stm32学习之基本定时器--TIM
stm32f1系列,有基本定时器、通用定时器、高级定时器三类TIM定时器。其中,TIM6/7是本文要讲的基本定时器。
基本定时器TIM6/7是16位的只能向上计数的定时器,只能用于定时。而通用定时器和高级定时器有更多的功能,如还可以进行输出比较、输入捕捉等功能,相关的介绍会写在后面的文章,这里只讲基本定时器。
先看看基本定时器的框图,如图24-1。
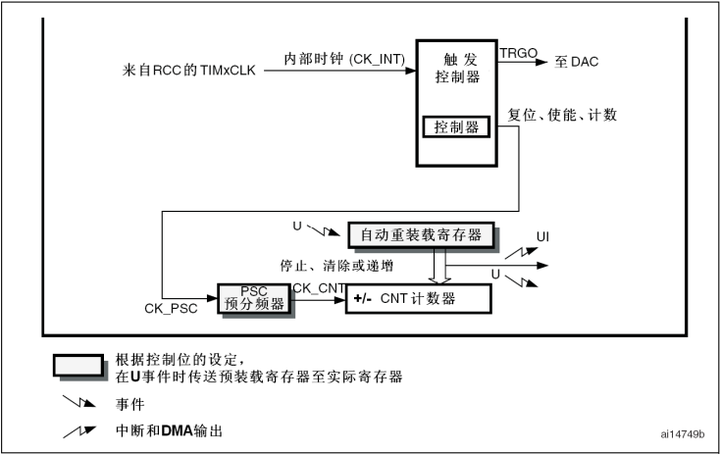
图24-1
时钟源
我们查阅参考手册RCC章节的时钟树可以知道,RCC的定时器时钟TIMxCLK,即内部时钟CK_INT是由APB1预分频器分频后提供。如图24-2所示,如果APB1预分频系数为1,,则频率不变,否则频率为2倍。即此时用于分频的APB1的预分频系数为2,所以TIMxCLK = 36 * 2 = 72MHz。
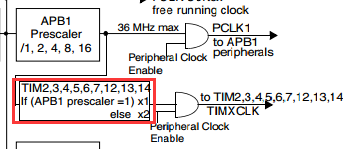
图24-2
计数器时钟
如图24-1的框图,计数器时钟由内部时钟CK_INT提供,经过PSC预分频器后得到CK_CNT。PSC是一个16位的预分频器,可以对定时器时钟TIMxCLK进行1~65536之间的任何一个数进行分频。分频后的CK_CNT值的计算在参考手册TIMx_PSC寄存器描述里有提到,如图24-3。
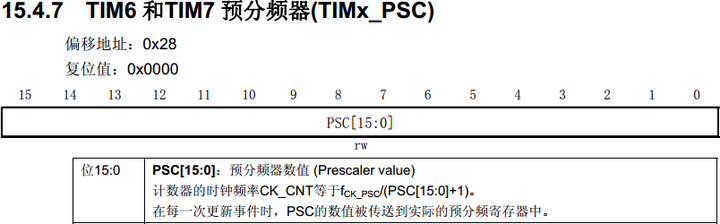
图24-3
即CK_CNT = CK_PSC/(PSC[15:0]+1)。
计数器
计数器CNT是一个16位的计数器,只能往上计数,最大计数值为65535。
自动重装载寄存器TIMx_ARR
TIMx_ARR寄存器里存着最大的计数值,当计数到该值时,会产生中断。当然了你得使能了中断才可以。
定时时间计算
计一个数的时间是1/CK_CNT,产生一次中断的时间为(ARR+1)/CK_CNT。如果在中断服务程序里设置一个变量time用于记录中断次数,则定时时间为:(ARR+1)/CK_CNT*time。
TIM_TimeBaseInitTypeDef
如图24-4为基本定时器TIM_TimeBaseInitTypeDef结构体定义。
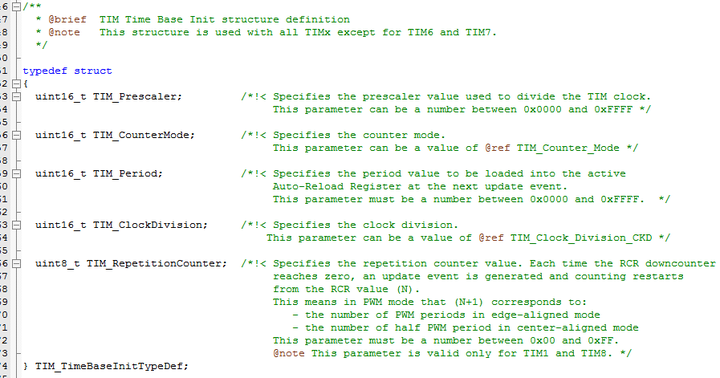
图24-4
TIM_Prescaler:指定定时器预分频器数值,由TIMx_PSC寄存器配置,可设置范围为0x0000~0xFFFF,即0~65535;
TIM_CounterMode:计数模式,可分为向上计数、向下计数以及三种中心对齐模式。而基本定时器只能向上计数;
TIM_Period:计数器周期,即自动重装载寄存器TIMx_ARR的值,在事件生成时更新到影子寄存器,由TIMx_CR1寄存器的ARPE位配置是否使能缓冲;
TIM_ClockDivision:时钟分频,配置定时器时钟CK_INT频率与数字滤波器采样时钟频率分频比,基本定时器没有这个功能,不用设置;
TIM_RepetitionCounter:重复计数器,属于高级控制寄存器专用寄存器位,利用它可以很容易控制输出PWM个数,这里不用设置。
定时1s实验
例如,需要做一个1s的定时,CK_PSC=72MHz,则PSC=71,那么CK_CNT=1MHz,
计一个数时间:1/CK_CNT = 1/1MHz = 1us,
中断一次的时间:(ARR+1)/CK_CNT = (999+1)/1MHz = 1ms,
则定时时间:(ARR+1)/CK_CNT*time = 1ms*1000 = 1s
我们用led的亮灭状态变化来展示1s的定时。
初始化TIM_TimeBaseInitTypeDef
前文提到的TIM_TimeBaseInitTypeDef结构体有5个成员,但基本定时器TIM6/7只用到了TIM_Prescaler和TIM_Period这两个成员,其他三个是通用定时器和高级定时器才会用到的。
/** * @brief 基本定时器配置 * @param 无 * @retval 无 */ static void BASIC_TIM_Mode_Config(void) { TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM6, ENABLE); // 内部时钟72MHz TIM_TimeBaseStructure.TIM_Period = 999; // 自动重装载寄存器的值 TIM_TimeBaseStructure.TIM_Prescaler= 71; // 预分频器数值 TIM_TimeBaseInit(TIM6, &TIM_TimeBaseStructure); TIM_ClearFlag(TIM6, TIM_FLAG_Update); // 清除计数器中断标志位 TIM_ITConfig(TIM6, TIM_IT_Update, ENABLE); TIM_Cmd(TIM6, ENABLE); }
中断优先级配置
有关中断配置相关已经在之前的文章介绍过,有不清楚的地方可移步阅读。这里只说几个配置的关键点。可配置中断优先级分组为0,即0位抢占优先级,4位子优先级。配置中断源为TIM6_IRQn。
/** * @brief 中断优先级配置 * @param 无 * @retval 无 */ static void BASIC_TIM_NVIC_Config(void) { NVIC_InitTypeDef NVIC_InitStructure; NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0); NVIC_InitStructure.NVIC_IRQChannel = TIM6_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_Init(&NVIC_InitStructure); }
中断函数
中断函数在stm32f10x_it.c文件里配置。
extern volatile uint32_t time; // 该变量定义在main()函数里 void TIM6_IRQHandler(void) { if(TIM_GetITStatus(TIM6, TIM_IT_Update) != RESET) { time++; // 每中断一次,time值加1,中断一次时间为1ms,需要中断1000次才可定时1s,即time值为1000 TIM_ClearITPendingBit(TIM6, TIM_FLAG_Update); } }
最后在main()函数里调用led和定时器的初始化配置函数,在一个循环里判断time变量的值是否为1000,如果已经达到1000,则led灯状态变化(亮或灭)一次,并且time变量值重赋为0,以便继续判断及定时。
最后给大家分享些smt32方面的资料便于学习参考
(STM32中断系统)
http://www.makeru.com.cn/live/1392_1124.html?s=45051
(定时器)
http://www.makeru.com.cn/live/1392_1199.html?s=45051
基于STM32-WiFi智能小车机器人开发实战
http://www.makeru.com.cn/course/details/3008?s=45051

 浙公网安备 33010602011771号
浙公网安备 33010602011771号