ROS - 服务通信
第二章 ROS的通信机制(重点)
第二节 服务通信
服务通信时基于请求响应模式的,是一种应答机制。也就是一个节点A向另外一个节点B发送请求,B接收处理请求并产生相应结果返回给A。比如下面的应用场景:
机器人巡逻过程中,控制系统分析传感器数据发现可疑物体或人... 此时需要拍摄照片并留存。
在上述场景中,就使用到了服务通信。一个节点需要向相机节点发送拍照请求,相机节点处理请求,并返回处理结果。
与上述应用类似的,服务通信更适用于对实时性有要求、具有一定逻辑处理的应用场景。
2.2.1 理论模型
模型中包含3个角色:
- Master ---> 管理者
- Server ---> 服务端
- Client ---> 客户端
框图:
其主要流程如下:
- 服务端注册自身信息;
- 客户端请求服务;
- 管理者匹配话题,并把服务端的地址给客户端;
- 客户端与客户端建立连接,请求数据;
- 服务端产生相应。
注意:
- 保证顺序,客户端发起请求时,服务端必须已启动。
- 客户端和服务端都可以存在多个。
关注点:
- 流程已经被封装了,直接调用就可以了;
- 话题;
- 服务端;
- 客户端;
- 数据载体。
2.2.2 一个案例
需求:编写服务通信,客户端提交两个整数至服务端,服务端求和并响应结果到客户端。
2.2.3 编写 srv 文件
- 为案例创建一个功能包:
这个不多介绍了。
- 在功能包下创建一个
srv文件夹,并在其中创建xxx.srv文件。

- 修改配置文件:
在package.xml中添加srv(也是msg)相关的编译依赖和执行依赖:
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>
在CMakeLists.txt中添加srv相关配置:
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
# 需要加入 message_generation,必须有 std_msgs
add_service_files(
FILES
AddInts.srv
)
generate_messages(
DEPENDENCIES
std_msgs
)
- 编译文件:
编译后在(.../工作空间/devel/include/包名/xxx.h)路径下会自动生成一些中间文件。
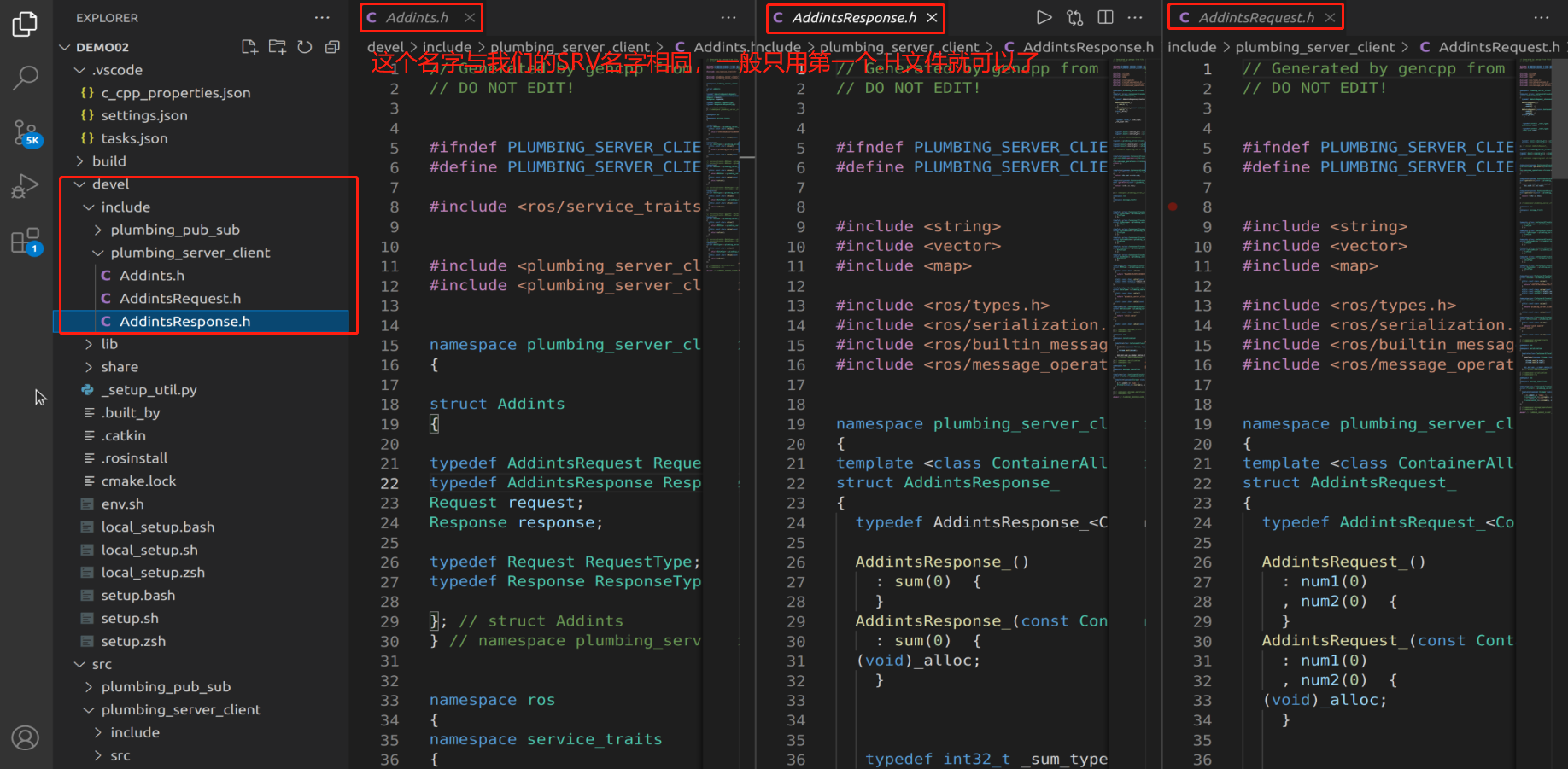
到这里,我们自定义的一个srv就完成了。
2.2.4 编写服务端节点
- 编写服务端节点:
#include "ros/ros.h"
#include "plumbing_server_client/Addints.h"
/*
服务端实现:解析客户端提交的数据,并运算再产生响应
1. 包含头文件;
2. 初始化ROS节点;
3. 创建节点句柄;
4. 创建一个服务对象;
5. 处理请求并产生相应;
6. spin()
*/
bool doNums(plumbing_server_client::Addints::Request &request,
plumbing_server_client::Addints::Response &response)
{
// 1. 处理请求
int num1 = request.num1;
int num2 = request.num2;
ROS_INFO("收到的数据是:num1 = %d, num2 = %d", num1, num2);
// 2. 组织响应
int sum = num1 + num2;
response.sum = sum;
ROS_INFO("求和结果是:sum = %d", sum);
return true;
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2. 初始化ROS节点;
ros::init(argc,argv,"Heishui"); // 节点名称需要保证唯一
// 3. 创建节点句柄;
ros::NodeHandle nh;
// 4. 创建一个服务对象;
ros::ServiceServer server = nh.advertiseService("Addints",doNums);
ROS_INFO("服务器启动");
// 5. 处理请求并产生相应;
// 6. spin()
ros::spin();
return 0;
}
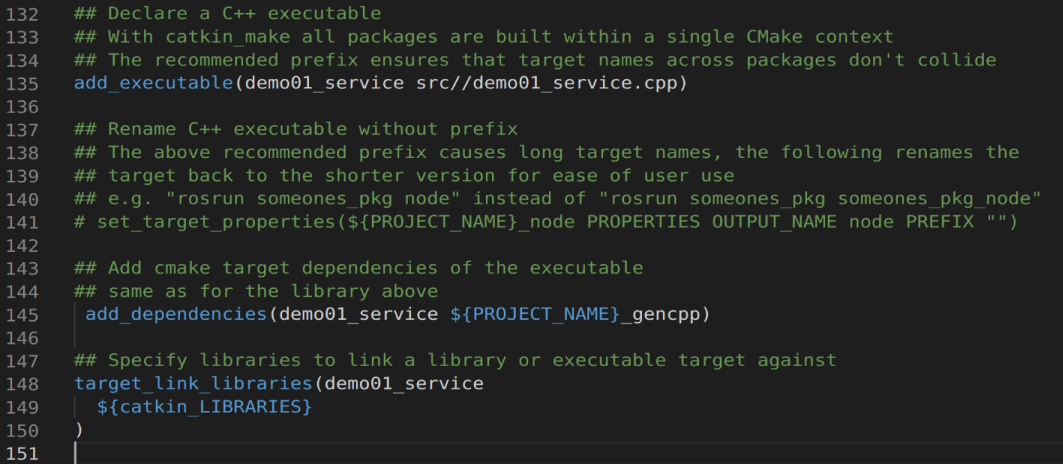
- 修改
CMakeLists.txt:
老生常谈的修改方式,把节点和功能包添加到CMakeList.txt
- 编译 + 运行:
ctrl + shift + B 编译。然后运行节点。
首先roscore
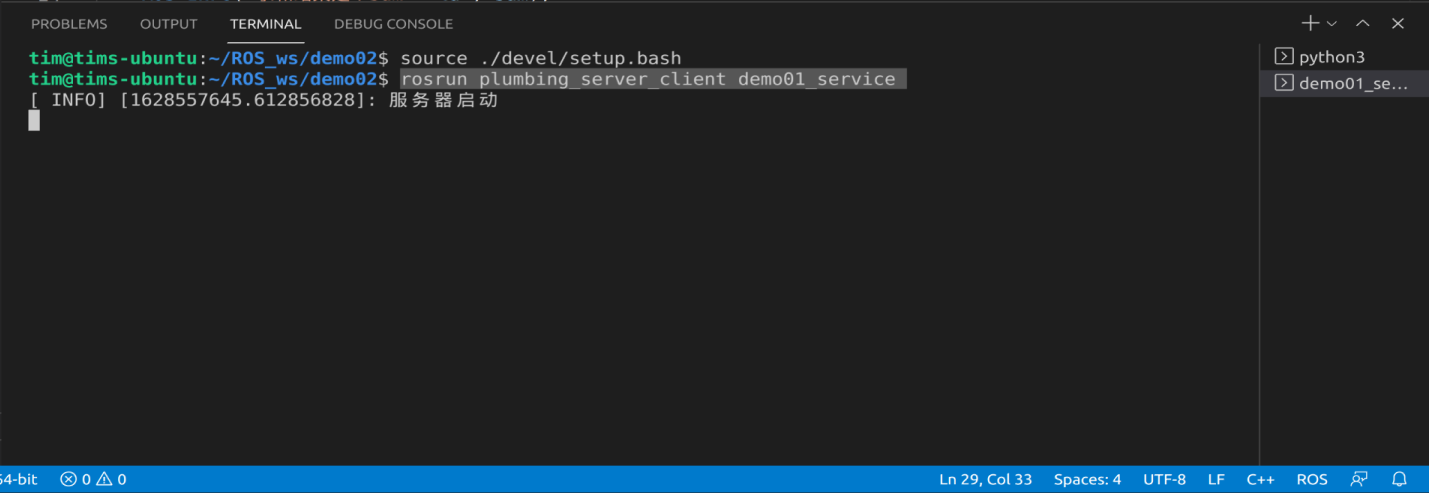
然后打开一个新的终端,运行服务端节点:
source ./devel/setup.bash
rosrun plumbing_server_client demo01_service
- 使用ROS指令来接收服务:
首先,右击terminal将其页面分割成两个,方便我们同时查看客户端和服务端。

然后,在新的terminal中输入:
source ./devel/setup.bash
rosservice call Addints [tab]
上面的代码中Addints是我命名的服务端节点,输入完按键盘上的tab键自动补齐,然后就出现了我们的请求服务端是需要输入的两个数字。

终端里可以的两个数字可以自行修改(Ubuntu的终端不能直接用鼠标点,需要用键盘的左右方向键)
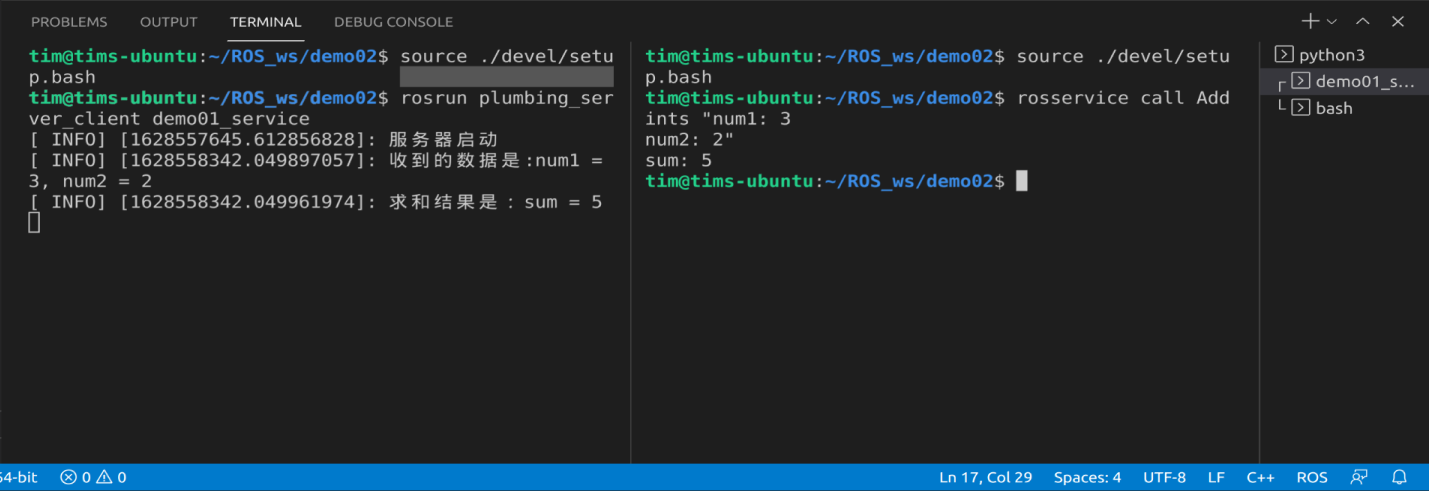
看到这个,我们就可以确定服务端编写成功!
2.2.5 编写客户端节点
- 编写用户端:
对照着服务端进行编写就可以了:
#include "ros/ros.h"
#include "plumbing_server_client/Addints.h"
/*
客户端:提交两个整数,并处理相应的结果。
1. 包含头文件;
2. 初始化ROS节点;
3. 创建节点句柄;
4. 创建一个客户端对象;
5. 提交请求并处理响应;
*/
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 2. 初始化ROS节点;
ros::init(argc,argv,"Dabao");
// 3. 创建节点句柄;
ros::NodeHandle nh;
// 4. 创建一个客户端对象;
ros::ServiceClient client = nh.serviceClient<plumbing_server_client::Addints>("Addints");
// 5. 提交请求并处理响应;
plumbing_server_client::Addints ai;
// 5-1. 组织请求
ai.request.num1 = 100;
ai.request.num2 = 200;
// 5-2. 处理响应
bool flag = client.call(ai);
if (flag)
{
ROS_INFO("响应成功!");
// 获取结果
ROS_INFO("两数之和是:%d",ai.response.sum);
}
else
ROS_INFO("处理失败!");
return 0;
}
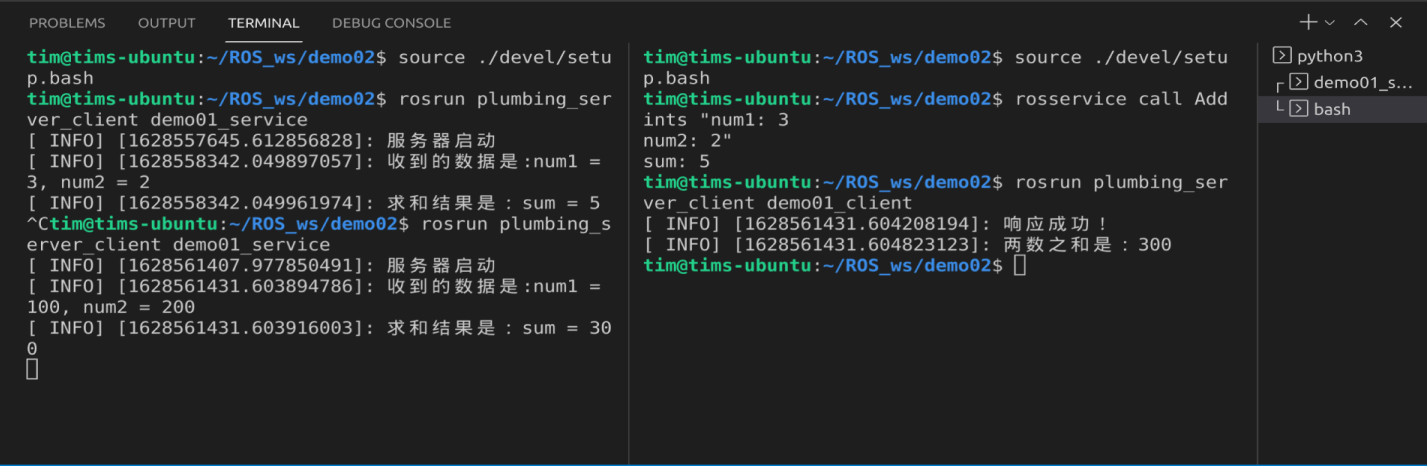
-
修改
CMakeLists.txt: -
编译 + 运行:
这里之间放运行结果:
2.2.5 优化客户端节点
- 要让命令输入的时候可以传参,就要用到
main()括号中的argc, argv了那么我们在客户端主函数体的最前面写入:
// 优化实现,获取命令中的参数:
if(argc != 3)
{
ROS_INFO("提交的参数数量不正确!");
return 1;
}
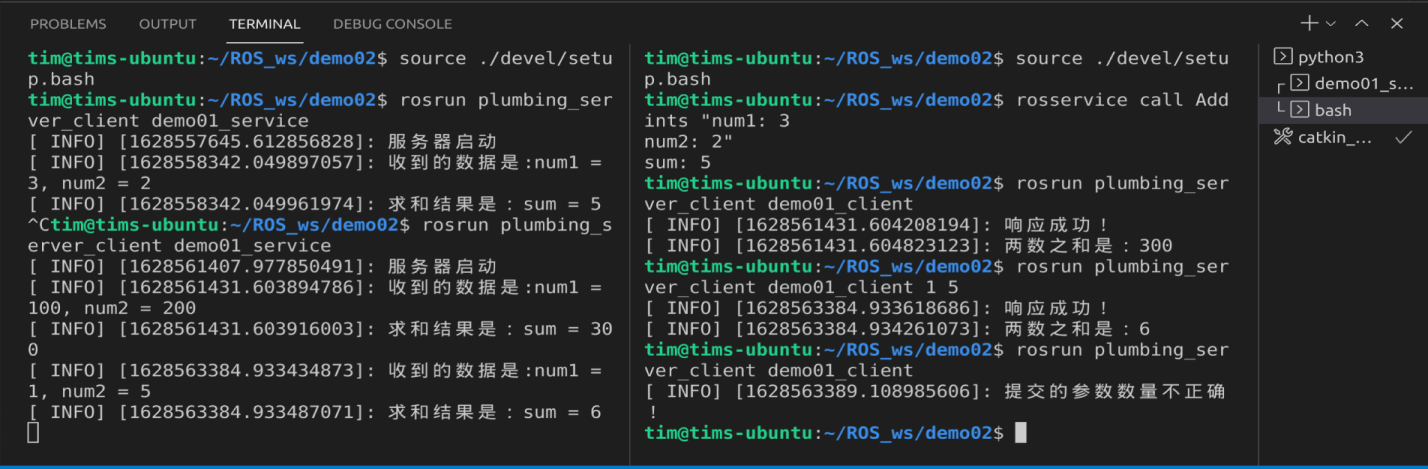
这一部分是要求命令必须传入3个参数,否则之间就返回了。着三个参数分别是: 节点名,num1和num2。
写完后,我们把后面的组织请求处修改一下:
// 5-1. 组织请求
ai.request.num1 = atoi(argv[1]);
ai.request.num2 = atoi(argv[2]);
让请求的ai的两个值分别传入两个参数。
我们输入下次命令,看一下结果:
rosrun plumbing_server_client demo01_client 1 5
和
rosrun plumbing_server_client demo01_client
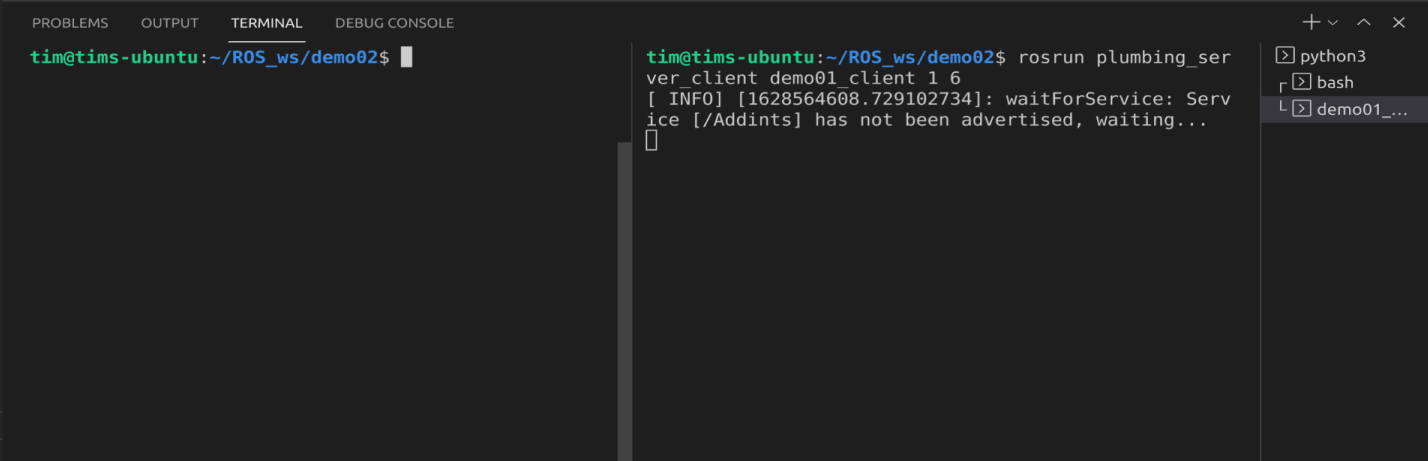
- 我们之前说过,在服务通信的方式中,一定要先启动服务器,但是有时我们使用
launch启动一堆节点的时候,先后顺序也许就不对了,为了避免之间报错,我们需要再次优化客户端节点
在ROS中,有2个函数可以做到让客户端启动后挂起,等待服务器启动。
// 函数1
client.waitForExistence();
// 函数2
ros::service::waitForService("服务器的节点名称");
这两个函数选择其中一个就可以了,位置是放在判断响应之前。那么这个完整的服务器函数就如下:
#include "ros/ros.h"
#include "plumbing_server_client/Addints.h"
/*
客户端:提交两个整数,并处理相应的结果。
1. 包含头文件;
2. 初始化ROS节点;
3. 创建节点句柄;
4. 创建一个客户端对象;
5. 提交请求并处理响应;
实现参数的动态提交:
1. 格式: rosrun xxx xxx 12 32
2. 节点执行时,需要获取命令中的参数,并组织进 request
问题:
如果先启动客户端,那么就会请求异常
需求:
如果先启动客户端,不要直接抛出异常,而是挂起,等在服务器启动后再正常请求
解决:
ROS中的内置函数可以让客户端启动后挂起,等待服务器启动。
*/
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
// 优化实现,获取命令中的参数:
if(argc != 3)
{
ROS_INFO("提交的参数数量不正确!");
return 1;
}
// 2. 初始化ROS节点;
ros::init(argc,argv,"Dabao");
// 3. 创建节点句柄;
ros::NodeHandle nh;
// 4. 创建一个客户端对象;
ros::ServiceClient client = nh.serviceClient<plumbing_server_client::Addints>("Addints");
// 5. 提交请求并处理响应;
plumbing_server_client::Addints ai;
// 5-1. 组织请求
ai.request.num1 = atoi(argv[1]);
ai.request.num2 = atoi(argv[2]);
// 5-2. 处理响应
// 调用判断服务器状态的函数
// 函数1
//client.waitForExistence();
// 函数2
ros::service::waitForService("Addints");
bool flag = client.call(ai);
if (flag)
{
ROS_INFO("响应成功!");
// 获取结果
ROS_INFO("两数之和是:%d",ai.response.sum);
}
else
ROS_INFO("处理失败!");
return 0;
}
当我们先启动客户端后启动服务端的结果是: