调度(Thread Scheduling)
5.1 透明扩展性(Transparent Scalability)
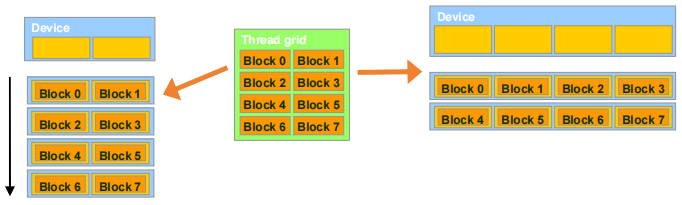
- block 是 GPU 的工作单元,它们可以在任何顺序下执行,彼此之间没有执行依赖关系。
- 硬件可随时自由地将 block 分配给任何处理器
- 一个 CUDA kernel 可以在任意数量的并行处理器上扩展,无论处理器数量如何,Block的分配是动态的
5.2 示例:执行 thread block
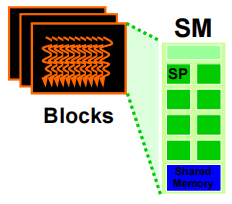
-
thread 按 block 粒度分配给流式多处理器(SM,Streaming Multiprocessors)
- 在资源允许的情况下,每个 SM 最多可连接 32 个 block
- Volta SM 最多可使用 2048 个 thread
- 可能是
- 或
- 可能是
-
SM 维护 thread / block idx #s:每个SM都会跟踪它所管理的线程和线程块索引,以便于调度和管理。
-
SM 管理和调度 thread 执行
5.3 作为调度单位的 Warp
- 每个 block 以 32-thread Warp 执行(每个 warp 包含 32 个线程)
- 实施决策,而非 CUDA 编程模型的一部分
- Warp 是 SM 中的调度单位
- Warp 中的 thread 以 SIMD 方式执行
- 未来的 GPU 可能会在每个 warp 中使用不同数量的 thread
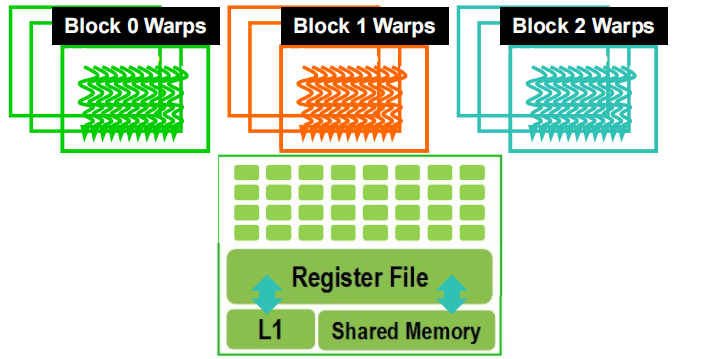
5.3.1 Warp 示例
- 如果一个 SM 有 3 个 block,每个区块有 256 个 thread,那么一个 SM 有多少个 Warp?
- 每个 block 分为
- 共有
- 每个 block 分为
5.4 线程调度
- SM 实现零开销 Warp 调度
- 下一条指令的操作数已准备就绪的 Warp 可执行(如果数据未准备好(例如由于内存延迟),该 warp 将会停滞,SM 会调度另一个 warp 执行)
- 符合条件的 warp 会根据优先调度策略被选择执行
- 当一个 warp 被选中执行时,warp 内的所有线程执行相同的指令(这是因为 GPU 采用 SIMT(单指令多线程) 模型,虽然每个线程处理的数据可能不同,但它们共享相同的指令流,使得并行执行更加高效。)
5.5 block 粒度考虑因素
- 对于使用多个 block 进行矩阵乘法运算的 Volta,每个 block 应该有
- 对于
- 对于
- 对于
- 对于
参考文献
本文作者:Astron_fjh
本文链接:https://www.cnblogs.com/Astron-fjh/p/18503843
版权声明:本作品采用知识共享署名-非商业性使用-禁止演绎 2.5 中国大陆许可协议进行许可。



【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】凌霞软件回馈社区,博客园 & 1Panel & Halo 联合会员上线
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】博客园社区专享云产品让利特惠,阿里云新客6.5折上折
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步