


智能小车之红外循迹以及红外避障模块电路设计
红外寻迹模块
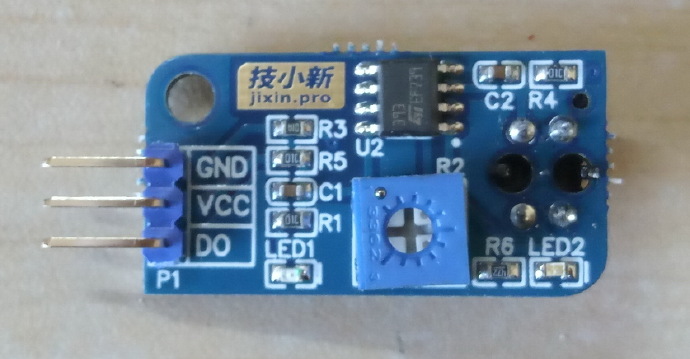
红外避障模块
一。原理图
红外寻迹模块
红外避障模块
红外发射管,红外接收管
比较器LM393输出低电平时,绿色指示灯亮,输出高电平时绿色指示灯灭。
当3脚的电压大于2脚电压时输出高电平。
3脚的电压小于2脚电压输出低电平。电位器用来调整反向输入端的电压。
原理图基本相同。
二。红外避障模块
发射管一直在发射红外光,当前面的障碍物越近,反射回来的红外光越强,红外接收管的EC电压越接近0V,那么就会小于LM393的2脚的电压,LM393输出低电平,绿色指示灯亮。
在实际使用中红外接收管工作在放大区,也就是说C点的电压在不断的变化。所以我们调节LM393的2脚的电压来改变灵敏度。
三。寻迹模块
利用对不同颜色的障碍物对红外光的反射能力不同。白颜色对红外光的反射能力最强,黑色对红外光的反射能力最弱。
当寻迹模块在黒线上的时候蓝色指示灯灭,当寻迹模块不在黒线上的时候蓝色指示灯亮。
如何判断寻迹模块是偏左还是偏右呢?
就需要3个这样的模块,当偏离到黒线的左边时,左边的模块和中间的模块蓝色指示灯亮,右边的指示灯灭。
同理,当偏离到黑线右边时,右边和中间的模块蓝色指示灯亮,左边的指示灯灭。
调节电位器可以调节灵敏度。
越靠近桌面,3脚的电压越低,越远离桌面,3脚的电压越高。
结尾给大家分享些资料便于后期学习参考
基于STM32-WiFi智能小车机器人开发实战
http://www.makeru.com.cn/course/details/3008?s=45051
智能小车设计
http://www.makeru.com.cn/live/3905_1418.html?s=45051
(stm32串口应用)
http://www.makeru.com.cn/live/1392_1164.html?s=45051
PADS-PCB原图绘制
http://www.makeru.com.cn/live/4006_1430.html?s=45051
老司机倾囊相授-PCB大牛修炼秘籍
http://www.makeru.com.cn/live/3472_1296.html?s=45051

