AStar算法()
把网上的AStar算法的论述自己实现了一遍,一开始只是最基础的实现。当然,现在AStar算法已经演变出了各种优化的版本,这篇也会基于各种优化不断的更新。
如果对算法不熟悉可以看下Stanford的这篇文章,我觉得是讲解的十分仔细的了:http://theory.stanford.edu/~amitp/GameProgramming/,也附上国内的翻译:http://blog.csdn.net/coutamg/article/details/53923717
讲讲我对上面这篇文章的理解:
(1)AStar算法的核心就在于这个公式了f(n) = g(n) + h(n),算法的效果如何也都取决于这个公式。就如文章中说的,g(n)可以看做从start到current所花费的cost,h(n)从current到end的花费。
很多人会直接将这两个当做距离来计算,这是在忽略地形等条件影响下最简单的模型。对于每一步,我们可以确定g(n)的准确值,但是h(n)很难预估正确的值(特别是在复杂且大型的场景中)。文章中也提供了几种解决方案比如waypoint等。
(2)算法维护着两张表openlist和closelist,openlist初始化时将start加入。
在循环寻找路径时,将openlist中优先级最高的元素取出,移入closelist中,表示该点已经“探测”过。对该点的周围N个neighbor进行检测,符合条件将其加入openlist中,并对openlist进行优先级排序。
既然是对基础的简单理解,就不多说直接贴上代码:


1 using System.Collections; 2 using System.Collections.Generic; 3 using UnityEngine; 4 5 public class AStar { 6 7 public enum POINT_TYPE 8 { 9 normal, 10 obstacle, 11 } 12 13 public class POINT:System.IComparable 14 { 15 float _gValue, _hValue; 16 public float gValue 17 { 18 get 19 { 20 return _gValue; 21 } 22 set 23 { 24 _gValue = value; 25 fValue = AStar.GetFValue(pos,gValue,hValue); 26 } 27 } 28 29 public float hValue 30 { 31 get 32 { 33 return _hValue; 34 } 35 set 36 { 37 _hValue = value; 38 fValue = AStar.GetFValue(pos, gValue, hValue); 39 } 40 } 41 public float fValue 42 { 43 get; 44 private set; 45 } 46 public Vector2 pos, parent; 47 public POINT_TYPE type; 48 49 public int CompareTo(object obj) 50 { 51 POINT pt = obj as POINT; 52 if (fValue < pt.fValue) 53 return -1; 54 else if (fValue == pt.fValue) 55 return 0; 56 else 57 return 1; 58 } 59 60 61 } 62 63 public Dictionary<Vector2, POINT> points = new Dictionary<Vector2, POINT>(); 64 public static Vector2 startPt, endPt; 65 66 public List<POINT> openList = new List<POINT>(); 67 public List<POINT> closeList = new List<POINT>(); 68 69 public bool finish = false; 70 71 72 public static float GetFValue(Vector2 pt,float gValue,float hValue) 73 { 74 Vector2 vec1 = pt - startPt; 75 Vector2 vec2 = endPt - startPt; 76 float fac = Vector3.Cross(new Vector3(vec1.x, vec1.y, 0), new Vector3(vec2.x, vec2.y, 0)).normalized.z > 0 ? 0.01f : -0.01f; 77 return gValue + 2f * hValue + fac; 78 } 79 80 float GetManhattanDistance(Vector2 pos1, Vector2 pos2) 81 { 82 return Mathf.Abs(pos1.x - pos2.x) + Mathf.Abs(pos1.y - pos2.y); 83 } 84 85 List<POINT> GetNeighbours(Vector2 pt) 86 { 87 List<POINT> neighbouts = new List<POINT>(); 88 if (points.ContainsKey(new Vector2(pt.x - 1, pt.y))) 89 neighbouts.Add(points[new Vector2(pt.x - 1, pt.y)]); 90 if (points.ContainsKey(new Vector2(pt.x + 1, pt.y))) 91 neighbouts.Add(points[new Vector2(pt.x + 1, pt.y)]); 92 if (points.ContainsKey(new Vector2(pt.x, pt.y +1))) 93 neighbouts.Add(points[new Vector2(pt.x, pt.y +1)]); 94 if (points.ContainsKey(new Vector2(pt.x, pt.y - 1))) 95 neighbouts.Add(points[new Vector2(pt.x, pt.y - 1)]); 96 return neighbouts; 97 } 98 99 public void Init(List<POINT> pts,Vector2 start,Vector2 end) 100 { 101 foreach (POINT pt in pts) 102 { 103 points.Add(pt.pos, pt); 104 } 105 106 startPt = start; 107 endPt = end; 108 109 points[startPt].parent = start; 110 points[startPt].gValue = 0; 111 points[startPt].hValue = Mathf.Abs(startPt.x - endPt.x) + Mathf.Abs(startPt.y - endPt.y); 112 113 openList.Add(points[startPt]); 114 115 finish = false; 116 } 117 118 public void StepNext() 119 { 120 if (finish) 121 return; 122 123 POINT current = openList[0]; 124 openList.Remove(current); 125 closeList.Add(current); 126 if (current.pos == endPt) 127 { 128 finish = true; 129 return; 130 } 131 132 List<POINT> neighbours = GetNeighbours(current.pos); 133 for (int i = 0; i < neighbours.Count; i++) 134 { 135 if (neighbours[i].type == POINT_TYPE.obstacle || closeList.Contains(neighbours[i])) 136 continue; 137 138 bool needSort = false; 139 float gValue =GetManhattanDistance(neighbours[i].pos,startPt); 140 float hValue = GetManhattanDistance(neighbours[i].pos,endPt); 141 float fValue = AStar.GetFValue(neighbours[i].pos,gValue,hValue); 142 143 if (openList.Contains(neighbours[i])) 144 { 145 if (neighbours[i].fValue > fValue) 146 { 147 neighbours[i].gValue = gValue; 148 neighbours[i].hValue = hValue; 149 needSort = true; 150 } 151 } 152 else 153 { 154 neighbours[i].gValue = gValue; 155 neighbours[i].hValue = hValue; 156 neighbours[i].parent = current.pos; 157 openList.Add(neighbours[i]); 158 needSort = true; 159 } 160 161 162 if (needSort) 163 openList.Sort(); 164 } 165 166 } 167 168 }
简单的标注这几行:
49-58 :继承于IComparable接口类,并且重写了CompareTo方法。这样就可以利用List<T>.Sort()来排序了。在CompareTo方法中,当fValue相等时,hValue值小具有更高的priority。关于fValue相同的情况在论文中有阐述。
71-77:根据g(n),h(n)计算f(n)。上面说的算法的核心公式是f(n) = g(n) + h(n),但是很多时候这样简单的相加并不能适应各种复杂的情况。考虑这样一种情况:
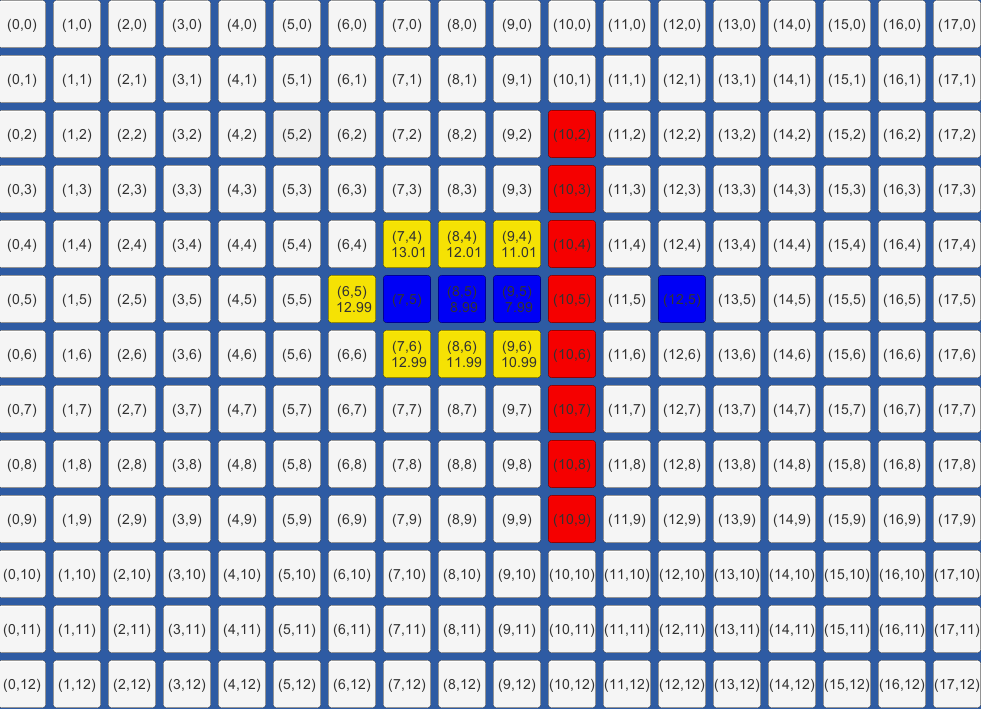
(请忽略这张图中坐标下的数值(f值),并不与代码相符)
蓝色为当前探测的点,黄色为待探测的点。若用公式f(n) = g(n) + h(n)此时有两种相等(f和h都相同)的情况,这样将增大计算的消耗。这里简单的用了cross函数使相等时总是能选择某一侧作为偏向。
138-139:g和h的值分别为n点到start和end点的曼哈顿距离(x,y轴上距离相加),这里其实只是近似值,并且g的值其实来说并不准确。上文说道g值对于每一步的计算来说都是可以确定的。在本例中暂且这样,下一例中改进。
来看一下算法的效果:


第一张图从(0,10)到(14,2),第二张图从(0,12)到(14,2)。绿色为算法最终输出的路径,黄色与蓝色为检测的范围。
而在实现过程中也法线了g和h对算法的影响。当g>>h时,算法偏向于全方位的检测,当h>>g时,算法偏向于向end点方向检测。
posted on 2017-12-20 09:44 AndrewChan 阅读(9416) 评论(0) 收藏 举报

 浙公网安备 33010602011771号
浙公网安备 33010602011771号