ROS中的头文件与源文件
3.2 ROS中的头文件与源文件
此节的目的是为创建大型工程做准备
这里分别介绍两种使用头文件与源文件的代码封装方式:
- 设置头文件,可执行文件作为源文件;
- 分别设置头文件,源文件与可执行文件。
下面分别使用两个例子来演示:
3.2.1 设置头文件,可执行文件作为源文件
这部分内容总共分3步:
- 编写头文件;
- 编写可执行文件(同时也是源文件);
- 编辑配置文件并执行。
需要学习者提前掌握相关C++知识。
如果缺乏C++相关的知识可以查阅我的C++学习日志专栏:
博客园
知乎
Github
- 编写头文件:
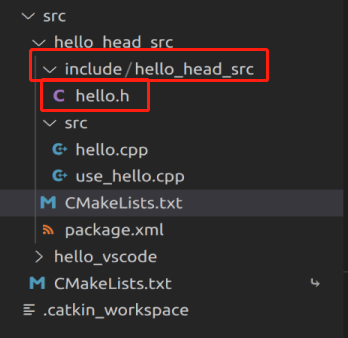
在功能包下的 include/功能包名 目录下新建头文件: hello.h,示例内容如下:
然后开始编写头文件:
#ifndef _HELLO_H
#define _HELLO_H
namespace hello_ns{
class HelloPub {
public:
void run();
};
}
#endif
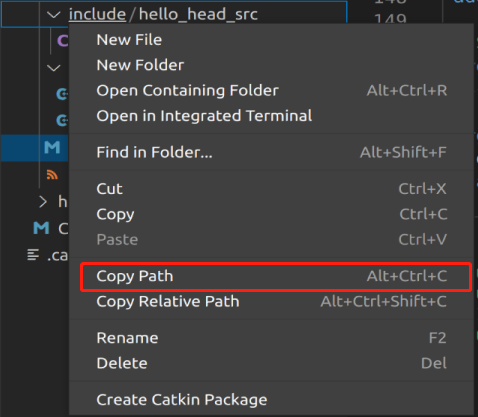
如何配置c_cpp_properties.json文件中的includepath属性,将刚才头文件的路径复制进去,防止后面再包含的时候编译器抛出异常。

- 编写可执行文件(同时也是源文件);
在src目录下新建hello.cpp文件:
#include "ros/ros.h"
#include "test_head/hello.h"
namespace hello_ns {
void HelloPub::run(){
ROS_INFO("自定义头文件的使用....");
}
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"test_head_node");
hello_ns::HelloPub helloPub;
helloPub.run();
return 0;
}
- 编辑配置文件并执行。
与之前CMakeLists.txt的配置不同的是,本次的配置添加头文件相关的配置:
include_directories(
include
${catkin_INCLUDE_DIRS}
)
可执行配置文件配置方式与之前一致:
add_executable(hello src/hello.cpp)
add_dependencies(hello ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(hello
${catkin_LIBRARIES}
)
最后编译执行:
输出:
[ INFO] [1629340364.149575292]: 自定义头文件的使用....
3.2.2 分别设置头文件,源文件与可执行文件
这个方法相对于上一个方法,在CMakeList.txt内的配置较为复杂。
这部分内容总共分4步:
-
编写头文件;
-
编写源文件;
-
编写可执行文件;
-
编辑配置文件并执行。
-
编写头文件(与上一个方法的内容相同)
#ifndef _HAHA_H
#define _HAHA_H
namespace hello_ns {
class My {
public:
void run();
};
}
#endif
- 编写源文件(即方案 1 中的函数,这里作为另外一个文件放在与主函数相同的目录下)
c_cpp_properties.json方面的配置与上面相同。
然后在src目录下创建hello.cpp文件:
#include "test_head_src/haha.h"
#include "ros/ros.h"
namespace hello_ns{
void My::run(){
ROS_INFO("hello,head and src ...");
}
}
- 编写可执行文件(即主函数)
#include "ros/ros.h"
#include "test_head_src/haha.h"
int main(int argc, char *argv[])
{
ros::init(argc,argv,"hahah");
hello_ns::My my;
my.run();
return 0;
}
- 编辑配置文件并执行。
学过 C++ 的同学都知道, 对于多个文件,我们需要为文件创建链接。下面对于 CMakeList.txt 的配置主要目的也是为编译器添加多个文件的链接。
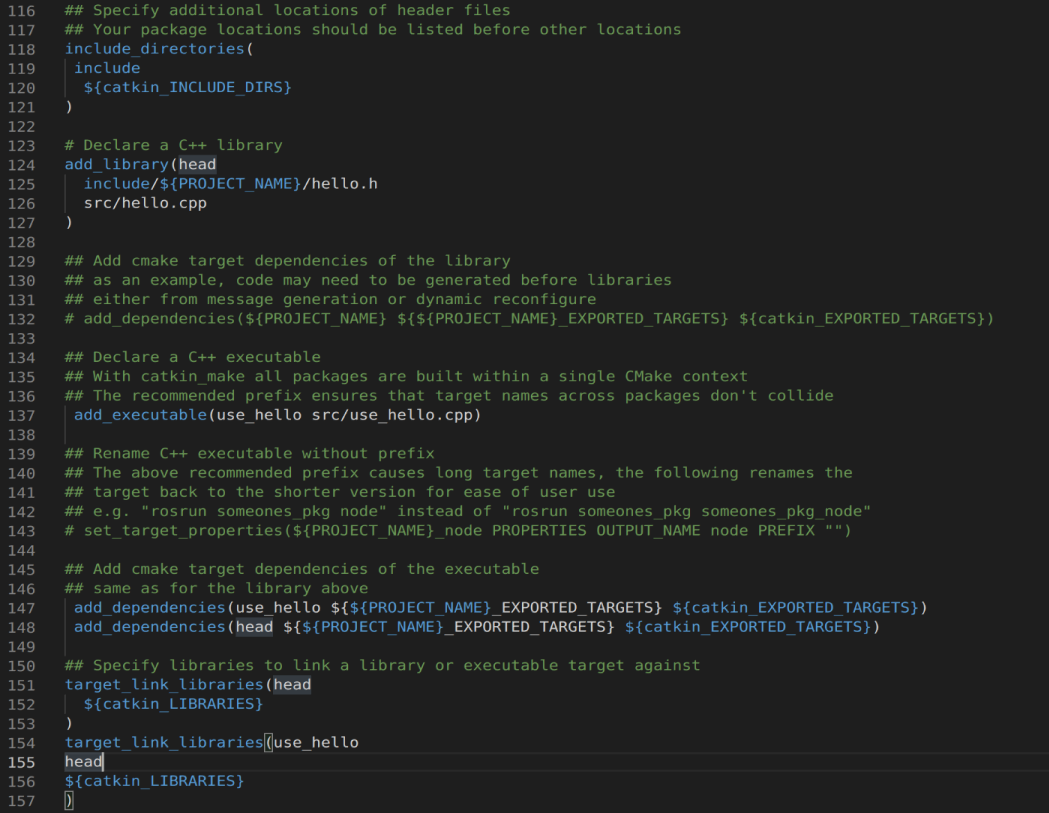
头文件与源文件相关的配置内容如下:
include_directories(
include
${catkin_INCLUDE_DIRS}
)
## 声明C++库
add_library(head
include/test_head_src/haha.h
src/haha.cpp
)
add_dependencies(head ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(head
${catkin_LIBRARIES}
)
可执行文件配置基本上还是老三样,唯一不同的地方是创建了链接库,将源文件所在的库与可执行文件创建了链接。
add_executable(use_head src/use_head.cpp)
add_dependencies(use_head ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
#此处需要添加之前设置的 head 库
target_link_libraries(use_head
head
${catkin_LIBRARIES}
)
弄完后,CMakeList.txt就是下面的样子:
一点建议:英文好的同学有空可以多读读CMakeList文件的注释,对于以后创建工程会很有帮助。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号