
操作系统学习笔记——第二章 进程管理 和 第三章 死锁
在学习操作系统时总结了笔记,并分享出来,特别是蓝色和红色字体。有问题请及时联系博主:Alliswell_WP,转载请注明出处。
参考书:《操作系统》谌卫军等,清华大学出版社,2012年5月
参考视频:清航全套计算机专业课视频
目录
第二章 进程管理
1.进程(Process)
2.线程(Thread)
3.进程间通信
4.经典的IPC问题
5.进程调度
第三章 死锁
第二章 进程管理(进程三种状态的转换?如何共享数据?低级通信?高级通信?互斥(引入的原因及如何解决)?PV原语、经典的三大IPC问题及解决方案、进程调度的优先级、死锁)
1.进程(Process)
为什么使用进程?Why processes?
为了提高计算机系统中各种资源的利用率,现代操作系统广泛采用多道程序技术(multi-programming),使多个程序同时在系统中存在并运行。
X86 CPU 寄存器
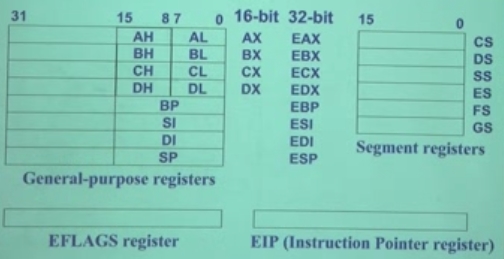
程序1 程序2
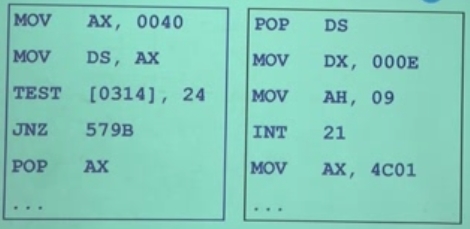
问题:硬件只有一份,如何使这两个程序同时运行?
为此,操作系统设计者提出了进程的概念。
什么是进程?A process = a program in execution
一个进程应该包括:
-程序的代码;
-程序的数据;
-CPU寄存器的值,如PC,用来指示下一条将运行的指令、通用寄存器等;
-堆、栈;
-一组系统资源(如地址空间、打开的文件)
总之,进程包含了正在运行的一个程序的所有状态信息。
扩展:栈的作用是什么?保存临时数据、函数调用时来分配栈针来存放形参和局部变量
进程和程序的区别?
程序是静态的,进程是动态的。
进程的特性
-动态性:程序的运行状态在变,PC、寄存器、堆和栈等;
-独立性:是一个独立的实体,是计算机系统资源的使用单位。每一个进程在一个“虚拟计算机”上运行,每个进程都有“自己”的PC和内部状态,运行时独立于其他的进程(虚拟PC和物理PC);
如何实现逻辑PC?
在内存开辟一段空间,实现不同进程物理PC和逻辑PC轮流切换。
引起进程创建的三个主要事件?
-系统初始化时;
-在一个正在运行的进程当中,执行了创建进程的系统调用;
-用户请求创建一个新进程。
进程的三个基本状态
-运行状态(Running):进程占有CPU,并在CPU上运行。处于此状态的进程数目小于等于CPU的数目。
-就绪状态(Ready):进程已经具备运行条件,但由于CPU忙暂时不能运行,只要分得CPU即可运行;
(万事俱备只欠东风,只欠CPU)
-阻塞状态(Blocked/Waited):指进程因等待某种事件的发生而暂时不能运行的状态(如I/O操作或进程同步),此时,即使CPU空闲,该进程也不能运行。
类比:修自行车……(运行——正在修;就绪——正在修别人的车,等空闲修;阻塞——坏零件,买回来才能修)
进程的状态及其转换
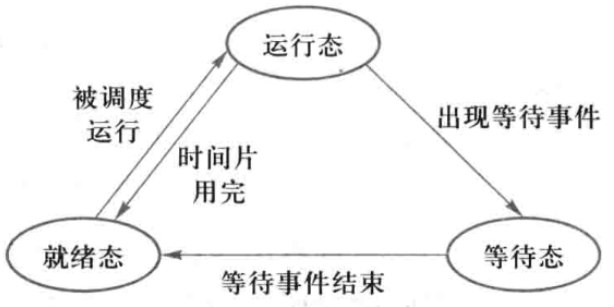
引起进程状态转换的具体原因如下:
运行态→等待态:等待使用资源;如等待外设传输;等待人工干预。
等待态→就绪态:资源得到满足;如外设传输结束;人工干预完成。
运行态→就绪态:运行时间片到;出现有更高优先权进程。
就绪态—→运行态:CPU 空闲时选择一个就绪进程。
问题:1)进程正常运行(未阻塞)时处于什么状态?运行态或就绪态
2)此页正在讲的PPT处于什么状态?阻塞态
3)是否有其他的状态转换?没有,这三种只有四种情况。
程序 = 数据结构 + 算法
描述进程的数据结构:进程控制块(Process Control Block,PCB)。
系统为每个进程都维护了一个PCB,用来保存与进程有关的各种状态信息。
PCB中的主要内容
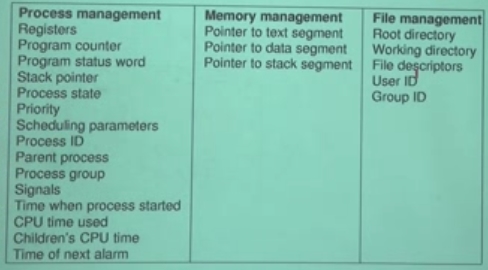

系统用PCB来描述进程的基本情况以及运行变化的过程,PCB是进程存在的唯一标志。
进程的创建:为该进程生成一个PCB;
进程的终止:回收它的PCB;
进程的组织管理:通过对PCB的组织管理来实现;
状态队列
-由操作系统来维护一组队列,用来表示系统当中所有进程的当前状态;
-不同的状态分别用不同的队列来表示(运行队列、就绪队列、各种类型的阻塞队列);
-每个进程的PCB都根据它的状态加入到相应的队列当中,当一个进程的状态发生变化时,它的PCB从一个状态队列中脱离出来,加入到另外一个队列。
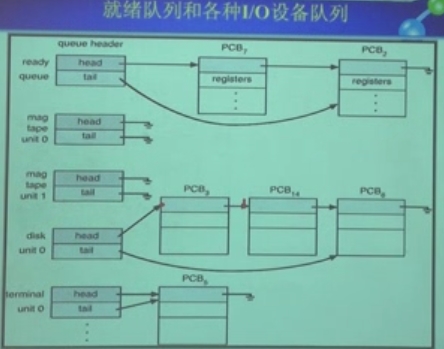
如何实现队列?链表
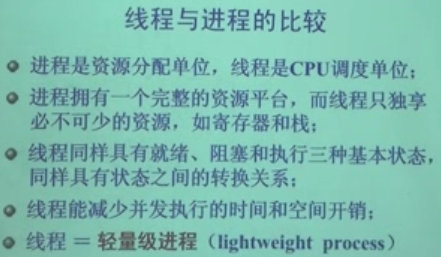
2.线程(Thread)
为什么要引入线程?
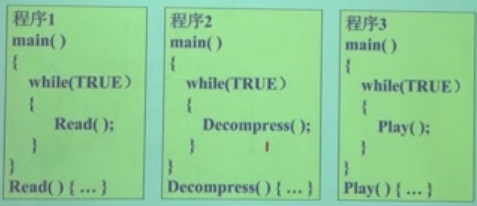
【案例】编写一个MP3播放软件。核心功能模块有三个:1)从MP3音频文件当中读取数据;2)对数据进行解压缩;3)把解压缩后的音频数据播放出来。
单进程的实现方法
1 main() 2 { 3 while(TRUE) 4 { 5 Read();//I/O 6 Decompress();//CPU 7 Play();//I/O 8 } 9 } 10 Read(){……}//读数据 11 Decompress(){……}//解压缩 12 Play(){……}//播放
问题:1)播放出来的声音能否连贯?2)各个函数之间不是并发执行,影响资源的使用效率;
多进程的实现方法
问题:进程之间如何通信,共享数据?
怎么来解决这些问题?
需要提出一种新的实体,满足一下特性:1)实体之间可以并发地执行;2)实体之间共享相同的地址空间;
这种实体就是:线程
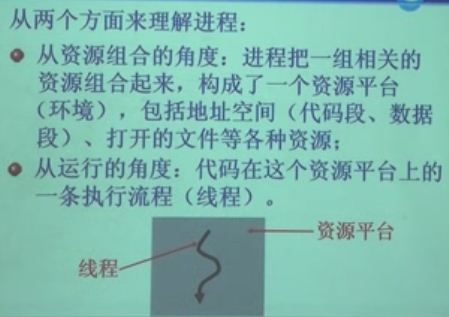
进程 = 线程 + 资源平台
优点:1)一个进程可以同时存在多个线程;2)各个线程之间可以并发地执行;3)各个线程之间可以共享地址空间。

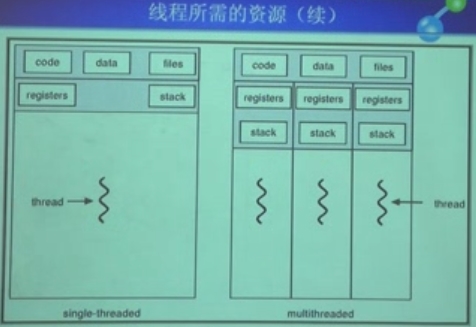
理解:为什么CPU寄存器的值和栈的值不能共享?
3.进程间通信
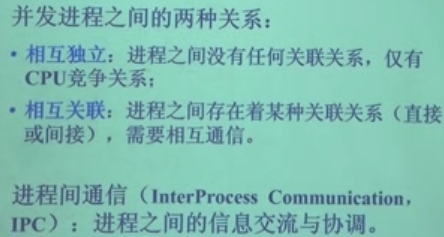
需要讨论的问题:
-进程间如何通信呢,如何来相互传递信息呢?
-当两个或多个进程在访问共享资源时,如何确保它们不会相互妨碍——进程互斥问题;
-当进程之间存在着某种依存关系时,如何来调整它们运行的先后次序——进程同步问题。
生活中的例子:教室的座位——互斥、两同学相约看电影——同步
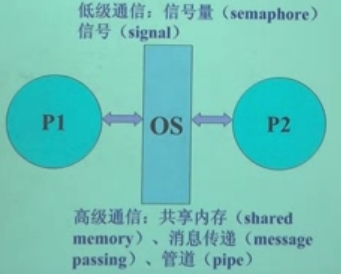
进程间通信方式
-低级通信:只能传递状态和整数值(控制信息)
-高级通信:能够传送任意数量的数据
如何实现通信?能否共享内存单元(全局变量或共享缓冲区)?
进程间互斥
产生的原因:1)进程宏观上并发执行,依靠时钟中断来实现微观上轮流执行;2)访问共享资源。
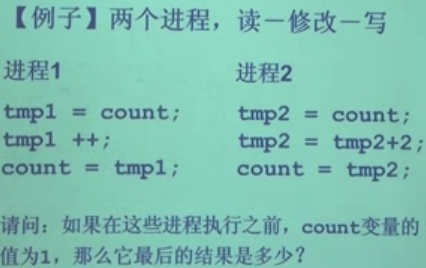

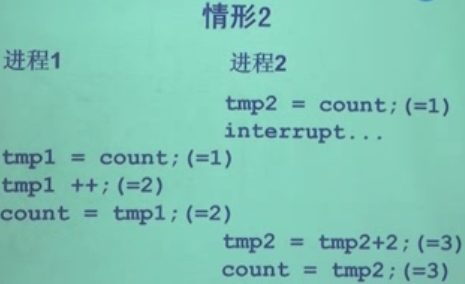

竞争状态(race condition):两个或多个进程对同一共享数据同时进行读写操作,而最后的结果是不可预测的,它取决于各个进程具体运行情况。
解决之道:在同一时刻,只允许一个进程访问该共享数据,即如果当前已有一个进程正在使用该数据,那么其他进程暂时不能访问。这就是互斥的概念。
(备注:例子有点问题?进程之间不可以共享数据!此例子不严谨)
实现互斥访问的四个条件
1)任何两个进程都不能同时进入临界区;
2)不能事先假定CPU的个数和运行速度;
3)当一个进程运行在它的临界区外面时,不能妨碍其他的进程进入临界区;
4)任何一个进程进入临界区的要求应该在有限时间内得到满足。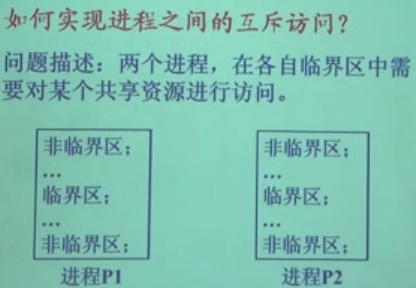
基于繁忙等待的互斥实现


1 #define FALSE 0 2 #define TRUE 1 3 #define N 2//进程的个数 4 int turn;//轮到谁? 5 int interested[N];//兴趣数组,初始值均为FALSE 6 void enter_region(int process)//process=0或1 7 { 8 int other;//另外一个进程的进程号 9 other=1-process; 10 interested[process]=TRUE;//表明本进程感兴趣 11 turn=process;//设置标志位 12 while( turn=process&& interested[other]=TRUE); 13 } 14 void leave_region(int process) 15 { 16 interested[process] = FALSE;//本进程已离开临界区 17 }
Peterson算法解决了互斥访问的问题,而且不会相互妨碍,可以完全正常地工作。
分析:
第一种情况:
P0在执行完other=1-process;后时钟中断;P1正常执行
全局变量:
turn: interested:[0](0) [1](0)
局部变量(栈):
P0——process:0;other:1——>P0时钟中断
P1——process:1;other:0——interested:[0](0) [1](1);turn:1——while循环条件不成立(interested[0]等于0,不等于1),卡不住,P1往下执行——>然后P0继续执行;interested:[0](1) [1](1);turn:0——while循环条件成立(turn等于process等于0;interested[1]等于1;),P0卡住,P0不能往下执行
——>P1进入,P0卡住
第二种情况:
P0在执行interested[process]=TRUE;后时钟中断;P1正常执行
全局变量:
turn: interested:[0](0) [1](0)
局部变量(栈):
P0——process:0;other:1;interested:[0](1) [1](0)——>P0时钟中断
P1——process:1;other:0——interested:[0](1) [1](1);turn:1——while循环条件成立(turn等于process等于1;interested[0]等于1;),P1卡住,P1不能往下执行——>然后P0继续执行;turn:0——while循环条件成立(turn等于process等于0;interested[1]等于1;),P0卡住,P0不能往下执行——>然后P1继续执行(在while处);——while循环条件不成立(turn(0),不等于process(1)),P1卡不住,P1往下执行——>然后P0继续执行——while循环条件成立(turn等于process等于0;interested[1]等于1;),P0卡住,P0不能往下执行
——>P1进入,P0卡住
核心:时钟中断;
解决方法:一步步执行
小结:以上的各种方法,都是基于繁忙等待(busy waiting)的策略,都可归纳为一种形式:当一个进程想要进入它的临界区时,首先检查一下是否允许它进入,若允许,就直接进入了;若不允许,就在那里循环地等待,一直等到允许它进入。
缺点:1)浪费CPU时间;2)可能导致预料之外的结果(如:一个低优先级进程位于临界区中,这时有一个高优先级的进程也试图进入临界区)
问题步骤描述:
-一个低优先级的进程正在临界区中;
-另一个高优先级的进程就绪了;
-调度器把CPU分配给高优先级的进程;
-该进程也想进入临界区;
-高优先级进程将会循环等待,等待低优先级进程退出临界区;
-低优先级进程无法获得CPU,无法离开临界区。
解决之道:
-当一个进程无法进入临界区时,应该被阻塞起来(sleep);
-当一个进程离开临界区时,需要去唤醒(wake up)被阻塞的进程;
-克服了繁忙等待方法的两个缺点(浪费CPU时间、可能死锁)。
现有的进程互斥问题形式:两个或多个进程都想进入各自的临界区,但在任何时刻,只允许一个进程进入临界区。
新的进程互斥问题形式:两个或多个进程都想进入各自的临界区,但在任何时刻,只允许N个进程同时进入临界区(N≥1)。
如何解决?信号量PV操作
-1965年由著名的荷兰计算机科学家Dijkstra提出,其基本思路是用一种新的变量类型(semaphore)来记录当前可用资源的数量。
-semaphore的取值可正可负,正数表示当前空闲资源的数量,负数的绝对值表示正在等待进入临界区的进程个数。
-信号量是由操作系统来维护的,用户进程只能通过初始化和两个标准原语(P、V原语)来访问。初始化可指定一个非负整数,即空闲资源总数。
备注:原语就是函数
-P、V原语包含有进程的阻塞和唤醒机制,因此在进程等待进入临界区时不会浪费CPU时间;
-P原语:申请一个空闲资源(把信号量减1),若成功,则退出;若失败,则该进程被阻塞;
-V原语:释放一个被占用的资源(把信号量加1),若发现有被阻塞的进程,则选择一个唤醒之。
信号量和P、V原语的实现
信号量结构体类型的定义:
1 typedef struct 2 { 3 int count;//计数变量 4 struct PCB*queue;//进程等待队列 5 }semaphore;
P原语:申请一个资源
1 P( semaphore S) 2 { 3 --S.count;//表示申请一个资源; 4 if(S.count<0)//表示没有空闲资源; 5 { 6 该进程进入等待队列S.queue末尾; 7 阻塞该进程; 8 调用进程调度器;//OSSched() 9 } 10 }
V原语:释放一个资源
1 V( semaphore S) 2 { 3 ++S.count;//表示释放一个资源; 4 if(S.count<=0)//表示有进程被阻塞; 5 { 6 从等待队列S.queue中取出一个进程; 7 把该进程改为就绪状态,插入就绪队列 8 } 9 }
Windows 2000
-CreateSemaphore(创建信号量)
-WaitForSingleObject(P操作)
-ReleaseSemaphore(V操作)
μCOS-Ⅱ
-osSemCreate(创建信号量)
-osSemPend(P操作)
-osSemPost(V操作)
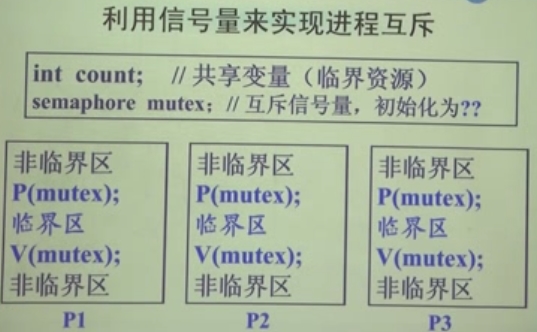
备注:互斥信号量初始化为1
分析:PV原语为什么可以实现进程互斥访问?
原理:PV原语不会中断
思考步骤:如果P1执行P(mutex);;--S.count后count为0,if判断不成立,继续往下执行,进入临界区,发生了中断(此时P1为就绪队列)——>P2执行P(mutex);;--S.count后count为-1,if判断成立,P2进入阻塞队列;——>P3执行P(mutex);;--S.count后count为-2,if判断成立,P3进入阻塞队列——(此时就绪队列:P1;阻塞队列:P2——P3)
——>P1继续执行,V(mutex);;++S.count;后count为-1,if判断成立(把P2取出,阻塞改为就绪,P1就绪)——>P2继续执行(接着上回P操作中if条件的最后),进入临界区,然后V(mutex);;++S.count;后count为0,if判断成立(把P3取出,阻塞改为就绪,P1,P2就绪) ——>P3继续执行(接着上回P操作中if条件的最后),进入临界区,然后V(mutex);;++S.count;后count为1,if判断不成立,然后P3进入非临界区——>P1、P2进入非临界区
进程间的同步是指多个进程中发生的事件存在某种时序关系,因此在各个进程之间必须协同合作,相互配合,使各个进程按一定的速度执行,以共同完成某一项任务。
同步:合作。互斥:竞争。
只考虑基于信号量的同步问题。
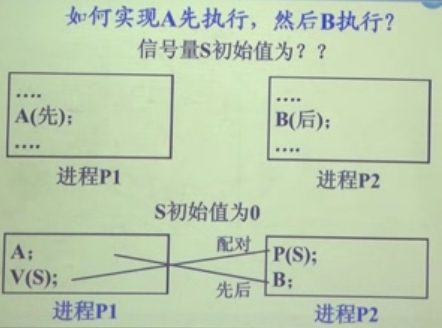
考虑:(S初值为0)若先进程P1(先A,然后V(S)),S=1——>然后P2,P(S),S=0,执行B——先A后B可以
(S初值为0)若先进程P2,P(S),S=-1,卡住,不执行,P2阻塞——>然后执行P1(先A,在调用V(S)),S=0,唤醒B,执行B——先A后B可以
4.经典的IPC问题
1)生产者一消费者问题
2)哲学家就餐问题
3)读者一写者问题
用信号量来解决,主要问题:如何选择信号量,如何安排P、V原语的顺序。
1)生产者一消费者问题
两个进程(生产者和消费者)共享一个公有的、固定大小的缓冲区,生产者不断地制造产品,并把它放入缓冲区,而消费者不断地把产品取出来,并且使用它。要求这两个进程相互协调,正确地完成各自的工作。

问题分析
对于生产者进程:制造一个产品,当要送入缓冲区时,要检查缓冲区是否有空位,若是,才可将产品送入缓冲区,并在必要时通知消费者;否则等待;
对于消费者进程:当它去取产品时,先要检查缓冲区中是否有产品可取,若有,则取走一个,并在必要时通知生产者;否则等待。
这种相互等待,并互通信息就是典型的进程同步。
同时,缓冲区是个临界资源,因此,各个进程在使用缓冲区的时候,还是个互斥问题。
信号量的定义
semaphore BufferNum;//空闲的缓冲区个数,初值为N
semaphore ProductNum;//缓冲区当中的产品个数,初值为0
semaphore Mutex;//用于互斥访问的信号量,初值为1
1 main() 2 { 3 cobegin 4 producer(); 5 consumer(); 6 coend 7 }
生产者进程
1 void producer(void) 2 { 3 int item; 4 while(TRUE) 5 { 6 item=produce_item();//制造一个产品 7 P(BufferNum);//是否有空闲缓冲区 8 P(Mutex);//进入临界区 9 insert_item(item);//产品放入缓冲区 10 V(Mutex);//离开临界区 11 V(ProductNum);//新增了一个产品 12 } 13 }
消费者进程
1 void consumer(void) 2 { 3 int item; 4 while(TRUE) 5 { 6 P(ProductNum);//缓冲区中有无产品 7 P(Mutex);//进入临界区 8 item=remove_item()//从缓冲区取产品 9 V(Mutex);//离开临界区 10 V(BufferNum);//新增一个空闲缓冲区 11 consume_item(item);//使用该产品 12 } 13 }
2)哲学家就餐问题
1965年,由Dijkstra提出并解决,后来逐渐成为该领域的一个经典问题,或者说,是一块试金石,用来试验新的进程同步方法的优劣。
每个哲学家的动作只有两种:进餐和思考。当一个哲学家感到饥饿时,他试图去获得他左边和右边的两把叉子(一次取一把,顺序无关),然后才能开始进餐。吃完以后,他需要把两把叉子放回原处,然后继续思考。
问题是:如何保证哲学家们的动作有序进行?如:不出现相邻者同时要求进餐,也不出现有人永远拿不到叉子。
方案一
1 #define N 5 //哲学家个数 2 void philosopher(int i)//哲学家编号:0-4 3 { 4 while(TRUE) 5 { 6 think();//哲学家在思考 7 take_fork(i);//去拿左边的叉子 8 take_fork((i+1)%N);//去拿右边的叉子 9 eat();//吃面条中.… 10 put_fork(i);//放下左边的叉子 11 put_fork((i+1)%N);//放下右边的叉子 12 } 13 }
问题:不正确,可能导致死锁。
方案二
1 semaphore mutex //互斥信号量,初值 2 void philosopher(int i)//哲学家编号i:0-4 3 { 4 while(TRUE) 5 { 6 think();//哲学家在思考 7 P(mutex);//进入临界区 8 take_fork(i);//去拿左边的叉子 9 take_fork((i+1)%N);//去拿右边的叉子 10 eat();//吃面条中… 11 put_fork(i);//放下左边的叉子 12 put_fork((i+1)%N);//放下右边的叉子 13 V(mutex);//退出临界区 14 } 15 }
问题:互斥访问。正确,但每次只允许一人进餐
方案2的缺点:它把就餐(而不是叉子)看成是必须互斥访问的临界资源,因此会造成(叉子)资源的浪费。从理论上说,如果有五把叉子,应允许两个不相邻的哲学家同时进餐。
哲学家就餐问题的解答
思路(1)哲学家自己怎么来解决这个问题?
指导原则:要么不拿,要么就拿两把叉子。
-S1思考中…
-S2进入饥饿状态;
-S3如果左邻居或右邻居正在进餐,等待;否则转S4
-S4拿起两把叉子;
-S5吃面条…
-S6放下左边的叉子;
-S7放下右边的叉子;
-S8新的一天又开始了,转S1
思路(2)计算机程序怎么来解决这个问题?
指导原则:不能浪费CPU时间;进程间相互通信。
-S1思考中…
-S2进入饥饿状态;
-S3如果左邻居或右邻居正在进餐,进入阻塞状态;否则转S4
-S4拿起两把叉子;
-S5吃面条..…
-S6放下左边的叉子,看看左邻居现在能否进餐(饥饿状态、两把叉子都在),若能则唤醒之;
-S7放下右边的叉子,看看右邻居现在能否进餐,若能,唤醒之;
-S8新的一天又开始了,转S1
思路(3)怎么样来编写程序?
1.必须有一个数据结构,来描述每个哲学家的当前状态;
2.该数据结构是一个临界资源,各个哲学家对它的访问应该互斥地进行——进程互斥;
一个哲学家吃饱后,可能要唤醒它的左邻右舍,两者之间存在着同步关系——进程同步;
数据结构的定义
1 #define N 5//哲学家个数 2 #define LEFT (G+N-1)%N//第个哲学家的左邻居 3 #define RIGHT (i+1)%N //第i个哲学家的右邻居 4 #define THINKING 0//思考状态 5 #define HUNGRY 1//饥饿状态 6 #define EATING 2//进餐状态 7 int state[N];//记录每个人的状态 8 semaphore mutex;//互斥信号量,初值1 9 semaphore s[N];//每人一个信号量,0
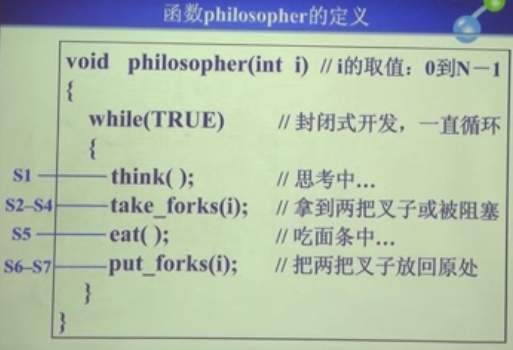
函数philosopher的定义
1 void philosopher(int i)//i的取值:0到N-1 2 { 3 while(TRUE)//封闭式开发,一直循环 4 { 5 think();//思考中… 6 take_forks(i);//拿到两把叉子或被阻塞 7 eat();//吃面条中… 8 put_forks(i);//把两把叉子放回原处 9 } 10 }
函数take_forks的定义
1 //功能:要么拿到两把叉子,要么被阻塞起来。 2 void take_forks(inti)//i的取值:0到N-1 3 { 4 P(mutex);//进入临界区 5 state[i]=HUNGRY;//我饿了! 6 test(i);//试图拿两把叉子 7 V(mutex);/退出临界区 8 P(s[i]);//没有叉子便阻塞 9 }
函数test的定义
1 void test(int i)//i的取值:0到N-1 2 { 3 if(stateli]=HUNGRY &&state[LEFT]!=EATING &&state[RIGHT]!=EATING) 4 { 5 state[i]=EATING;//两把叉子到手 6 V(s[i]);//第i人可以吃饭了 7 } 8 }
函数put_forks的定义
1 //功能:把两把叉子放回原处,并在需要的时候,去唤醒左邻右舍。 2 void put_ forks(int i)//i的取值:0到N-1 3 { 4 P(mutex);//进入临界区 5 state[i]=THINKING;//交出两把叉子 6 test(LEFT);//看左邻居能否进餐 7 test(RIGHT);//看右邻居能否进餐 8 V(mutex);//退出临界区 9 }
3)读者一写者问题
问题描述:在一个航空定票系统当中,有很多个竞争的进程想要访问(读、写)系统的数据库。
访问规则是:在任何时候,可以允许多个进程同时来读,但如果有一个进程想要更新(写)该数据库,则其他的任何进程都不能访问,包括读者和写者。问题是:怎么样来编程实现读者和写者。
问题分析
任何时候“写者”最多只允许一个,而“读者”可以有多个:
-“读一写”是互斥的;
-“写一写”是互斥的;
-“读一读”是允许的;
基于读者优先策略的方法
假设读者来:
1)若有其它读者在读,则不论是否有写者在等,新读者都可以读(读者优先):
2)若无读者、笃者,则新读者也可以读:
3)若无读者,且有写者在写,则新读者等待:
假设写者来:
1)若有读者,则新写者等待:
2)若有其它写者,则新写者等待:
3)若无读者和写者,则新写者可以写;
-需要设置一个计数器rc,用来记录并发运行的读者个数;
-对于各个读者而言,该计数器是一个临界资源,对它的访问必须互斥进行,因此设置一个互斥信号量S_mutex;
-对于各个写者而言、写者与所有的读者而言,数据库是一个临界资源,对它的访问必须互斥地进行,因此设置一个互斥信号量S_db。
读者——写者问题的一个解答
int rc=0;//并发读者的个数 semaphore S_mutex;//对rc的互斥信号量,初值1 semaphore S_db;//对数据库的信号量,初值1 void writer(void) { think_up_data();//生成数据,非临界区 P(S_db);//希望访问数据库 write_data_base();//更新数据库 V(S_db);//退出临界区 }
1 void reader(void) 2 { 3 P(S_mutex);//互斥地访问计数器rc 4 rc++;//新增了一个读者 5 if(rc=1) P(S_db);//如果是第一个读者… 6 V(S_mutex);//退出对rc的访问 7 read_data_base();//读取数据库的内容 8 P(S_mutex);//互斥地访问计数器rc 9 rc--;//减少一个读者 10 if(rc=0) V(S_db);//如果是最后一个读者 11 V(S_mutex);//退出对rc的访问 12 use_data_read();//使用数据,非临界区 13 }
测试几个例子:
RRW——R1进入,R2进入,W1在writer中P(S_db)被挡住
RWR——R1进入,W1在writer中P(S_db)被挡住,R2进入(体现了读者优先)
WRR——W1进入,R1在reader中if后的P(S_db)被挡住,R2在reader中P(S_mutex)被挡住
5.进程调度
在多道系统当中,往往有多个进程同时在内存中运行。在任何时刻,一个进程只可能是以下三种状态之一:
-运行状态:该进程正在CPU上运行,每个CPU上最多只能有一个进程在运行;
-就绪状态:进程已经就绪,随时可以运行;
-阻塞状态:如在某个信号量上被阻塞,等待I/O
与此相对应,操作系统会维护相应的状态队列。
要解决的问题
WHEN:何时分配CPU一调度的时机
WHAT:按什么原则分配CPU一调度算法
HOW:如何分配CPU一进程的上下文切换
何时调度?
1)当一个新的进程被创建时,是执行新进程还是继续执行父进程?
2)当一个进程运行完毕时;
3)当一个进程由于I/O、信号量或其他的某个原因被阻塞时;
4)当一个I/O中断发生时,表明某个I/O操作已经完成,而等待该I/O操作的进程转入就绪状态;
5)在分时系统中,当一个时钟中断发生时。
两种调度方式
不可抢占调度方式:一个进程若被选中,就一直运行下去,直到它被阻塞(I/O,或正在等待其他的进程),或主动地交出CPU。以上的情形1一3均可发生调度;
可抢占调度方式:当一个进程在运行时,调度程序可以打断它。以上的情形1-5均可发生调度。
进程切换
进程切换时需要做哪些事情?
保存CPU寄存器中的值!
调度算法(自己看)
-优先级算法(Priority Scheduling):给每个进程设置一个优先级,然后在所有就绪进程中选择优先级最高的那个进程去运行;
-SJF就是一个优先级算法,每个进程的优先级是它的CPU运行时间(时间越短,优先级越高);
-分为可抢占和不可抢占两种方式;各进程优先级的确定方式可分为静态和动态两种。
优先级的确定
-静态优先级方式
基本思路:在创建进程时确定进程的优先级,并保持不变直到进程结束;
缺点:高优先级的进程一直占用CPU,低优先级的进程“饥饿”。

-I/O繁忙进程:让其进入最高优先级队列,以及时启动/O操作。通常只需一个小时间片,即可处理完一次I/O请求,然后转入到阻塞队列。
-CPU繁忙进程:每次都执行完时间片,进入更低级队列。最终采用最大时间片来执行,减少调度次数。
第三章 死锁
安全状态与不安全状态
我们的目标:判断系统的当前状态是否安全。
如何来做?
程序=算法+数据结构
数据结构:如何来表示系统的当前状态?什么叫安全的状态?
算法:如何来判断系统的当前状态是否安全?
系统状态的表示
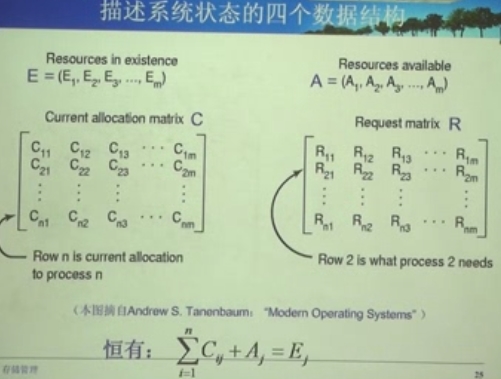
系统中有n个进程(P1到Pn),资源类型个数为m:
-向量E=(E1,E2,E3…,Em)称为总的资源向量,Ei:表示系统中第i种类型的资源个数。例如:若第一种类型的资源为打印机,则E1=2表示系统中共有2台打印机;
-向量A=(A1,A2,A3,…,Am)称为空闲资源向量,Ai:表示第i种类型的资源中,尚未被占用的个数;
-矩阵C=(Cij)n*m称为当前分配矩阵,Cij表示进程,Pi所占用的类型为j的资源个数;
-矩阵R=(Rij)n*m称为请求矩阵,Rij表示进程Pi还需要的类型为i的资源个数。
举个例子:
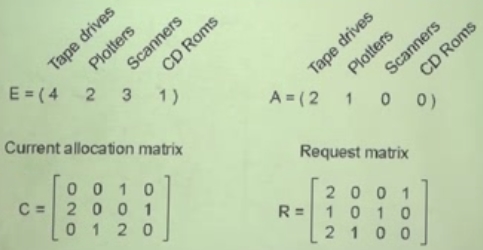
安全状态与不安全状态
一个状态被称为是“安全的”,如果它满足以下的两个条件:
1)它自身不存在着死锁问题;
2)存在着某种调度顺序,使得即使在最坏的情况下(所有的进程突然间同时请求它们最大数目的资源,即矩阵R中的数值),每一个进程都能够顺利地运行结束。
在学习操作系统时总结了笔记,并分享出来,特别是蓝色和红色字体。有问题请及时联系博主:Alliswell_WP,转载请注明出处。
posted on 2020-04-18 12:38 Alliswell_WP 阅读(372) 评论(0) 收藏 举报

 浙公网安备 33010602011771号
浙公网安备 33010602011771号