DIY Arduino 方向盘
之前的项目中使用Arduino做UE4的输入设备时候需要用到UE4Duino这个插件,以字符串的形式从Arduino中组装信息并发送到串口,使用UE4Duino进行解析,过程比较麻烦。
最近发现的一个工具UnoJoy可以把Arduino变成一个游戏手柄,开发和调试就简单多了。不过要注意它只能模拟一些常规的游戏输入,例如左右摇杆的X,Y axis,各种按钮等。对于自行车轮胎测速这种需求可能就无能为力了,还是需要使用UE4Duino手动组装和解析数据。
这里就把diy一个游戏方向盘的过程记录下来。
必备工具
硬件
- Arduino Uno,
- 电位器,
- 下拉电阻(10K)
软件
- Unojoy(https://code.google.com/archive/p/unojoy/), 进入downloads后下载 最新的windows版本
- x360ce(https://www.x360ce.com/) 我使用的是64位版
- flip(http://www.microchip.com/Developmenttools/ProductDetails/FLIP) ,下载 FLIP 3.4.7.112 for Windows (Java Runtime Environment included)版
- Visual Leak Detector(https://kinddragon.github.io/vld/),不确定这个是不是必须,启动x360ce时会提示你下载,如果看到提示,就下载吧。下载installer版本最简单,直接默认安装
步骤1
连接电路:
电位器两端引脚分别连接5V和ground,中间引脚连接模拟输入A0。最终我们只使用A0模拟为游戏手柄的Left ThumbStick X-Axis
为了确保A1-A5-输入为稳定值,可以给他们都通过下拉电阻接地。
步骤2
安装flip,默认安装即可
步骤3
给arduino通电,然后短路arduino最靠近usb连接口的两个针脚几秒钟。
打开设备管理器,会出现Other device> unknown device。
右键>Update Driver Software,
Browse my computer for driver software
Let me pick a list.....
Next
Have disk
Browse...
选择unojoy中的drivers/Arduino Uno.inf
OK
Next
Install
步骤4
打开unojoy中的 UnojoyArduinoSample/目录中的ino文件,编译上传。
如果上传失败,可能需要重新拔、插Arduino,在IDE中选择正确的com口再上传
步骤5
重新拔、插 Arduino,双击unojoy中的TurnIntoAJoystick.bat, 稍等片刻后,提示按任意键退出。
再次重新拔、插Arduino.
然后再控制面板/硬件和打印机中就能看到一个unojoy joystick的图标,双击并选择属性可以进行测试。
到上一步为止已经完成了通用的配置
下面是为UE4设置的步骤
步骤6
把下载好的x360ce.exe放置到UE4的exe文件目录下(Engine/Binaries/Win64/)
双击打开,按照提示点击Create,创建一个dll文件。
设置如下:
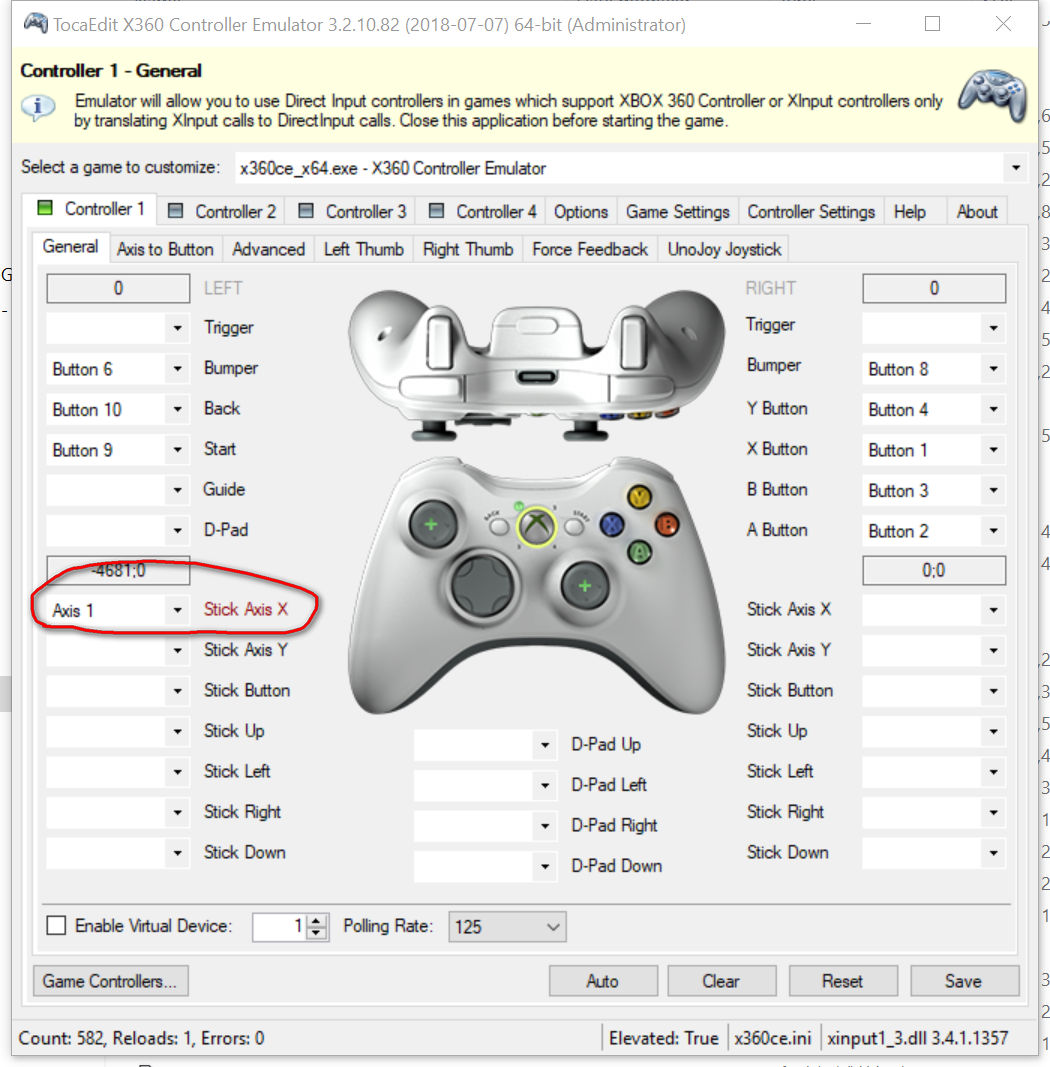
这里只需要一个Stick Axis X,这里选择Axes- Axis1,保存。
注意,如果使用的不是电位器,而是飞行控制摇杆等设备,发现没有办法走满行程,那么需要修改UnojoyArduinoSample.inf文件,首先打印出真实的数值范围,然后使用map函数重新映射相应的模拟引脚的数值范围到(0-1023).
到此为止所有的设置都完成了,剩下的就是进入UE4的配置环节了
步骤7
新建一个车辆模板工程,在工程的输入设置中,去掉所有无用的设置,把右转向设置为 Gamepad Left Thumbstick X-Axis。
如果运行游戏发现中间死区过大,可以展开Bindings的高级选项,展开Axis Config,把Gamepad LetfX 的deadzone设置为很小的数值。
步骤8
如果Arduino还要用作普通Arduino使用,连接reset引脚几秒钟,运行 TurnIntoAnArduino.bat, 稍过片刻,再重新拔、插,即可还原。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号