
PointASNL: Robust Point Clouds Processing using Nonlocal Neural Networks with Adaptive Sampling
来源:2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)
Abstract
- 由传感器或重建算法获取原始点云包含异常值和噪声
PointASNL有效的处理带有噪声的点云- 方案的关键是自适应采样算法
(adaptive sampling) - AS模块有利于点云的特征学习,而且可以缓解异常值的偏差效应。
- 为了进一步的捕获采样点的邻域和长距离的依赖关系,受到
nolocal的启发,我们提出了一个local-nonlocal的关系模块。 LNL模块使学习对噪声不敏感
算法流程:
- 首先对FPS的初始采样点周围的邻居进行加权,然后自适应调整采样点的权重
introduction
- PointASNL由两部分组成:adaptive sampling module和local-nonlocal module
adaptive sampling module:调整采样点的坐标和特征local-nonlocal module:捕获采样点的邻域和长距离依赖,使学习过程对噪声不敏感。
当前的大多数方法通常使用采样方法从原始点云中选择点来进行局部特征学习。在这些采样算法中,farthest point sampling,Poisson disk sampling,Gumbel subset sampling是在以前的工作中提出的。- 一个关键的问题是,上述的采样方法采样的点受限于原始点云的子集,因此一些采样算法例如
FPS会采样到其中的噪声点从而对下游任务造成不利的影响。
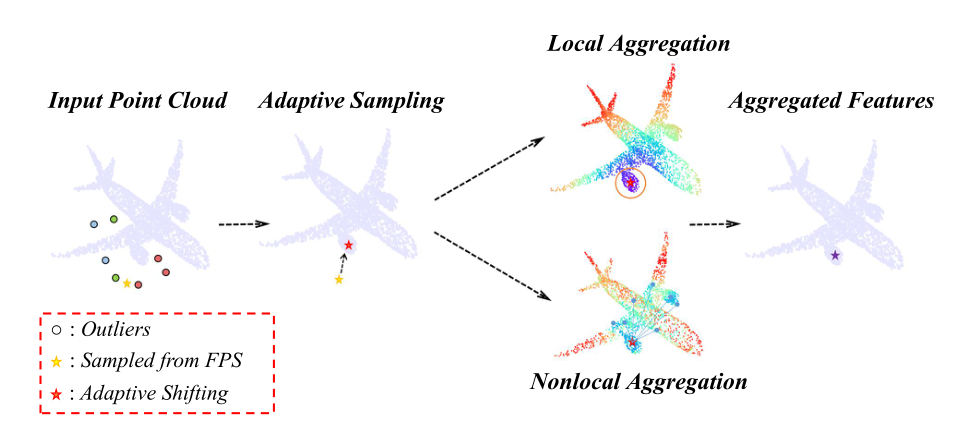
目前的特征学习方法大多是,根据采样点构建图或者定义卷积式进行运算的。然而\(\color{red}{这种做法只考虑了相邻区域的局部信息交互,然后通过层侧结构的网络获取全局上下文。}\)这导致了自底向上的的学习方式,受到非局部神经网络的启发此处提出了L-NL的模块,其中的关键组件是Point NonLocal Cell。point nolocal cell可以计算整个点云的采样点的加权和,而不是仅限于邻域的范围。通过学习长依赖的相关性,L-NL可以为文件的点云处理提供更加精确的信息。如图右示,虽然下面发动机被噪声点覆盖,但是L-NL依然可以从其它有着不同噪音分布的引擎上学习到此处引擎的特征。
贡献:
- 提出了一种端到端的稳健处理点云的流程。PointANSL可以有效的环节离群值或噪声的影响。
- 利用提出的自适应采样模块,PointANSL可以自适应调整初始采样点的坐标,使其更符合几何特征的学习并且针对离群噪声更加鲁棒。
- 提出的
L-NL模块,可以提高特征在local内学习的程度
Related Work
原始获取到的数据一般都会存在离群值和噪声,以前的工作是用于

 浙公网安备 33010602011771号
浙公网安备 33010602011771号