了解工业相机的相关参数能够帮助我们更好的理解相机功能,进而帮助我们完成对相机的选型工作。所谓外行看热闹,内行看门道,工业相机的门道就从其参数开始。
1、分辨率#
相机的传感器sensor是有许多像素点按照矩阵的形式排列而成,分辨率就是以水平方向和垂直方向的像素来表示的。分辨率越高,成像后的图像像素数就越高,图像就越清晰。常用的工业面阵相机分辨率有130万、200万、500万等;对于线阵相机而言,分辨率就是传感器水平方向上的像素数,常见有1K、2K、6K等。
在相机分辨率的选型上,要根据我们的项目需求而定,并不一定是分辨率越高就越好,分辨率高带来的图像数据量就大,后期的算法处理复杂度就高,而且一般分辨率大的相机,帧率一般都不会太高。
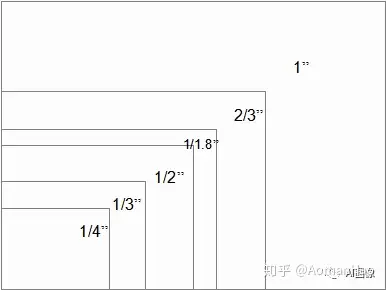
2、传感器尺寸#
传感器尺寸是以有效面积(宽x高)或以对角线大小(英寸)来表示的,常见的传感器尺寸如下:
传感器尺寸越大,一定程度上表示相机可容纳像素个数越多,成像的画幅越大。
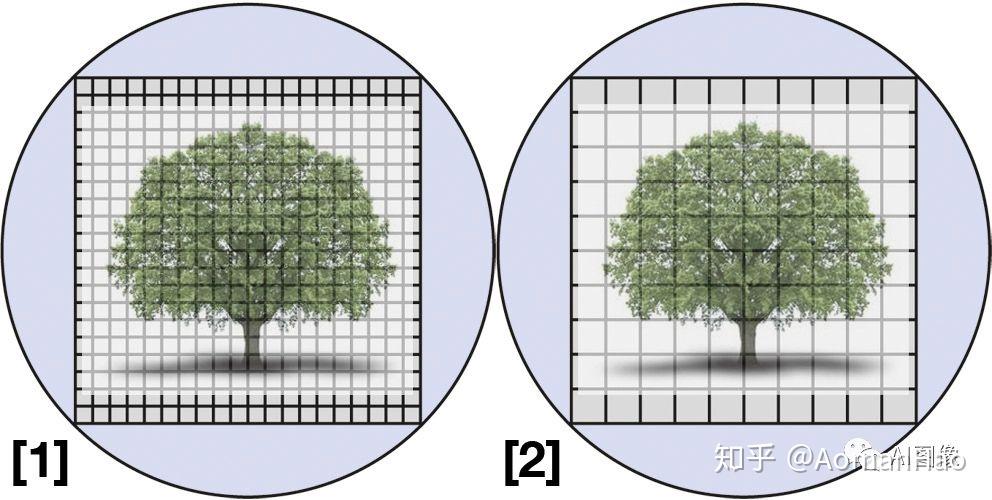
3、像元尺寸#
像元尺寸就是每个像素的面积。单个像素面积小,单位面积内的像素数量多,相机的分辨率增加,利于对细小缺陷的检测和增大检测视场。随着像素面积的缩小,满阱能力(每个像素能够储存的电荷数量)也随之减小,造成相机动态范围的降低。
4、像素深度#
像素深度是指每个像素用多少比特位表示。通常,每个像素的比特位数多,表达图像细节的能力强,这个像素的颜色值更加丰富、分的更细,颜色深度就更深。一般像素深度有1位、8位、16位、24位和32位。
1位像素深度就是有二进制来表示,也叫单色显示。
8位像素深度是最常见的,用8个二进制位来表示颜色,能表示256种颜色,这种就是常说的灰度显示。
16位是用16个二进制位来表示,能表示65536种颜色,这时就可以彩色显示啦。
24位和31位则表达的颜色信息就会更加的丰富。
5、动态范围#
动态范围是用来描述每个像素能够分辨出的灰度等级。它是饱和电压(最大的输出电平)相机输出的噪声之比。宽动态范围能够使场景中非常亮和非常昏暗部分的细节同时被清晰的显示。一般来说,低动态范围的相机噪声比较多,照片会缺失亮部细节和暗部细节。
6、最大帧率#
最大帧率表示的是面阵工业相机每秒能够采集并输出的最大帧数,这往往和传感器芯片和数据输出接口带宽有关。根据项目需求,对于拍摄运动物体,建议选取高帧率相机,具体帧率数要根据拍摄精度来确定。
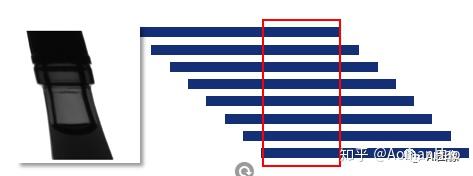
7、曝光方式#
工业相机常见的曝光方式有帧曝光(global shutter)和行曝光(rolling shutter)。
帧曝光是指传感器阵列中所有像素同时曝光,曝光周期由预先设定的快门时间确定。这种曝光方式的相机适合拍摄运动物体,图像不会偏移,不会失真。
行曝光是指同一行上的像素同时曝光,不同行的曝光起始时间不同,每行的曝光时间是相同的,行间的延迟不变。这种曝光方式的相机适用于拍摄静止的物体,拍摄运动物体,图像会偏移。
8、曝光时间#
传感器将光信号转换为电信号形成一帧图像,每个像元接受光信号的过程叫曝光,所花费的时间叫曝光时间,也叫快门速度。
9、采集模式#
采集模式分为了连续采集、外触发采集和软触发采集三种。
连续采集指相机进行连续曝光,输出实时图像。
外触发采集是指当相机处于外触发模式后,相机处于待机模式,不曝光,只有当相机通过I/O口接收到相机规定的单个脉冲(方波)信号后,传感器曝光一次,部分相机支持信号的上升沿、下降沿和高低电平的触发。
软触发是指当相机处于外触发模式后,相机处于待机模式,不曝光,只有当相机软件发出指令后,传感器曝光一次。
10、增益#
工业相机通常具有一个对传感器的信号进行放大的视频放大器,其放大倍数称为增益。增益越大,噪声就会变大,一般情况不建议增大增益值。
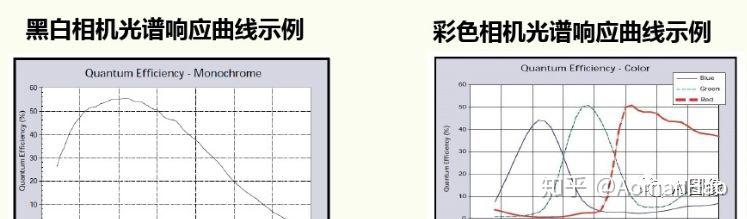
11、光谱响应特性#
光谱响应特性是指图像传感器对不同光波的敏感特性,变现了传感器的量子效率QE。
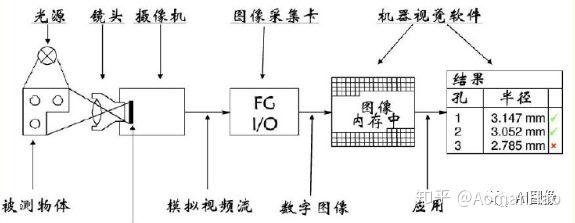
12、模拟相机与数字相机#
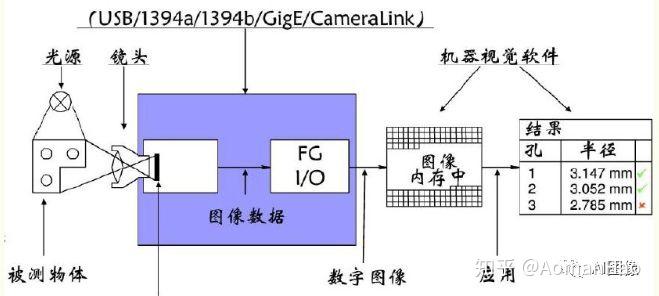
工业相机按输出图像信号格式划分为模拟相机与数字相机。早期的工业相机多采用PAL/ NTSC/ CCIR/ EIA-170等标准模拟输出,也有采用非标准模拟输出的产品,随着GigE/IEEE 1394/USB 2.0/ USB 3.0/ Camera Link/ CameraLink HS/ CoaXPress等数字接口技术的发展和普及,越来越多的工业数字相机取代传统的模拟相机出现在各种机器视觉系统中。
数字相机的信号受噪声干扰较少,因此数字相机的动态范围很高,图像质量更好;而模拟相机采集到的是模拟信号,要经过数字采集卡转换为数字信号,受噪声影响较大,分辨率低,且帧率一般固定。
模拟相机工作流程图如下:
数字相机工作流程图如下:
一般来说,镜头畸变实际上是光学透镜固有的透视失真的总称,也就是因为透视原因造成的失真,这种失真对于照片的成像质量是非常不利的,但因为这是透镜的固有特性(凸透镜汇聚光线、凹透镜发散光线),所以无法消除,只能改善。
枕形畸变
枕形畸变(Pincushion Distortion),又称枕形失真,它是由镜头引起的画面向中间“收缩”的现象。我们在使用长焦镜头或使用变焦镜头的长焦端时,最容易察觉枕形失真现象。
桶形畸变
桶形畸变(Barrel Distortion),又称桶形失真,是由镜头中透镜物理性能以及镜片组结构引起的成像画面呈桶形膨胀状的失真现象。我们在使用广角镜头或使用变焦镜头的广角端时,最容易察觉桶形失真现象。
远心镜头#
远心镜头(Telecentric),主要是为纠正传统工业镜头视差而设计,它可以在一定的物距范围内,使得到的图像放大倍率不会变化,这对被测物不在同一物面上的情况是非常重要的应用。远心镜头由于其特有的平行光路设计一直为对镜头畸变要求很高的机器视觉应用场合所青睐.
远心镜头光路的特点是,几乎进入到镜头的光都是强反射光。
非远心镜头成像效果:
远心镜头成像效果:
远心镜头主要弥补非远心镜头的以下特点;#
1)由于被测量物体不在同一个测量平面,而造成放大倍率的不同;
2)镜头畸变大
3)视差也就是当物距变大时,对物体的放大倍数也改变;
4)镜头的解析度不高;
5)由于视觉光源的几何特性,而造成的图像边缘位置的不确定性。
远心和非远心各自的优点:#
普通镜头优点:成本低,实用,用途广。
普通镜头缺点:放大倍率会有变化,有视差。
普通镜头应用:大物体成像。
远心镜头的优点:放大倍数恒定,不随景深变化而变化,无视差。
远心镜头的缺点:成本高,尺寸大,重量重。
远心镜头的应用:度量衡方面,基于CCD方面的测量,微晶学
当检查物体遇到以下6中情况时,最好选用远心镜头:
1)当需要检测有厚度的物体时(厚度>1/10 FOV直径);
2)需要检测不在同一平面的物体时;
3)当不清楚物体到镜头的距离究竟是多少时;
4)当需要检测带孔径、三维的物体时;
5)当需要低畸变、图像效果亮度几乎完全一致时;
6)当缺陷只在同一方向平行照明下才能检测到时。
素材转自公众号《AI图像》











【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· winform 绘制太阳,地球,月球 运作规律
· 超详细:普通电脑也行Windows部署deepseek R1训练数据并当服务器共享给他人
· 上周热点回顾(3.3-3.9)
· TypeScript + Deepseek 打造卜卦网站:技术与玄学的结合
· AI 智能体引爆开源社区「GitHub 热点速览」