Cognex925B的使用方法
一、Cognex925B的简介


Cognex925B是一款线激光扫描传感器,利用激光三角的原理测量Z方向的断差。
二、Cognex925B的参数简介
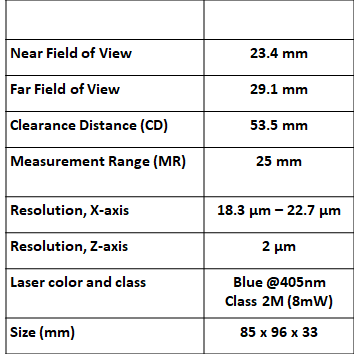

如上图所示,深蓝色部分就是Cognex925B的量测区域,我们来解析一下参数的含义:
Near Field of View 就是梯形的上边(蓝色区域),Far Field of View就是梯形的下边,X方向的精度为18.3um-22.7um,Z方向的精度为2um。
三、通过VisionPro处理925B的内容
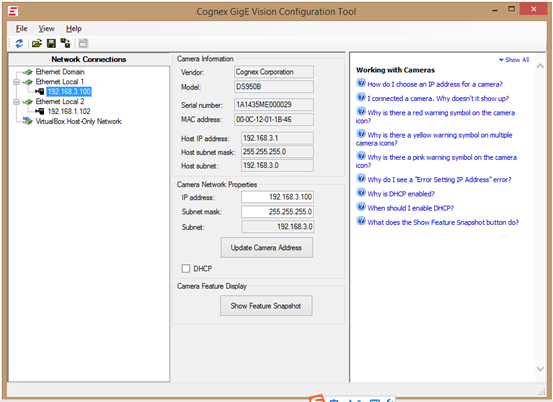
1.启动Cognex GigE Vision配置程序。 如果您的桌面上没有配置器,请参见附录B。 按照GigE Vision摄像机用户指南(参见附录B)中的说明配置设备的IP地址。
2、启动VisionPro®QuickBuild软件
通过双击VisionPro®QuickBuild图标启动QuickBuild。
3、将DS900传感器初始化为采集源
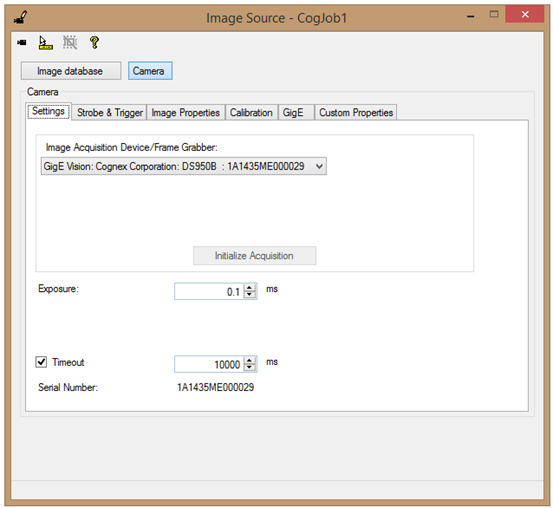
A、在QuickBuild工作区中,找到并双击CogJob1下的图像源条目。
B、在“图像源”对话框中,选择相机作为源。
C、在“图像采集设备”下拉列表中,找到DS900设备,然后单击“初始化采集”。
4、配置采集设置
请继续阅读下面的“配置DS900采集”部分
四、配置925B采集部分
本节将介绍采集配置界面各个选项卡中各种参数的设置。
曝光
曝光值(以毫秒为单位)应根据扫描的材料进行设置。
建议如下:
表1:推荐的快门时间(近似)
|
目标材料 |
快门时间 |
|
白色纸/塑料 |
10 - 50μs |
|
彩色塑料 |
50 - 100μs |
|
金属表面 |
0.1 - 1ms |
|
黑色塑料/橡胶 |
0.5 - 1ms |
超时
如果启用,此设置(以毫秒为单位)应设置为大于以下三个因素的总和:
1、采集请求和采集开始之间的最大时间(可能由于使用编码器时启动运动的延迟);
2、扫描部件所需的最大时间(由运动速度和扫描长度控制); 和
3、扫描完成后完成图像数据传输所需的最长时间。
选通和触发选项卡
触发模式
只有两种支持的模式是手动和自由运行。 DS900系列传感器不支持硬件触发。 自由运行模式可以使采集支持稍高的线速率。 设置Auto和Semi分别将系统设置为Free和Manual的等效状态。
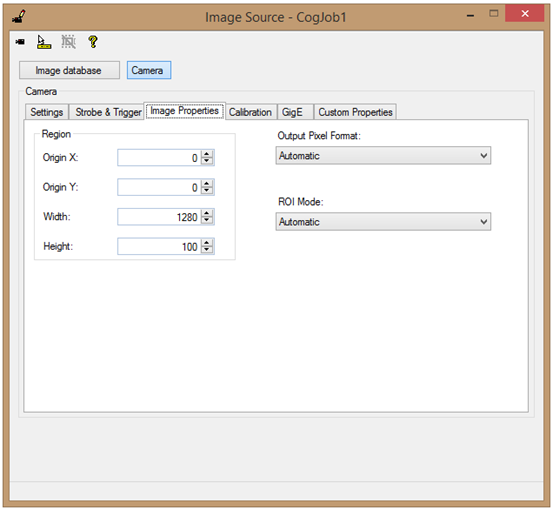
图像属性选项卡
区域
原点X和原点Y参数应始终设置为零。 Height参数可以根据扫描的产品长度而变化,但不应大于64000.适当的值可以通过以下公式估计:
Height = 产品长度/Yscale (Yscale即每扫描一次走的距离)
输出像素格式和ROI模式
使用两者的默认值(自动)。
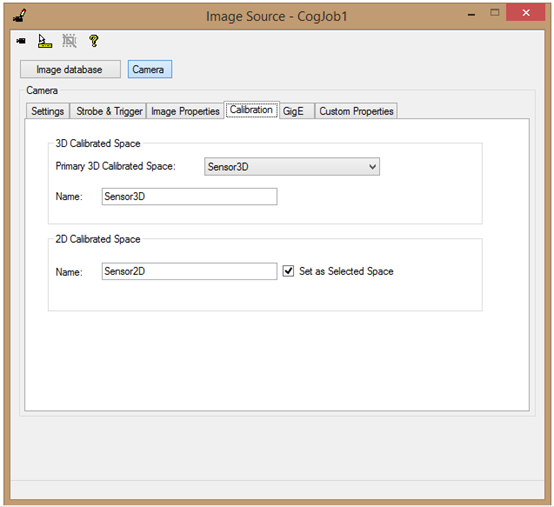
校准选项卡
使用默认参数。
主3D校准空间:Sensor3D,
2D校准空间名称:Sensor2D,
所选空间:已选中。
GigE标签
功能访问
此部分可用于设置或查询各种GigE功能。强烈建议不要使用此部分设置GigE功能,因为这样做可能会导致不可预测的结果,甚至可能导致采集失去响应和无法恢复。但是,可以安全地查询GigE功能。要执行查询,只需在要素文本框中键入要素名称,然后按读取按钮。然后,该要素的值将返回到“值”文本框中。
传输超时
此值类似于“设置”选项卡上的超时值,但不需要包括预获取时间。建议初始设置为20000毫秒。注意,如果命中超时,将返回以下获取错误消息:“获取失败异常。 (缓冲区检索失败(MISSING_PACKETS))“通常,它需要被设置为比预期的最长获取所花费的时间更长的值。如果编码器停止一段时间,然后继续,则空闲时间必须包括在传输超时的估计中。
数据包大小
设置此值在DS900采集的情况下不起作用,因为它由Cognex采集驱动程序内部控制。
延迟级别
此值应保留其默认值3。

自定义属性选项卡
此选项卡用于设置其他选项卡中不可用的各种相机参数。 在DS900的情况下,有许多重要的参数需要使用此方法设置。 每个参数将在下面概述。 使用位于功能列表上方的添加新按钮(Acquisition Profile Plus演练DS 900 Acquisition addnewbutton)添加参数。 使用位于功能列表上方的删除按钮(Acquisition Profile Plus演练DS 900采集删除按钮)删除参数。 网格中参数的顺序决定了它们写入相机的顺序。 此顺序在大多数情况下无关紧要,但可能会在添加非默认参数时产生影响,这些参数可能会对设置产生影响。 下表列出了用于配置正确采集的参数。 可选参数如此标记。
注意
请不要使用红色参
DS925B摄像机参数表
|
DS900类别 |
|
|
相机模式 |
范围(默认) 完成多行扫描后返回16位范围图像。 图像的大小反映了在“图像属性”选项卡中设置的参数。 强度 返回包含从单次采集返回的配置文件的1280x1024图片。 灰度范围 返回包含在范围模式中返回的图像的16位范围图像以及同一扫描的散射亮度图像。 后者可以与2D图像分析工具一起使用。 注意 有关实际示例,请参阅QuickBuild示例作业使用RangeWithGrey图像部分3D示例应用程序。 |
|
XScale |
用于设置图像在X方向(水平)的缩放系数。 降低XScale会使数据填充更多的图像宽度。 它不会更改保留在提供的像素值(图像属性选项卡|宽度参数)的输出图像大小。 |
|
启用重新采样
|
当启用(默认)时,将对所采集的图像进行重采样以产生所需的X缩放。禁用时,图像将返回到获取的用户(1280像素宽,作为推荐设置)。由于默认值为true,所有范围图像都将重新采样。
|
|
运动输入
|
l 模拟编码器(默认):使用内部定时器使传感器获取。 l 编码器:传感器将期望来自外部有线编码器的编码器脉冲。 l 手动:此模式保留以备将来使用。 |
|
每行的步数
|
此设置应用于控制编码器脉冲与所采集线路的比率。增加此值会降低传感器采集线的速率。默认值为4。 |
|
每周期距离
|
采集线之间的运动毫米数。这由编码器规格设置,根据StepsPerLine参数减小。对于正方形像素,此值必须与XScale参数值匹配。默认值为1.更改每个循环的距离不会更改范围图像的外观。此属性不以任何方式影响图像缩放。为了实现“正方形像素”,每像素的XScale必须匹配实际上在每像素的Y中获取的。更改此属性不会影响。 |
|
预期运动速度
|
这应该与运动级的物理速度匹配,以毫米每秒为单位。默认值为200。 注意 这仅适用于运动输入参数设置为模拟编码器。 |
|
忽略TooFast编码器 |
启用时,采集线路速率将限制为相机能够采集的速率。当使用外部编码器并且编码器驱动太快时,采集将有效地由基于时间的编码器控制。默认值为False,因此过快的编码器速率将被标记为错误。请注意,DS900上不能配置编码器方向,编码器分辨率和单通道编码器。如果禁用此参数,则采集将引发编码器超限错误(如果编码器脉冲速率超过最大采集帧速率)。启用此参数将导致遗漏的编码器脉冲被忽略。用于VisionPro 8.4的DS900系列不会生成缺少线。 |
|
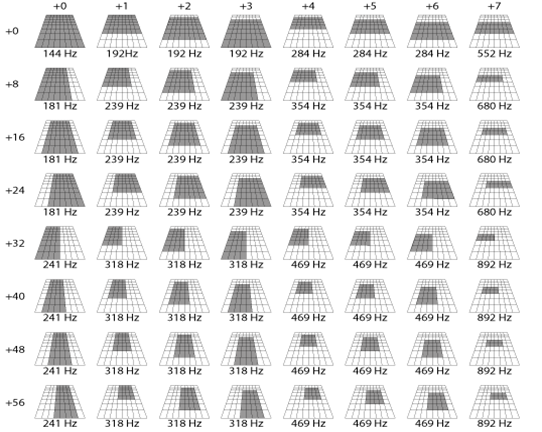
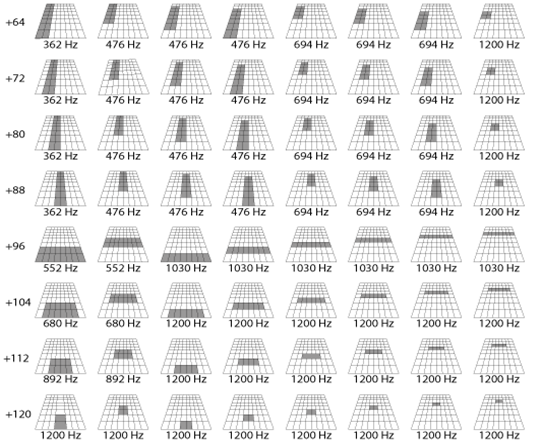
测量领域
|
控制梯形扫描区域的哪个部分是从中返回的数据。请参阅测量字段查找表以确定需要设置的值。默认值为5。 |
|
阈
|
扫描轮廓上满足或超过阈值的像素用于产生距离图像。低于阈值的像素被视为缺失。范围为0 - 255.默认值为128。 |
|
阈值动态
|
允许传感器自动调整配置文件的阈值,以通过在配置文件的不同部分允许不同的阈值来实现改进的结果。默认值为OFF。 |
|
配置文件相机获取方向 |
当设置为激光到镜头时,将调整图像变换,并可选择垂直翻转图像以校正镜像。默认值为“镜头到激光”。 |
|
数据包间超时
|
C控制在超时之前驱动程序在数据包之间等待的时间间隔的最大值。由于DS9xx传感器在获取数据包时发送数据包,因此当使用物理编码器时,超过此间隔的任何停止或极限运动减慢都会导致采集失败。默认为1000 mSec。 自动更正像素行顺序 当为真(默认值),轮廓相机获取方向设置为激光到镜头时,获取的距离图像将垂直翻转以删除镜像。 |
|
激光模式
|
l Strobed(默认) - 开始采集时(激光延迟中指定的延迟)打开激光,并在采集停止时关闭激光,即“仅在采集期间激光打开”。 l 手动 - 采集代码不控制激光,用户通过CP激光功率XML功能控制激光。这适用于出现异常长的激光延迟的情况 将需要设置以产生可靠的采集。 概要: l 关闭延迟:激光模式= Strobed,Lase rDelay = 0 l 关闭选通,激光打开:激光模式=手动,CP激光功率=标准功率 l 关闭选通,激光关闭:激光模式=手动,CP激光功率=关 |
|
激光延迟 |
指定激光打开和开始采集之间的延迟时间(以秒为单位)。默认值为0.005(5 mSec)。如果延迟设置为大于1秒,则会发生采集错误。将激光延迟设置为0会导致无延迟。 |
|
相机功能类别| 算法控制 |
|
|
中位数
|
定义要应用于轮廓的中值滤波器的内核大小,以帮助平滑和降噪。 可能的值是禁用,3位数,中位数5,中位7的默认值是禁用。 |
|
平均
|
定义要应用于轮廓的平均滤波器的内核大小,以帮助平滑和降噪。 可能的值是禁用,平均3,平均5和平均7。 默认值是禁用。 |
测量字段查找表
四、具体实战选型
讲了这么多,我们用一个实际的案例来看看如何选型:
A:选用模拟编码器
Step1:根据产品要测量的高度差,确定激光器到产品的距离及根据字段产找表最合适的测量领域。
一般而言我们让工作距离是53.5+25=78.5mm,或者比78.5mm小一点,字段查找表高度上有8个格,每个格大约是25/8 = 3.125mm。
当工作距离是78.5mm时,测量矩形的长边刚好在离传感器78.5mm的平面上,这个时候根据产品离基准面的高度确定选哪个测量领域。
说到底第一步就是先把测量领域确定下来,这一点至关重要。
Step2:根据马达的速度确定DistancePerCircle(每周期运动距离) DistancePerCircle = 马达速度(单位是mm/s)/测量领域对应的频率
YScale = DistancePerCircle *StepsPerLine/4 一般StepsPerLine = 4 就是说YScale = DistancePerCircle
设置XScale以匹配计算的YScale以获取正方形像素。或者,您可以选择不同的XScale,以更好地利用图像的像素宽度,并减少丢失的像素。
XScale不影响处理速度和编码器超限条件。作为指导,有效的XScale通常在0.05和0.01之间。其他值也可以工作,但会导致图像不必要的欠采样或过采样。
简单说就是原则上设置XScale = YScale ;
Step3 :设定Height
根据Height = 要测量的长度/DistancePerCircle 确定编码器Height的数值。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号