
关于RoI pooling 层
ROIs Pooling顾名思义,是pooling层的一种,而且是针对ROIs的pooling;
整个 ROI 的过程,就是将这些 proposal 抠出来的过程,得到大小统一的 feature map。
什么是ROI呢?(https://www.sogou.com/link?url=DOb0bgH2eKh1ibpaMGjuyy_CKu9VidU_Nm_z987mVIMm3Pojx-sH_PfgfR9iaaFcn666hxi--_g.)
ROI是Region of interest的简写,指的是faster rcnn结构中,经过rpn层后,产生的proposal对应的box框。
ROI Pooling的输入
输入有两部分组成:
1. data:指的是进入RPN层之前的那个Conv层的Feature Map,通常我们称之为“share_conv”;
2. rois:指的是RPN层的输出,一堆矩形框,形状为1x5x1x1(4个坐标+索引index),其中值得注意的是:坐标的参考系不是针对feature map这张图的,而是针对原图的(神经网络最开始的输入)
ROI Pooling的输出
输出是batch个vector,其中batch的值等于roi的个数,vector的大小为channelxwxh;ROI Pooling的过程就是将一个个大小不同的box矩形框,都映射成大小为wxh的矩形框;
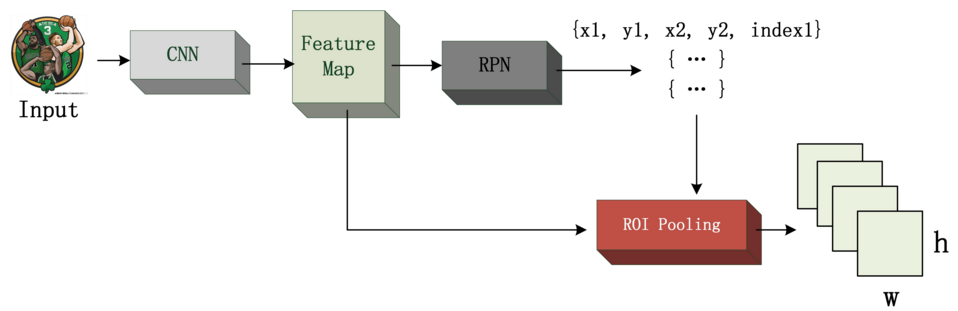
如图所示,我们先把roi中的坐标映射到feature map上,映射规则比较简单,就是把各个坐标除以输入图片与feature map的大小的比值,得到了feature map上的box坐标后,我们使用pooling得到输出;由于输入的图片大小不一,所以这里我们使用的spp pooling,spp pooling在pooling的过程中需要计算pooling后的结果对应的两个像素点反映社到feature map上所占的范围,然后在那个范围中进行取max或者取average。
---------------------
(https://www.sogou.com/link?url=44aejrzSKwWwrNJcKKLVtEK1rJUb32uHp37TwbVHvja5OaZX_AHBzQ..)
TensorFlow的pool layer是固定大小的
(https://www.sogou.com/link?url=DSOYnZeCC_rR_TP93bdO6GxT14t4sbuOSwJr4L_oLI5lf9NGYfOU6pULrym3hTBVtsCnpVGpPpA.)
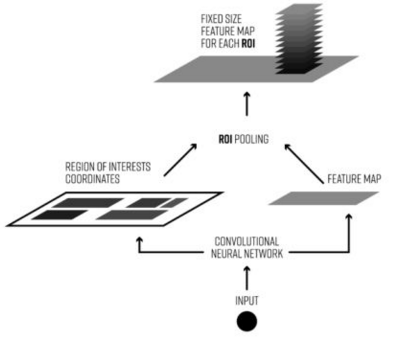
RoI Pooling就是实现从原图区域映射到conv5区域最后pooling到固定大小的功能。
输入,b0 为卷积的feature map,b1 为rois。
Reshape
Forward(向前传播)
backward(反向传播)
(https://www.sogou.com/link?url=DSOYnZeCC_rR_TP93bdO6GxT14t4sbuOSwJr4L_oLI5lf9NGYfOU6pULrym3hTBVtsCnpVGpPpA.)
我们知道在Faster R-CNN中,对于每个ROI(文中叫candidate object)主要有两个输出,一个输出是分类结果,也就是预测框的标签;另一个输出是回归结果,也就是预测框的坐标offset。而Mask R-CNN则是添加了第三个输出:object mask,也就说对每个ROI都输出一个mask,该支路是通过FCN网络(如Figure1中的两个卷积层)来实现的。以上这三个输出支路相互之间都是平行关系,相比其他先分割再分类的实例分割算法相比,这种平行设计不仅简单而且高效。
---------------------
作者:AI之路
来源:CSDN
原文:https://blog.csdn.net/u014380165/article/details/81878644
大致回顾下ROI Pool层的操作:
ROI Pool的输入是ROI的坐标和某一层的输出特征,不管是ROI Pool还是ROIAlign,目的都是提取输出特征图上该ROI坐标所对应的特征。RPN网络得到的ROI坐标是针对输入图像大小的,所以首先需要将ROI坐标缩小到输出特征对应的大小,假设输出特征尺寸是输入图像的1/16,那么先将ROI坐标除以16并取整(第一次量化),然后将取整后的ROI划分成H*W个bin(论文中是 7*7,有时候也用14*14),因为划分过程得到的bin的坐标是浮点值,所以这里还要将bin的坐标也做一个量化,具体而言对于左上角坐标采用向下取整,对于右下角坐标采用向上取整,最后采用最大池化操作处理每个bin,也就是用每个bin中的最大值作为该bin的值,每个bin都通过这样的方式得到值,最终输出的H*W大小的ROI特征。从这里的介绍可以看出ROI Pool有两次量化操作,这两步量化操作会引入误差。
---------------------
作者:AI之路
来源:CSDN
原文:https://blog.csdn.net/u014380165/article/details/81878644

 浙公网安备 33010602011771号
浙公网安备 33010602011771号