NJUPT第二次积分赛小结与视觉部分开源
1|0NJUPT第二次积分赛小结与视觉部分开源
跟队友连肝一周多积分赛,写了一堆屎山,总算是今天完赛了。结果也还行,80分到手。其实题目是全做完了的,但验收时我nt了没操作好导致丢了不少分,而且整个控制流程也都基于一堆bug和屎山做的,所以其实能做成这样我也很满意了,下次积分赛再战,只要国赛不出bug就行。
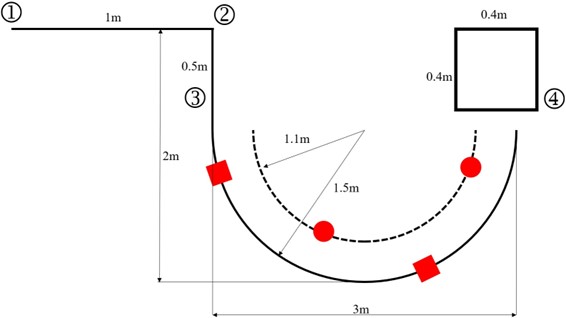
先放题目吧,如图:
基础部分:
基础1:小车从1号区域出发,巡线到2号区域(15分)
基础2:在基础1的基础上,小车在2号区域成功转直角弯,并走到3号区域。(15分)
基础3:在基础2的基础上,小车从3号区域成功走到4号位置。(10分)
基础4:在基础3的基础上,小车停车成功,在框内,不压到边界线。(10分)
提高部分:
小车以正方形和圆心区分左右移动,其中正方形指示小车向左移动,圆形指示小车向右移动。在移动时,如果移动侧存在道路,为变道,不存在道路为避障。其中避障从指定方向(识别的指示方向)绕过障碍,然后立即再次回到之前的道路上。即存在道路即继续按照道路行驶,如果不存在则超过障碍需要切回道路。距离越短越好。
例如,小车从3区域走到A障碍物处,发现为方形障碍物,需要往左移动,所以变道到虚线道路上,继续沿着虚线行驶到B位置,看到B为圆形障碍物,则小车往右侧移动,变道到实线道路上,继续沿着实线前进,看到C处为方形障碍物,从障碍物右侧避障再立刻回到实线道路。继续往前走,由于道路上不经过D处障碍物,所以不做处理。(D为隔壁道路的指示牌,与当前道路无关,视为干扰项,随机在小车此刻相邻道路的某一位置)。
注:所有障碍物颜色均为红色,一共有且仅有三个需要做出反应的障碍物。
发挥1:小车每成功路过一个障碍物,并执行相应动作获得10分,共30分。(路过干扰障碍物不额外加分)
发挥2:小车在每次变道/避障时,需要提前进行声光提示,变完道需要关闭声光提示。注:声光提示必须体现处左转和右转区别。(5分)
发挥3:小车成功走到4区域并完成停车。(10分)
发挥部分:
自由发挥出额外特色功能。(5分)
注:禁止使用麦克纳姆轮小车。
当初看到题目的时候,没觉得有多难,但真正入手时,是真的感觉到了题目的恶意。。。
我们队用的是树莓派4B 4GB + STM32401CCU6,一个USB摄像头,一个mpu6050(屁用没有),一个oled,一个TB6612,还有车板(拿平衡车板子改的,机械结构很逆天。)
先说出我们队做题时的几个困难点:
1、线好细,2mm线径,灰度巡线的队伍直接寄。还好我和我做控制的队友都没用过灰度,所以整套传感器基本是纯摄像头(mpu6050只能算是摆设,几套控制全程开环)
2、场地数字干扰。数字和线离得很近,干扰蛮大的,图像部分方案选取不好的话容易寄。
3、场地地形干扰。从1区域到2区域时车子左边噪声干扰较大,因为紧挨桌子,同时圆弧顶部离墙特别近,我们队的车又比较宽,如果不做一些处理的话巡线会直接撞墙,同时墙与地板之间的夹线对图像部分也有一定干扰。
4、障碍物大小不同。障碍物做的太过随便,都是拿胶把红色卡纸贴快递盒子上,高度大小都不太一样,甚至还有卷边。两个圆方识别我也是调了不少时间。
5、控制方案是真不好做。四个动作,两个变道,两个避障。在做变道的时候试了不少方案,一开始是准备mpu转90度走一段然后再转90度就开始寻线,但是后来由于车子形态,pid控制,mpu零漂,代码屎山堆积等多方面因素影响,我们最终选择直接开环。。。然后程序直接少了上百行,可读性大大增强。至于变道怎么个开环法,那还得是车子强大的巡线功能,从一条线上转个角度就能直接巡到另一条线上😋然后就是避障,还是靠的巡线,转个角度走个圆弧就切进线了😋
6、通信。我们用的串口,因为最常用。至于其他乱七八糟的通信协议用的都不怎么熟练,所以直接选用串口,但由于第一次进行STM32与树莓派交互通信,bug频出,有一个bug找了整整一天,最后还是一个有经验的学长过来指导的。。。真的很感谢那位学长!红豆泥阿里嘎多!
废话不多说,直接上图像部分代码。这是我封装后的函数,所以要用的话直接复制就能用。
1|0bgr转hsv
1|0逆时针90度旋转摄像头读取的图像:
1|0图像处理
1|0巡线(实线)
1|0巡线(虚线)
1|0检测近似水平的线
1|0检测近似垂直的线
1|0串口发送消息
1|0串口接收单字节消息(能接收,但有bug)
1|0识别矩形
1|0识别并提取圆形
1|0提取红色部分
1|0全套工程代码(一堆屎山)
因为自己比较懒,有些函数没怎么测试,反正思路在那,看着改改就好。
__EOF__

本文链接:https://www.cnblogs.com/Asaka-QianXiang/p/17344045.html
关于博主:评论和私信会在第一时间回复。或者直接私信我。
版权声明:本博客所有文章除特别声明外,均采用 BY-NC-SA 许可协议。转载请注明出处!
声援博主:如果您觉得文章对您有帮助,可以点击文章右下角【推荐】一下。您的鼓励是博主的最大动力!


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律