
【ROS】创建工作空间与功能包
来源: https://www.bilibili.com/video/BV1zt411G7Vn?p=9
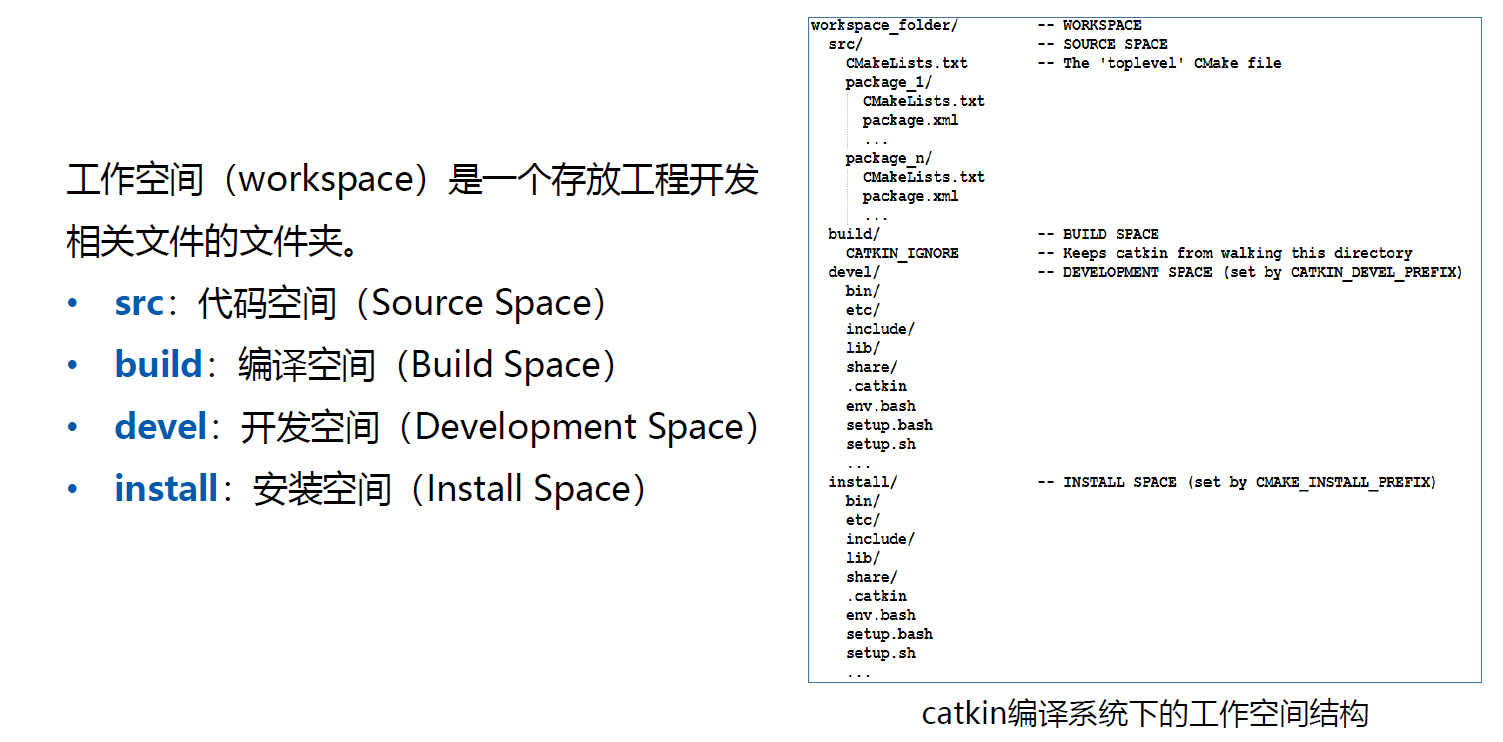
1 创建工作空间
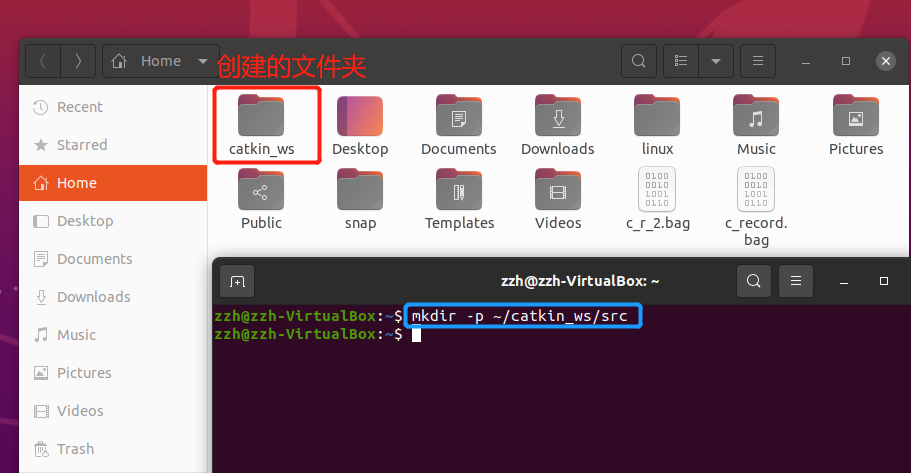
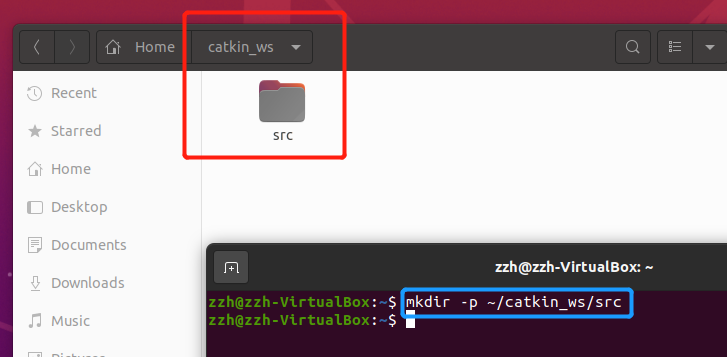
使用命令 $ mkdir -p ~/ catkin_ws/src 创建文件夹,
mkdir -p : 递归创建目录,即使上级目录不存在,会按目录层级自动创建目录
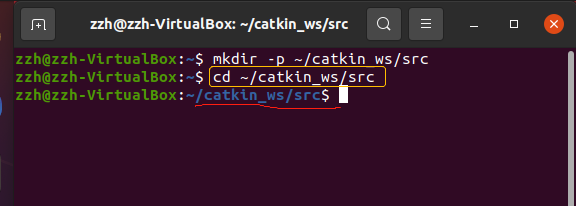
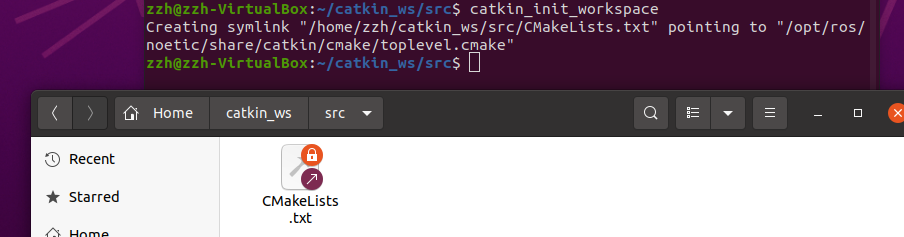
然后用命令: $ cd ~/catkin_ws/src 切换目录
然后用命令: $ catkin_init_workspace 将当前文件夹,初始化为ROS的workspace
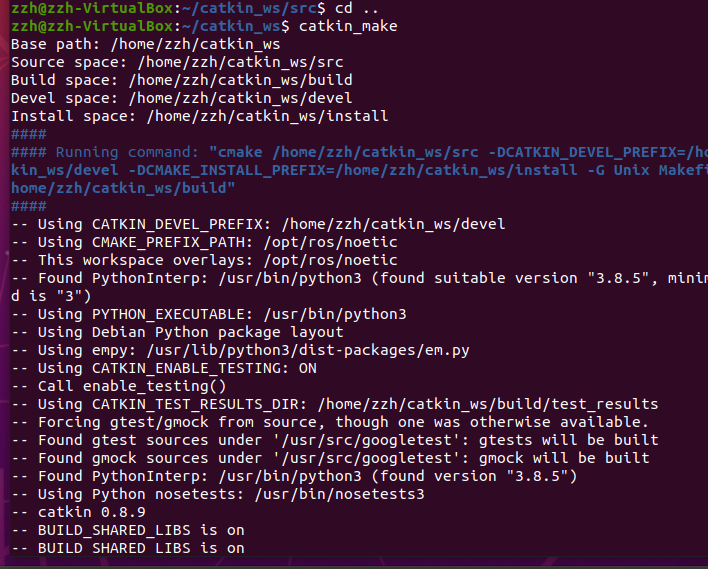
编译工作空间
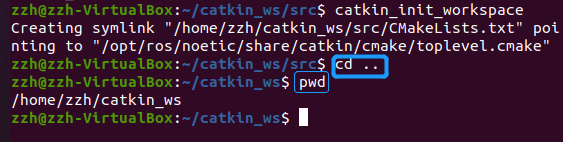
编译前首先要回到工作空间的根目录: /home/zzh/catkin_ws, cd .. 是返回上一层目录, pwd(print work directory) 用于显示工作目录。
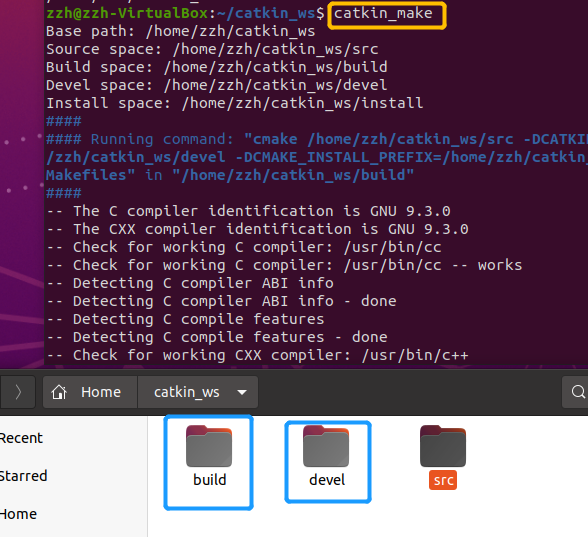
使用编译命令: catkin_make 编译工作空间, 结果会放在devel 和 install文件夹中,编译后产生build 和 devel两个空间,但还未产生install空间,还需另外命令
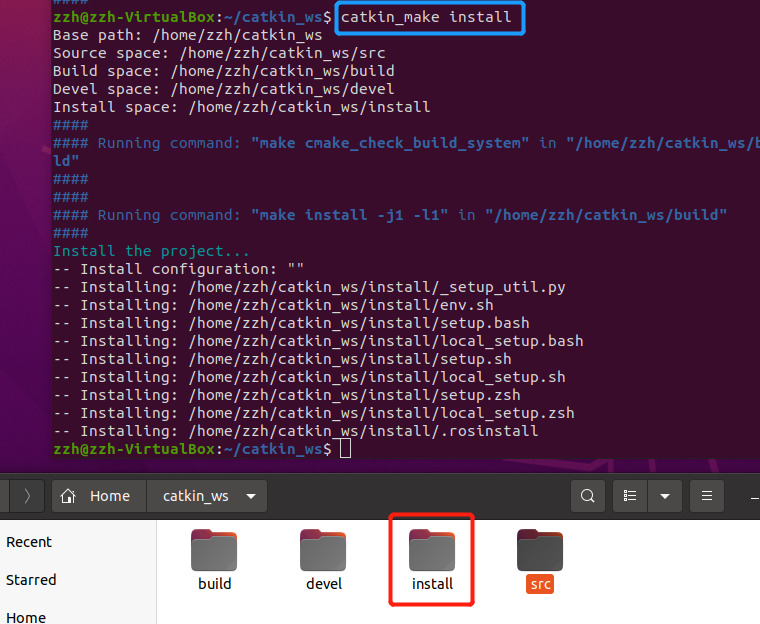
输入命令: catkin_make install 就会产生install安装空间
2 创建功能包
首先切换目录到src文件夹下,在使用命令 catkin_create_pkg 创建功能包,后加功能包名字 功能包的依赖
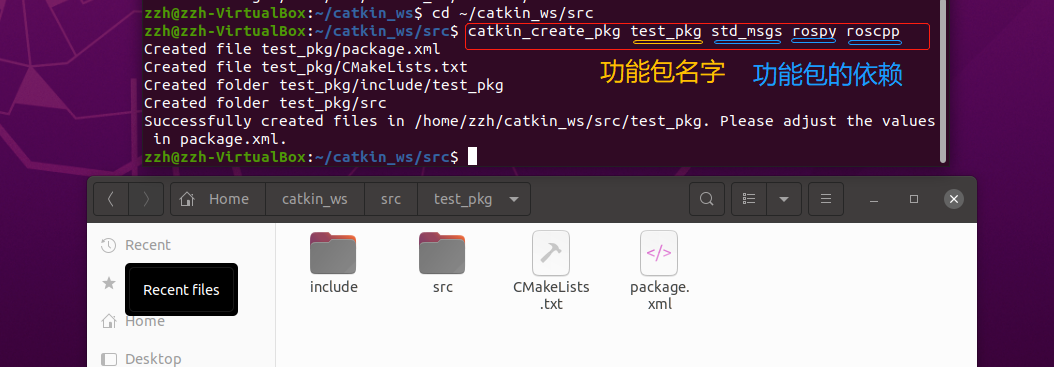
src 用于放置代码,include 用于放置头文件,CMakeLists.txt 和 package.xml 是必备的两个文件,标志这个文件夹为功能包。
编译功能包
切换目录到catkin_ws, 使用命令 catkin_make 编译工作空间,会对功能包编译。
设置环境变量
如果要运行工作空间的代码,需要先设置工作空间的环境变量,输入命令: $ source devel/setup.bash 这样系统才能找到工作空间及对应的功能包。
用echo命令打开环境变量,输入命令: $ echo $ROS_PACKAGE_PATH 查看所有功能包的路径,只有设置$ source devel/setup.bash之后,ROS_PACKAGE_PATH 才会包含你写的工作空间的路径。

