
Rodrigues 罗德里格斯旋转的用途和实现
关于刚体旋转,有两种实现途径: 一个是轴角/四元数旋转,一个是欧拉角+旋转矩阵。 罗德里格斯是轴角旋转出发,但可以清晰地推导出旋转矩阵的形式,所以大致起一个桥梁作用。
关于要解决的问题: 给定一个向量 V(或空间坐标点),旋转轴 k,绕轴旋转的角度 theta,则可以求得旋转后向量(空间点坐标)V_rot。
【实际情形: 知道旋转前后两个平面的法向量和两个平面的位移,求对应的旋转矩阵】
旋转公式如下:

旋转矩阵如下:

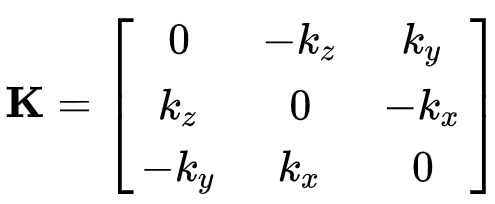
其中K矩阵是旋转轴k向量的反对称矩阵:
旋转轴和旋转角,这就是轴角法/四元数的组成,因此,罗德里格斯公式建立了轴角法/四元数到旋转矩阵之间的转化关系,旋转矩阵求出之后,欧拉角也就同样求出来了。
罗德里格斯公式更加方便之处在于,在这种情况下,可以不用四元数的计算, 直接利用此公式对向量进行旋转,十分的方便。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号