

基于移动最小二乘的图像变形和曲线拟合
在最近的项目中经常遇到给出几个点需要拟合出一条曲线。
在离散的点云中,求曲线曲面拟合,不能简单地连接这些点,如果知道曲线曲面的形式,如为二次曲线等,可以简单地使用最小二乘法估计参数;但如果曲线曲面形式未知,可以使用移动最小二乘法或者主曲线方法。
MLS的讲解
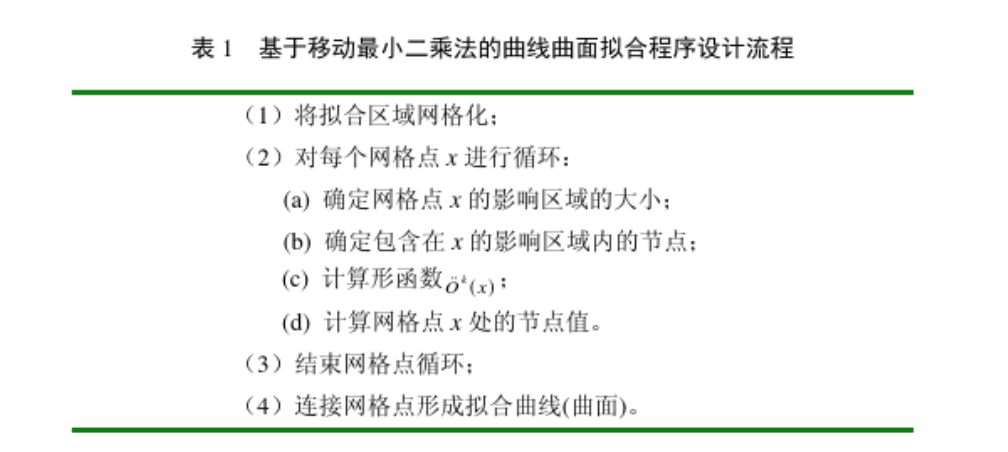
移动最小二乘法是在最小二乘法基础上加以改进的,添加了权函数等,具体的可以参考论文,“移动最小二乘法论文”链接,这篇论文对MLS讲解的很详细,最后还给出了程序设计思路。
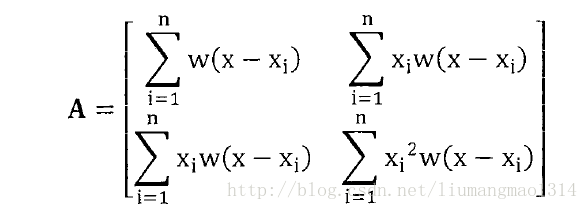
我做一点点说明,论文中的矩阵A的写法欠妥,其他关于移动最小二乘法研究中还有另外一种写法:
MLS代码块
代码的话我是根据论文中提供的程序设计,再结合一些网上的资料编写出来的,编程语言是C++;当然我也编写了python,应该是先编python,再编的C++。原因是python中可以加载一个矩阵运算库,C++中没有矩阵运算,要自己编写库,大家可以参考我这篇博客,介绍了矩阵运算链接。但是后来实验发现,python跑起来很费时间,C++只需它的一半的时间久跑完了,需要python代码也可以私信我,这里就不贴了。哦,对了,代码是包含很多自定义函数和变量,大家不要瞎贴代码,对照那篇论文的程序设计思路一下子就懂了,话不多说,上代码:
//移动最小二乘法的具体计算过程,参照论文“基于移动最小二乘法的曲线曲面拟合”,AB矩阵参照论文“移动最小二乘法的研究” int MLS_Calc(int x_val,int y_val,float x[],float y[],float z[]) { int max_delta=max_x-min_x;//区域半径 float p[M][N]={0}; float sumf[N][N]={0}; float w[M]={0}; for(int j=0;j<M;j++)//求w { float s=fabs((x[j]-x_val))/max_delta; if(s<=0.5) w[j]=2/3.0-4*s*s+4*s*s*s; else { if(s<=1) w[j]=4/3.0-4*s+4*s*s-4*s*s*s/3.0; else w[j]=0; } p[j][0]=1;//每个采样点计算基函数 p[j][1]=x[j]; p[j][2]=y[j]; p[j][3]=x[j]*x[j]; p[j][4]=x[j]*y[j]; p[j][5]=y[j]*y[j]; } f(w,x,y,sumf,p);//计算得出A矩阵 float p1[N]; Matrix A=Trans_Matrix(sumf,N); Matrix A_1=m_c.Matrix_copy(&A); m_c.Matrix_inv(&A_1);//求A矩阵的逆A_1 Matrix B(N,1);//求矩阵B,N行M列 B.init_Matrix(); for(int j=0;j<M;j++)//求得B矩阵的每列 { p1[0]=1*w[j]; p1[1]=x[j]*w[j]; p1[2]=y[j]*w[j]; p1[3]=x[j]*x[j]*w[j]; p1[4]=x[j]*y[j]*w[j]; p1[5]=y[j]*y[j]*w[j]; Matrix P=Trans_Matrix_One(p1,N);//数组P1转成1行N列的P矩阵 if(j==0)//第一列直接赋值 { for(int i=0;i<N;i++) B.write(i,0,p1[i]); } else { m_c.Matrix_trans(&P);//矩阵转置,P转为N行1列矩阵 m_c.Matrix_addCols(&B,&P);//矩阵B列附加,形成N行M列矩阵 } P.free_Matrix(); } float D[N]={1,x_val,y_val,x_val*x_val,x_val*y_val,y_val*y_val}; Matrix D1=Trans_Matrix_One(D,N);//转成1行N列矩阵 Matrix D_A1_mul(1,N);//定义矩阵并初始化相乘的结果矩阵,1行N列 D_A1_mul.init_Matrix(); if(m_c.Matrix_mul(&D1,&A_1,&D_A1_mul)==-1) cout<<"矩阵有误1!";//1行N列矩阵乘以N行N列矩阵得到结果为1行N列 Matrix D_A1_B_mul(1,M);//定义矩阵并初始化相乘的结果矩阵,1行M列 D_A1_B_mul.init_Matrix(); if(m_c.Matrix_mul(&D_A1_mul,&B,&D_A1_B_mul)==-1) cout<<"矩阵有误2";//1行N列矩阵乘以N行M列矩阵得到记过矩阵为1行M列 Matrix z1=Trans_Matrix_One(z,M);//将数组z转换成1行M列矩阵 m_c.Matrix_trans(&z1);//转置得到M行1列矩阵 Matrix Z(1,1);//得到矩阵结果,1行1列 Z.init_Matrix(); if(m_c.Matrix_mul(&D_A1_B_mul,&z1,&Z)==-1) cout<<"矩阵有误3!";//1行M列矩阵乘以M行1列矩阵得到1行1列矩阵,即值Z float z_val=Z.read(0,0); if(z_val>255) z_val=255; if(z_val<0) z_val=0; A.free_Matrix(); A_1.free_Matrix(); B.free_Matrix(); D1.free_Matrix(); D_A1_mul.free_Matrix(); D_A1_B_mul.free_Matrix(); z1.free_Matrix(); Z.free_Matrix(); return (int)z_val; }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号