
了解EC11旋转编码器,编写EC11旋转编码器驱动程序。
一、EC11旋转编码器基本认识
(1)、ALPS旋转编码器选型垂直型
(2)、ALPS旋转编码器选型侧装型

(3)、ALPS旋转编码器选型机械尺寸图 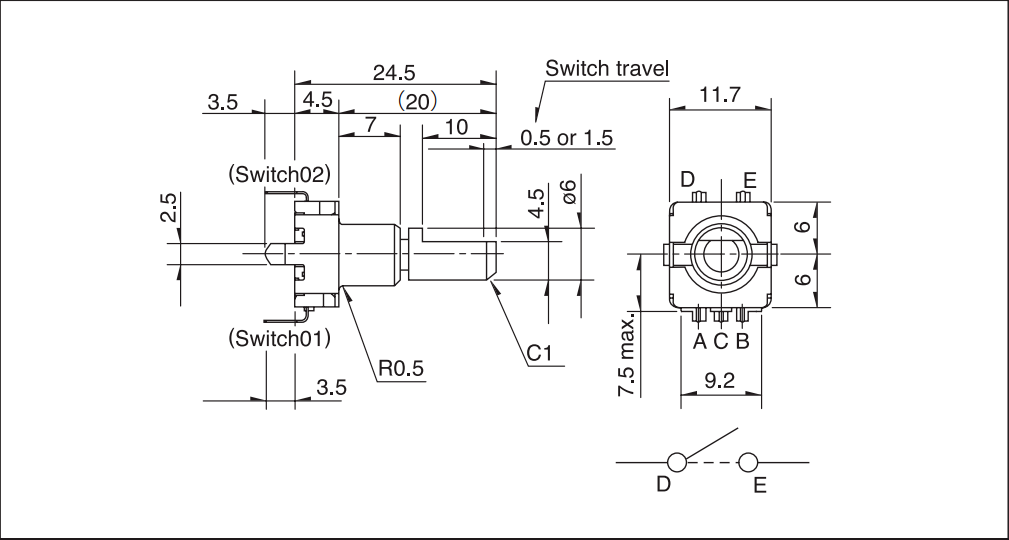
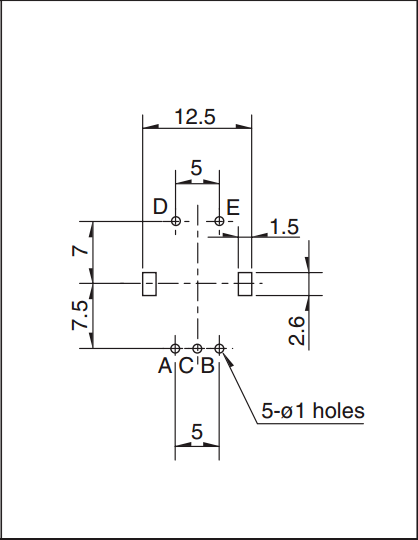
(4)、ALPS旋转编码器选型引脚图
(5)、ALPS旋转编码器选型内部触点开关结构图
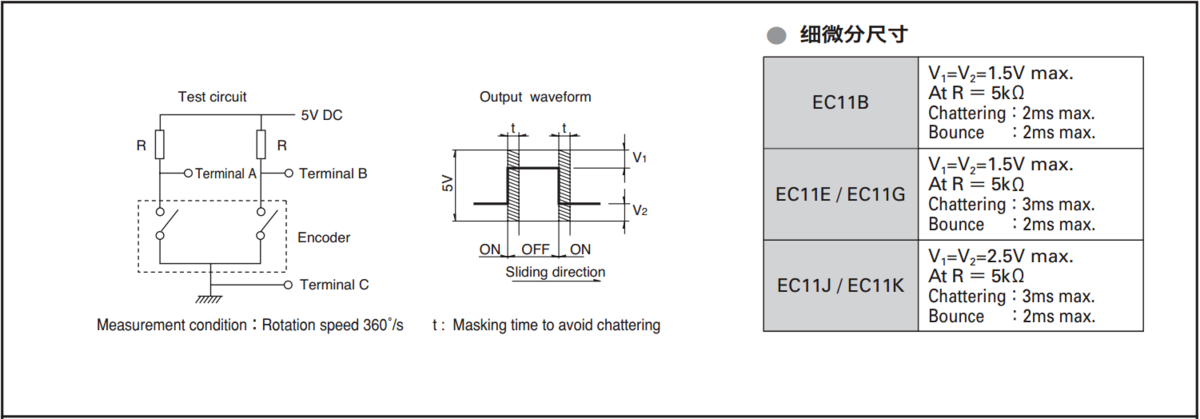
(6)、ALPS旋转编码器选型时序图 
(7)、EC11旋转编码器测试电路原理图接法
1、接外部上拉电阻,适用于浮空输入和输入上拉模式的IO口,如下图所示。

2、无外部上拉电阻,几乎所有单片机IO口都可以设置为输入上拉模式的IO口,如下图所示。

二、EC11旋转编码器初级认识
(1)、EC11旋转编码器按旋转出动作
EC11旋转编码器按旋转的输出动作分为2种,一种就是转一格,A、B对C端输出一个完整脉冲,简称一定位一脉冲;另一种是转两格,A、B对C端输出一个完整脉冲(转一格就只是由低电平---高电平或由高电平---低电平),简称两定位一脉冲。
(2)、EC11旋转编码器按旋转出动作:一定位一脉冲
1、一定位一脉冲EC11旋转编码器转动一格输出波形图
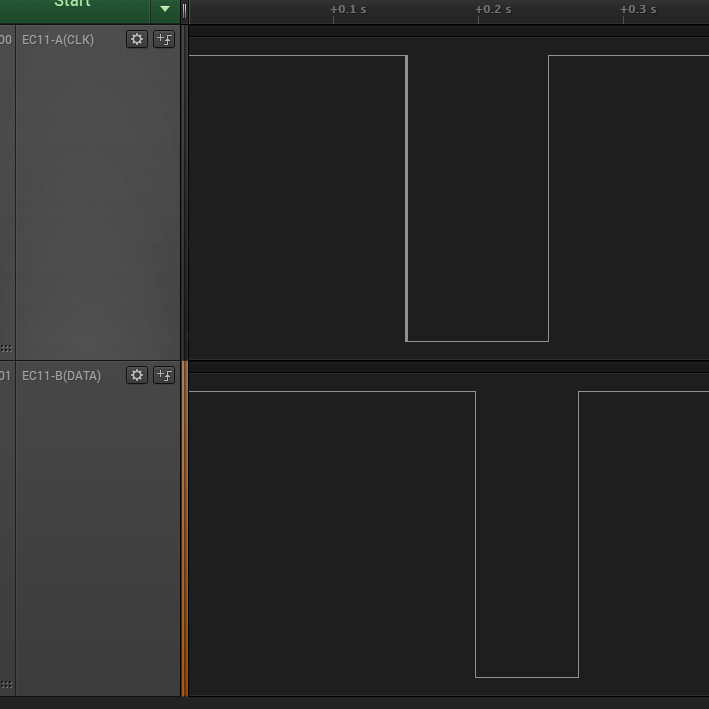
解释上图:一定位一脉冲的EC11旋转编码器按测试电路图的接法,在静止的时候A、B两线输出都是高电平。转动一格,A、B两线各自输出一个低电平脉冲,然后又回到高电平状态,对应于EC11旋转编码器内部A、B两个触点开关的动作为:断开---闭合---断开。
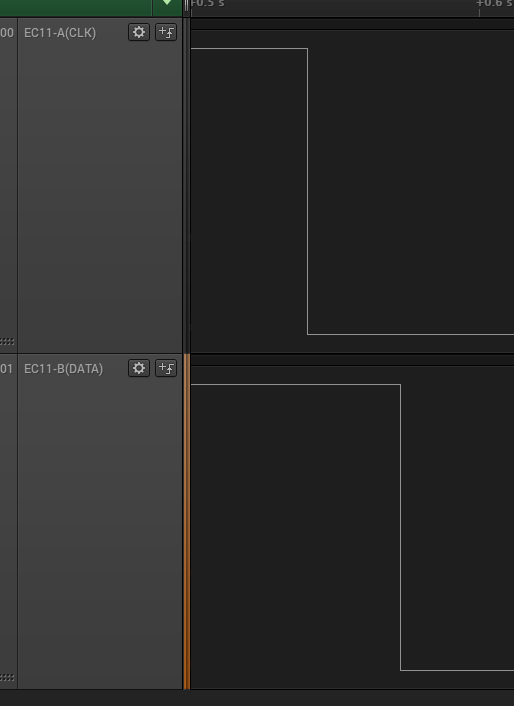
2、两定位一脉冲EC11旋转编码器转动一格输出上升沿波形图
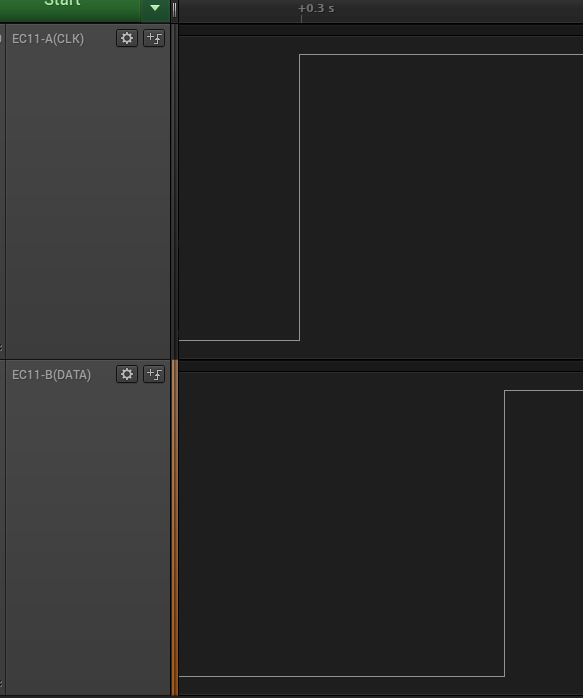
解释上两图:两定位一脉冲的EC11旋转编码器稍微复杂一些,转动一格只会输出半个脉冲。静止时,A、B触点开关可以是断开的也可以是闭合的。若初始状态时A、B都是高电平,转动一格就输出从高电平到低电平的下降沿,随后一直输出低电平,对应于EC11旋转编码器内部A、B两个触电开关的动作为断开---闭合。若初始状态时A、B都是低电平,转动一格就输出从低电平到高电平的上升沿,随后一直输出低电平,对应于EC11旋转编码器内部AB两个触点开关的动作为闭合---断开。由于两定位一脉冲的EC11旋转编码器会有两种初始状态,写驱动程序就需要考虑多一些情况。再者,这类EC11旋转编码器在转动到内部A、B触点一直闭合的时候,就相当于把上拉电阻的另一端接地,无形中加大了系统的功耗(若外接10K上拉电阻到5V电源就是500uA的电流),这对于低功耗应用来说是非常不利的。
(2)、EC11旋转编码器一定位一脉冲波形图
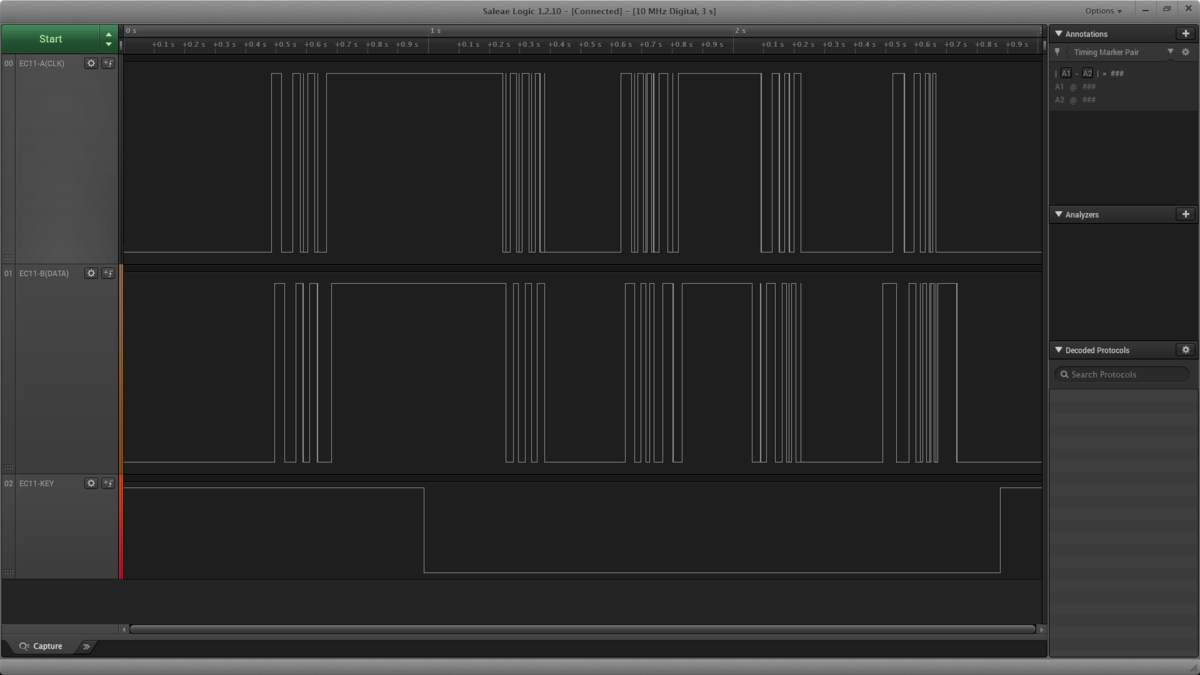
1、EC11旋转编码器正转一定位一脉冲波形图
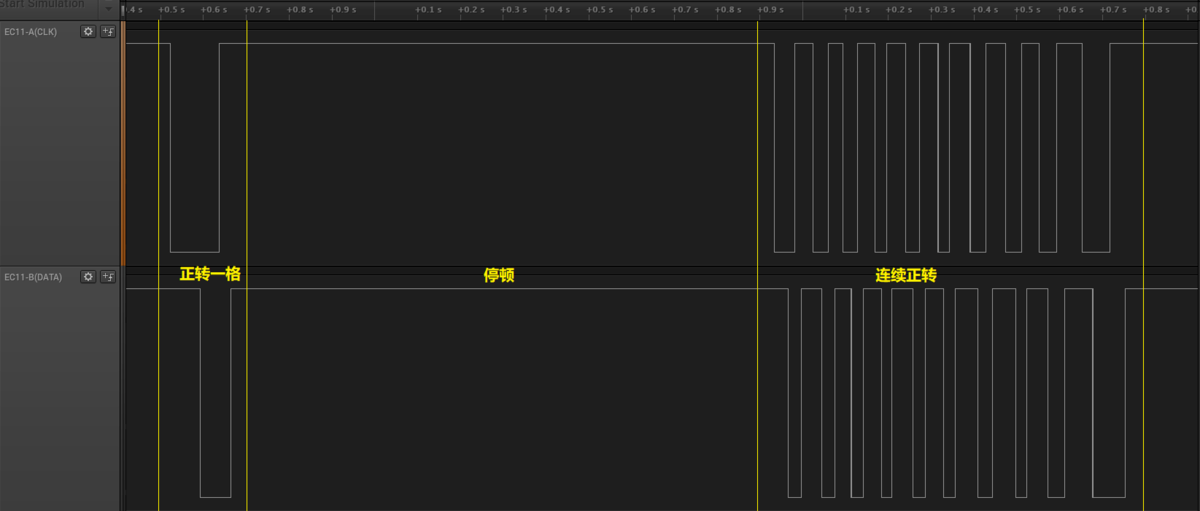
解释上图:旋转EC11旋转编码器操作顺序为:正转一格---停顿---连续正转---停
2、EC11旋转编码器反转一定位一脉冲波形图