(工程)坐标转换类别和方法
 在上一篇文章中,讲到了经纬度坐标转换为工程坐标,其中不可避免的涉及到坐标系之间转换参数的求解。在工程中时常使用不同的坐标转换方法。但在实际的工程中,我们使用的方法有以下几种:
1. 三参数转换法
2. 七参数转换法
3. 四参数转换+高程拟合
4. 一步法
5. 校正参数
结合工程中使用条件,他们被简化、组合,从而形成了以上5种不同的坐标系转换方法(叫法)。接下来对5种方法坐标转换的原理、使用条件做出总结和资料聚合。
在上一篇文章中,讲到了经纬度坐标转换为工程坐标,其中不可避免的涉及到坐标系之间转换参数的求解。在工程中时常使用不同的坐标转换方法。但在实际的工程中,我们使用的方法有以下几种:
1. 三参数转换法
2. 七参数转换法
3. 四参数转换+高程拟合
4. 一步法
5. 校正参数
结合工程中使用条件,他们被简化、组合,从而形成了以上5种不同的坐标系转换方法(叫法)。接下来对5种方法坐标转换的原理、使用条件做出总结和资料聚合。
1. 绪论
在上一篇文章中,讲到了经纬度坐标转换为工程坐标,其中不可避免的涉及到坐标系之间转换参数的求解。在工程中时常使用不同的坐标转换方法。武汉大学张晓东课题组的此篇文章,空间坐标与投影系统系列(三):坐标转换,详细阐述了坐标转换的定义和一般方法。
但在实际的工程中,我们使用的方法有以下几种:
- 三参数转换法
- 七参数转换法
- 四参数转换+高程拟合
- 一步法
- 校正参数
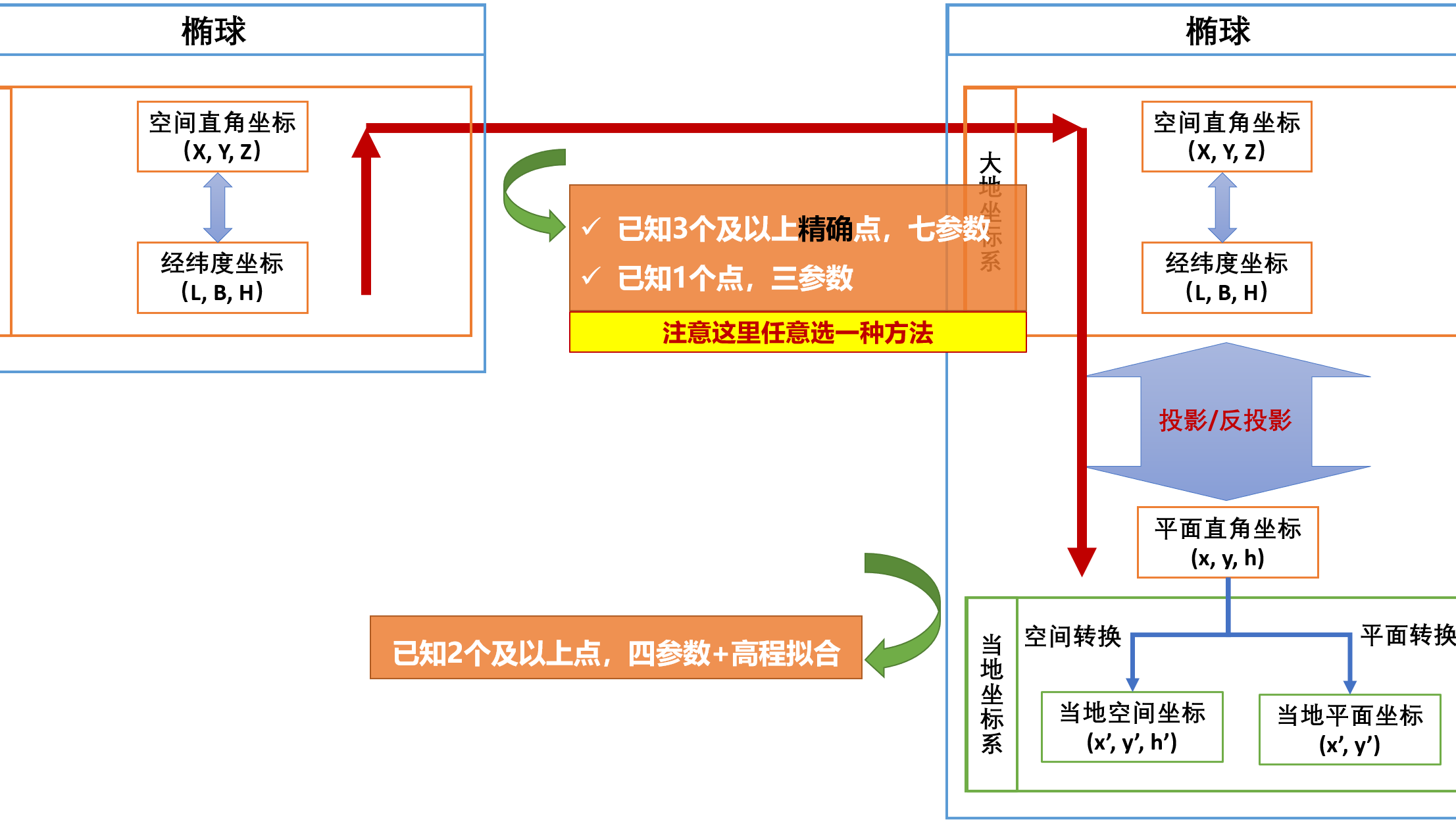
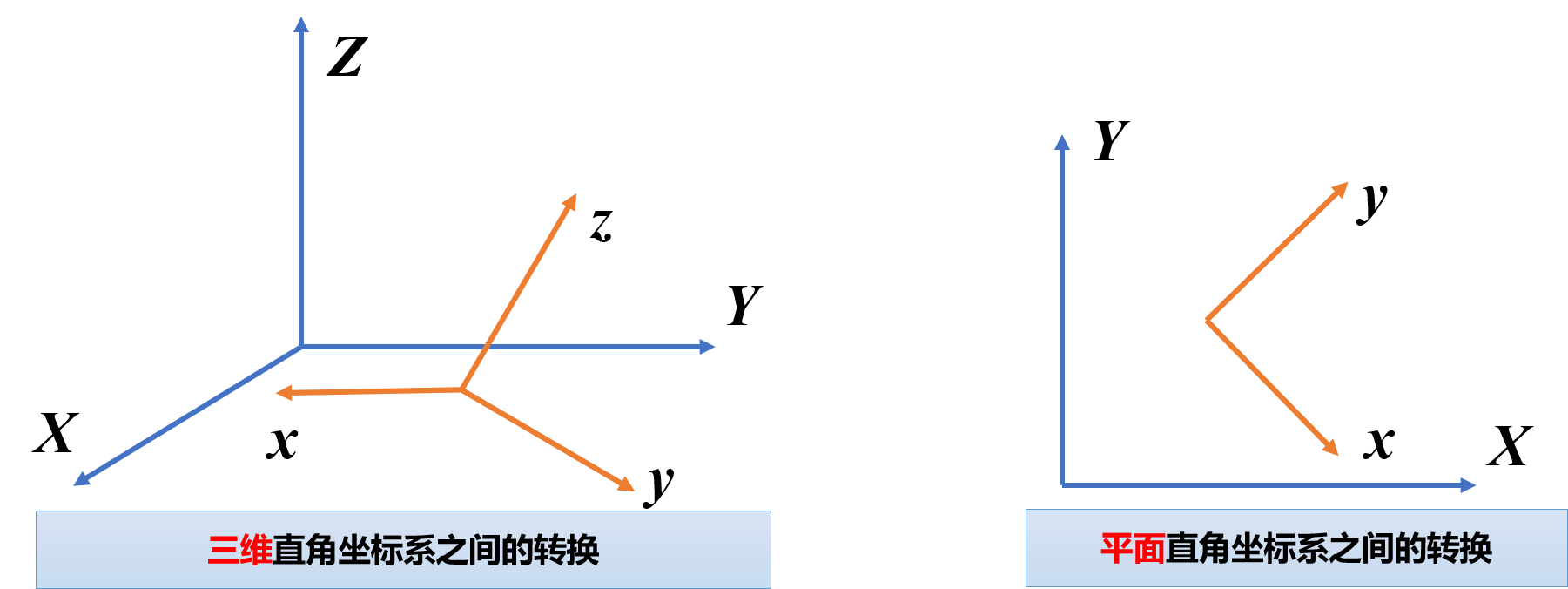
他们本质上是两种类型,
- 两个三维直角坐标系之间的转换 ——>7个参数
- 两个平面直角坐标系之间的转换 ——>4个参数
结合工程中使用条件,他们被简化、组合,从而形成了以上5种不同的坐标系转换方法(叫法)。接下来对5种方法坐标转换的原理、使用条件做出总结和资料聚合。
2. 三参数法
三参数,是指坐标系的 X、Y、Z三个轴的平移参数\(\Delta x, \Delta y, \Delta z\)。是七参数方法的简化。
要求已知一个国家坐标点即可。因此,这一个点的坐标对应值相减,即可得到这三个参数\(\Delta x, \Delta y, \Delta z\)。
这种转换方式多运用于信标,SBAS,固定差改正以及精度要求不高的地方即最远点间的距离不大于30Km[1]。在RTK模式下,作用距离在5km范围较平坦的地方(基站开机模式)。随着移动站离基准站距离的增加,精度越来越低,一般3km精度能在5cm以内。
3. 七参数法
七参数法,是指坐标系X、Y、Z三个轴的平移参数\(\Delta x, \Delta y, \Delta z\),加上三个轴的旋转\(\theta_x, \theta_y, \theta_z\),再加上尺度参数\(m\)。
至少三个已知坐标点,已知点可以是国家坐标系下的坐标,或着是与WGS-84坐标系之间存在很小旋转坐标系下的坐标,4个点时,可以检验已知点的正确性。此方法解算模型严谨,因此要求已知点的坐标精度高,一般在大范围作业时使用,当已知点精度不高时,不推荐使用七参数。
3.1 布尔莎模型
七参数法,本质上是两个三维直角坐标系之间的转换。当两个直角坐标系的三个轴旋转变换很小时,才能够使用[2]。公式如下:
3.2 代码实现
关于布尔莎模型的代码实现,网上很多例子,python、C++都有实现,不在赘述。
3.3 大角度坐标系七参数计算
当两个直角坐标系三个轴旋转变换\(\theta_x, \theta_y, \theta_z\)不在是微小量时,上述布尔莎模型模型就失效了,一般工程中并不会设计此问题。但也不排除一些特殊情况下,需要计算大角度坐标系转换七参数,多在学术研究中体现。知网上能检索到一大把,但一般都需要迭代实现[3]。
4. 四参数+高程拟合
4.1 四参数
四参数,是指 两个平面直角坐标系之间的参数,X、Y轴平移参数\(\Delta x, \Delta y\),加上坐标轴旋转参数\(\theta\),再加上尺度因子\(K\)。
要求两个任意坐标点,精度在小范围内可靠。
四参数求解,相对简单,很多博客也做出很好的解答,同时也有代码实现:
4.2 高程拟合
上述四参数求解后,对于高程,没有继续深入的讲解,因为四参数本质上是平面的坐标转换。但工程中不可缺少高程的求解。对于不同的条件,也就是不同数量的已知点,我们可以使用不同的高程拟合方式。
这里,我并不会详细的讲述测量中高程的定义,因为它包含正高和正常高,是高程系统之间的转换。只需要知道需要高程转换这么一个步骤。
4.3 高程拟合方法
高程拟合常用方法有以下四种:
- 固定差改正:接收机测到的高程加上固定常数作为使用高程,常数可以为负数。
- 平面拟合:对应于多个水准点处的高程异常,生成一个最佳的拟合平面,当此平面平行于水平面时,平面拟合等同于固定差改正。
- 曲面拟合:对应于多个水准点处的高程异常,生成一个最佳的拟合抛物面。曲面拟合对起算数据要求比较高,如果拟合程度太差,可能造成工作区域中的高程改正值发散。
- 带状拟合:已知两个水准点,虚拟出一个水准点,变成3个水准点后再进行平面拟合。
求解他们的所需点数如下表所示:
| 高程拟合方法 | 所需点数 |
|---|---|
| 固定改正差 | 1 |
| 平面拟合 | 3 |
| 曲面拟合 | 6 |
| 带状拟合 | 3 |
他们之间的关系可以使用下图展示:

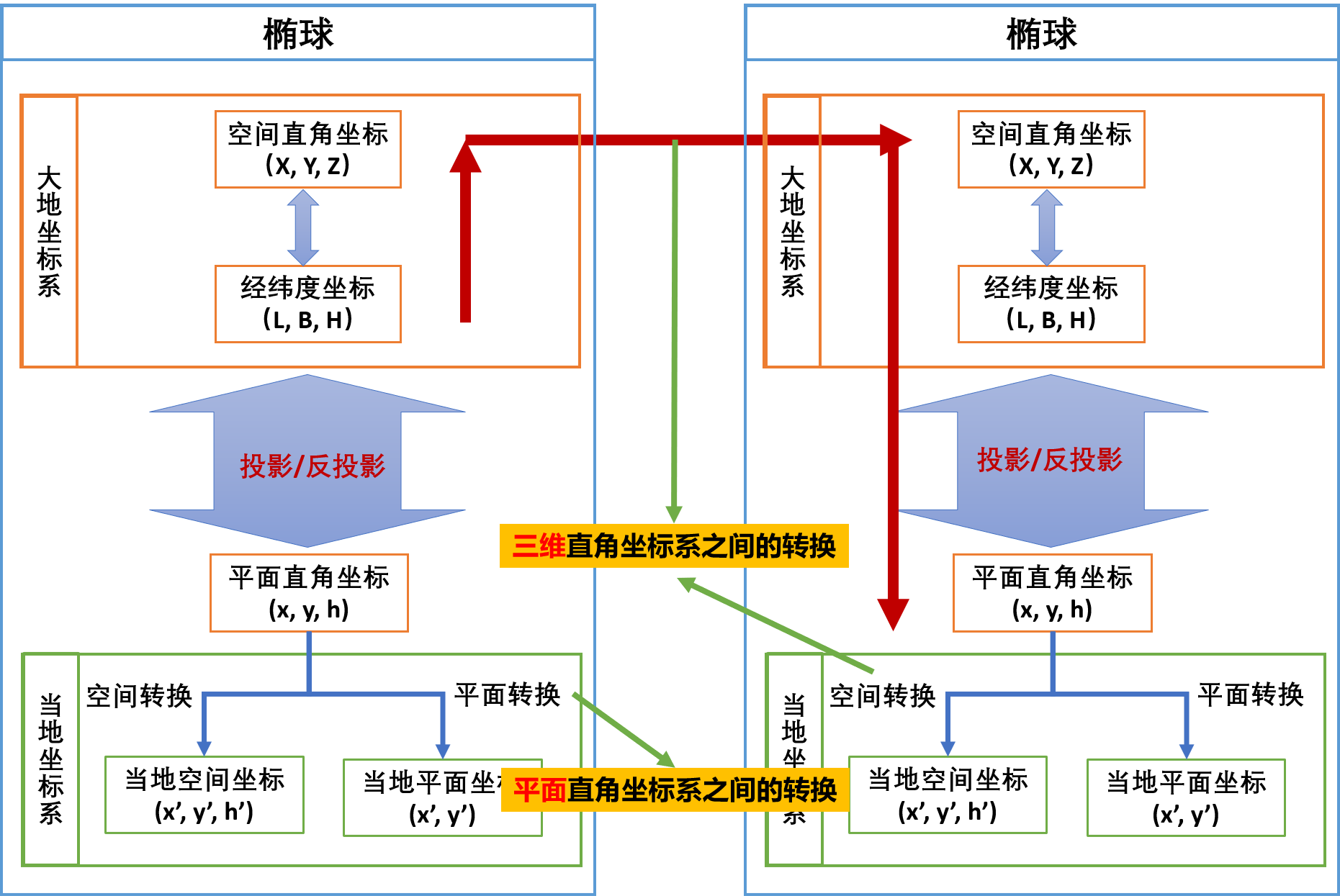
5. 一步法
所谓“一步法”,其实是测量中常见的术语,适合中小区域(一般为10km*10km的范围内)。参数形式和标准七参数一样,还有“两步法”的叫法,与之相应的也有“经典三维”。他们都是在测绘时,手簿的内置坐标转换方法,其本质上是不转换形式下,七参数、四参数、高程拟合的不同组合。
知乎大佬三维地图技术社区对此有过详细解释:坐标转换与参数计算介绍,测绘人必备知识点!现在总结如下,此小节图片来源于这位大佬的文章。
-
“一步法”,忽略源椭球和目标椭球之间的差异,在投影坐标转地方坐标时,使用四参数+高程拟合
-
“两步法”,考虑源椭球和目标椭球之间的差异,在椭球的空间直角坐标系转换时使用7参数,且在投影坐标转地方坐标时,使用四参数+高程拟合

6. 校正参数
校正参数,用于计算两坐标系统之间的平面、高程平移参数。它是在上述方法计算完成后,输入一个已知点,计算校正,调整参数的一个过程。通常在以下两种情况,可以使用校正参数。
- 只有一个BJ-54、国家-80坐标或只有一个和WGS-84坐标系旋转很小的坐标系下的坐标,基准站架设好后,移动站可以直接到一个已知点,当前点的WGS-84坐标,并已知点的当地坐标,计算得出已知坐标和当前坐标的改正量dx、dy、dz,根据此,校验参数。
- 假设已建好一个项目,参数计算完以后,正常工作了一段时间,由于客观原因,第二次作业不想把基准站架设在和第一次同样的位置,此时,可以用到点校正功能,只需要将基准站任意架设,打开第一次使用的项目,到一个已知点上校正坐标即可。校正方法和第一种情况相同。
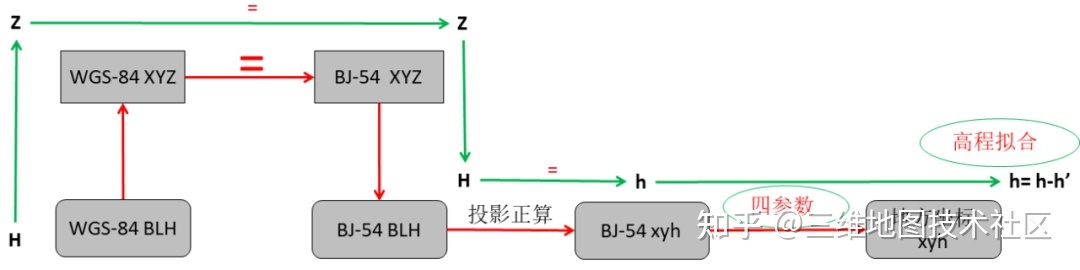
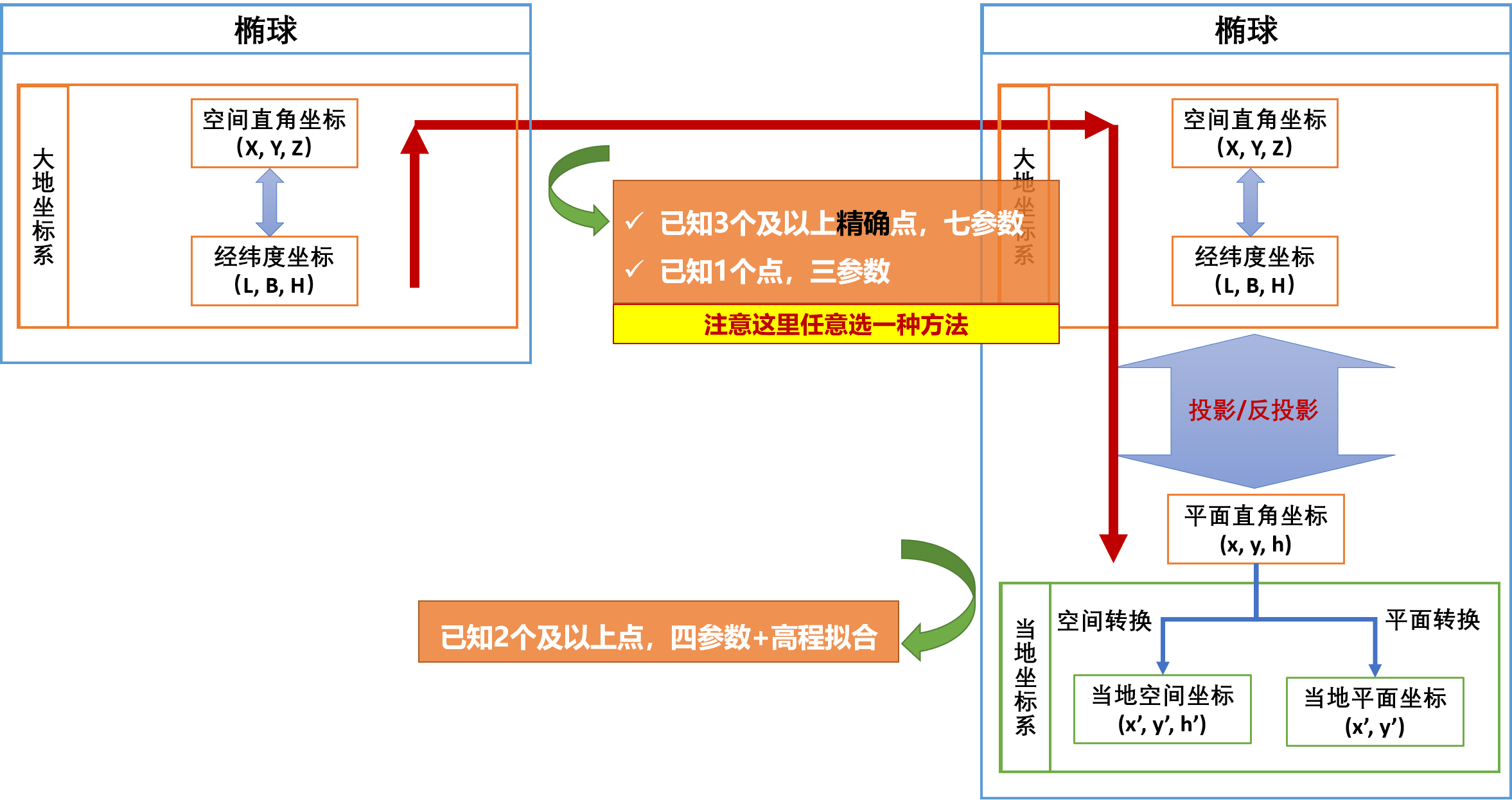
7. 总结
综上所述,关于工程坐标系的转换方法、类别过程可以用如下图示,不同的方法组合成了不同的工程叫法。
误差理论与测量平差基础 ↩︎
-------------------------------------------
个性签名:独学而无友,则孤陋而寡闻。做一个灵魂有趣的人!
如果觉得这篇文章对你有小小的帮助的话,记得在右下角点个“推荐”哦,博主在此感谢!
万水千山总是情,打赏一分行不行,所以如果你心情还比较高兴,也是可以扫码打赏博主,哈哈哈(っ•̀ω•́)っ✎⁾⁾!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号