

大角度非迭代的空间坐标旋转C#实现
 在前面文章中提到空间直角坐标系相互转换,测绘坐标转换时,一般涉及到的情况是:两个直角坐标系的小角度转换。但,当两个坐标系对应轴的旋转角度增加到一定程度时,则无法使用低阶的泰勒级数展开,且迭代的计算量、精度、速度无法取得平衡。本文将介绍罗德里格矩阵的基本原理和C#实现,并用实例证明解算的有效性。
在前面文章中提到空间直角坐标系相互转换,测绘坐标转换时,一般涉及到的情况是:两个直角坐标系的小角度转换。但,当两个坐标系对应轴的旋转角度增加到一定程度时,则无法使用低阶的泰勒级数展开,且迭代的计算量、精度、速度无法取得平衡。本文将介绍罗德里格矩阵的基本原理和C#实现,并用实例证明解算的有效性。
1. 绪论
在前面文章中提到空间直角坐标系相互转换,测绘坐标转换时,一般涉及到的情况是:两个直角坐标系的小角度转换。这个就是我们经常在测绘数据处理中,WGS-84坐标系、54北京坐标系、80西安坐标系、国家2000坐标系之间的转换。
所谓小角度转换,指直角坐标系\(XOY\)和直角坐标系\(X'O'Y'\)之间,对应轴的旋转角度很小,满足泰勒级数展开后的线性模型。
常见的三维坐标转换模型有[1]:
- 布尔沙模型
- 莫洛琴斯基模型
- 范式模型
但,当两个坐标系对应轴的旋转角度增加到一定程度时,则无法使用低阶的泰勒级数展开,且迭代的计算量、精度、速度无法取得平衡[2]。存在以下缺点:
- 仅适用于满足近似处理的小角度转换
- 设计复杂的三角函数运算
- 需要迭代计算
罗德里格矩阵是摄影测量中的常见方法,在该方法中,不需要进行三角函数的计算和迭代运算。计算过程简单明了,易于编程实现。不仅适用于小角度的坐标转换,也适用于大角度的空间坐标转换。
本文将介绍罗德里格矩阵的基本原理和C#实现,并用实例证明解算的有效性。
2. 罗德里格矩阵坐标转换原理
2.1 坐标转换基本矩阵
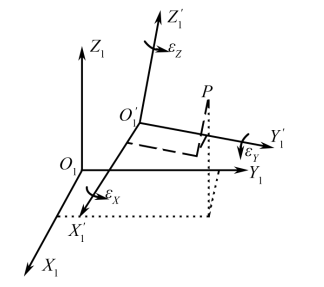
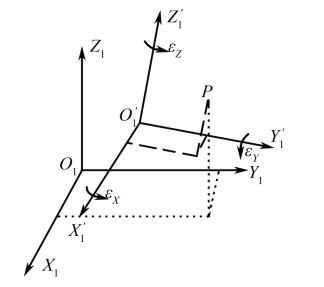
两个空间直角坐标系分别为\(XOY\)和\(X'O'Y'\),坐标系原点不一致,存在三个平移参数\(\Delta X\)、\(\Delta Y\)、\(\Delta Z\)。它们间的坐标轴也相互不平行,存在三个旋转参数\(\epsilon x\)、\(\epsilon y\)、\(\epsilon z\)。同一点A在两个坐标系中的坐标分别为\((X,Y,Z)\)和\((X',Y',Z')\)。
显然,这两个坐标系通过坐标轴的平移和旋转变换可取得,坐标间的转换关系如下:
其中,\(\lambda\)是比例因子,\(R\left(\varepsilon_Y\right) R\left(\varepsilon_X\right) R\left(\varepsilon_Z\right)\)分别是绕Y轴,X轴,Z轴的旋转矩阵。注意,旋转的顺序不同,\(R\) 的表达形式不同。
习惯上称\(R\)为旋转矩阵,\([\Delta X,\Delta Y,\Delta Z]^T\)为平移矩阵。只要求出\(\Delta X\)、\(\Delta Y\) 、\(\Delta Z\),\(\varepsilon_X\)、\(\varepsilon_Y\)、\(\varepsilon_Z\),这7个转换参数,或者直接求出旋转矩阵和平移矩阵,就可以实现两个坐标系间的转换。
2.2 计算技巧-重心矩阵
为计算方便,对所用到的坐标进行重心化处理。将两个坐标系的公共点的坐标均化算为以重心为原点的重心化坐标。分别记为\((\bar{X}, \bar{Y}, \bar{Z})\) 和 \(\left(\bar{X}^{\prime}, \bar{Y}^{\prime}, \bar{Z}^{\prime}\right)\) 。两个坐标系的重心的坐标分别为 \((X_g, Y_g, Z_g)\) 和 \((X'_g, Y'_g, Z'_g)\) 。
因此,可以将式(1)变为:
因而,转换参数可分两步来求解。先用式(2)求出旋转参数和比例因子,再用式(,3)求出平移参数。
2.3 基于罗德里格斯矩阵的转换方法
对式(2)两边取2-范数,由于\(\lambda > 0\),旋转矩阵为正交阵的特性,可得:
对于n个公共点,可得\(\lambda\)的最小均方估计:
得到比例因子的最小均方估计后,可将旋转矩阵 \(R\) 表示为:
其中,\(I\)为单位矩阵,\(S\)为反对称矩阵。将式(5)带入式(3),可得:
3. C#代码实现
矩阵运算使用MathNet.Numerics库,初始化字段MatrixBuilder<double> mb = Matrix<double>.Build和VectorBuilder<double> vb = Vector<double>.Build
3.1 计算矩阵重心坐标
Vector<double> BarycentricCoord(Matrix<double> coordinate)
{
Vector<double> barycentric = vb.Dense(3, 1);
int lenCoord = coordinate.ColumnCount;
if (lenCoord > 2)
barycentric = coordinate.RowSums();
barycentric /= lenCoord;
return barycentric;
}
3.2 计算比例因子
取2-范数使用点乘函数PointwisePower(2.0):
double ScaleFactor(Matrix<double> sourceCoord, Matrix<double> targetCoord)
{
double k = 0;
double s1 = 0;
double s2 = 0;
Vector<double> sourceColL2Norm = sourceCoord.PointwisePower(2.0).ColumnSums();
Vector<double> targetColL2Norm = targetCoord.PointwisePower(2.0).ColumnSums();
int lenSourceCoord = sourceCoord.ColumnCount;
int lenTargetCoord = targetCoord.ColumnCount;
//只有在目标矩阵和源矩阵大小一致时,才能计算
if (lenSourceCoord == lenTargetCoord)
{
s1 = sourceColL2Norm.PointwiseSqrt().PointwiseMultiply(targetColL2Norm.PointwiseSqrt()).Sum();
s2 = sourceColL2Norm.Sum();
}
k = s1 / s2;
return k;
}
3.3 计算罗德里格参数
这里的罗德里格参数就是式(6)中的\([a, b, c]^T\)。
Vector<double> RoderickParas(double scalceFactor, Matrix<double> sourceCoord, Matrix<double> targetCoord)
{
Vector<double> roderick = vb.Dense(new double[] { 0, 0, 0 });
int lenData = sourceCoord.ColumnCount;
//常系数矩阵
var lConstant = vb.Dense(new double[3 * lenData]);
//系数矩阵
var coefficient = mb.DenseOfArray(new double[3 * lenData, 3]);
//构造相应矩阵
for (int i = 0; i < lenData; i++)
{
lConstant[3 * i] = targetCoord[0, i] - scalceFactor * sourceCoord[0, i];
lConstant[3 * i + 1] = targetCoord[1, i] - scalceFactor * sourceCoord[1, i];
lConstant[3 * i + 2] = targetCoord[2, i] - scalceFactor * sourceCoord[2, i];
coefficient[3 * i, 0] = 0;
coefficient[3 * i, 1] = -(targetCoord[2, i] + scalceFactor * sourceCoord[2, i]);
coefficient[3 * i, 2] = -(targetCoord[1, i] + scalceFactor * sourceCoord[1, i]);
coefficient[3 * i + 1, 0] = -(targetCoord[2, i] + scalceFactor * sourceCoord[2, i]);
coefficient[3 * i + 1, 1] = 0;
coefficient[3 * i + 1, 2] = targetCoord[0, i] + scalceFactor * sourceCoord[0, i];
coefficient[3 * i + 2, 0] = targetCoord[1, i] + scalceFactor * sourceCoord[1, i];
coefficient[3 * i + 2, 1] = targetCoord[0, i] + scalceFactor * sourceCoord[0, i];
coefficient[3 * i + 2, 2] = 0;
}
roderick = coefficient.TransposeThisAndMultiply(coefficient).Inverse() * coefficient.Transpose() * lConstant;
return roderick;
}
3.4 解析罗德里格矩阵
此处,就是式(5)的实现。
/// <summary>
/// 解析罗德里格矩阵为旋转矩阵和平移矩阵
/// </summary>
/// <param name="scaleFactor">比例因子</param>
/// <param name="roderick">罗德里格矩阵</param>
/// <param name="coreSourceCoord">原坐标系坐标</param>
/// <param name="coreTargetCoord">目标坐标系坐标</param>
/// <returns></returns>
(Matrix<double>, Vector<double>) RotationMatrix(double scaleFactor, Vector<double> roderick, Vector<double> coreSourceCoord, Vector<double> coreTargetCoord)
{
Matrix<double> rotation = mb.DenseOfArray(new double[,]
{
{0,0,0 },
{0,0,0 },
{0,0,0 }
});
//反对称矩阵
Matrix<double> antisymmetric = mb.DenseOfArray(new double[,]
{
{ 0, -roderick[2], -roderick[1] },
{roderick[2], 0, -roderick[0] },
{roderick[1], roderick[0], 0 }
});
// 创建单位矩阵
// 然后与式(5)的 S 执行 + 和 - 操作
rotation = (DenseMatrix.CreateIdentity(3) - antisymmetric).Inverse() * (DenseMatrix.CreateIdentity(3) + antisymmetric);
translation = coreTargetCoord - scaleFactor * rotation * coreSourceCoord;
return (rotation, translation);
}
3.5 调用逻辑
// 1. 字段值准备
MatrixBuilder<double> mb = Matrix<double>.Build;
VectorBuilder<double> vb = Vector<double>.Build;
// 2. 写入源坐标系的坐标。注意这里的x,y,z输入顺序
Matrix<double> source = mb.DenseOfArray(new double[,]
{
{-17.968, -12.829, 11.058 },
{-0.019 , 7.117, 11.001 },
{0.019 , -7.117, 10.981 }
}).Transpose();
// 3. 写入目标坐标系的坐标
Matrix<double> target = mb.DenseOfArray(new double[,]
{
{ 3392088.646,504140.985,17.958 },
{ 3392089.517,504167.820,17.775 },
{ 3392098.729,504156.945,17.751 }
}).Transpose();
// 4. 重心化
var coreSource = BarycentricCoord(source);
var coreTarget = BarycentricCoord(target);
var sourceCoords = source - mb.DenseOfColumnVectors(coreSource, coreSource, coreSource);
var targetCoords = target - mb.DenseOfColumnVectors(coreTarget, coreTarget, coreTarget);
// 5. 求比例因子
double k = ScaleFactor(sourceCoords, targetCoords);
// 6. 解算咯德里格参数
var roderick = RoderickParas(k, sourceCoords, targetCoords);
// 7. 旋转
(Matrix<double> ro, Vector<double> tran) = RotationMatrix(k, roderick, coreSource, coreTarget);
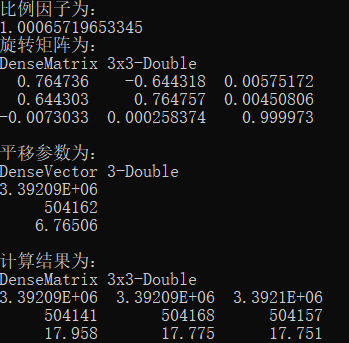
Console.WriteLine("比例因子为:");
Console.WriteLine(k);
Console.WriteLine("旋转矩阵为:");
Console.WriteLine(ro.ToString());
Console.WriteLine("平移参数为:");
Console.WriteLine(tran.ToString());
Console.WriteLine("计算结果为:");
Console.WriteLine(source2.ToString());
4. 总结
基于罗德里格矩阵的转换方法,在求解两个坐标系间的转换参数,特别是旋转角较大时,实现简单、快速。
-------------------------------------------
个性签名:独学而无友,则孤陋而寡闻。做一个灵魂有趣的人!
如果觉得这篇文章对你有小小的帮助的话,记得在右下角点个“推荐”哦,博主在此感谢!
万水千山总是情,打赏一分行不行,所以如果你心情还比较高兴,也是可以扫码打赏博主,哈哈哈(っ•̀ω•́)っ✎⁾⁾!
