JVM学习笔记(六):锁优化与CAS
1 来源
- 来源:《Java虚拟机 JVM故障诊断与性能优化》——葛一鸣
- 章节:第八章
本文是第八章的一些笔记整理。
2 概述
本文主要讲述了JVM在运行层面和代码层面的锁优化策略,最后介绍了实现无锁的其中一种方法CAS。
3 对象头
JVM中每个对象都有一个对象头,用于保存对象的系统信息,64bit JVM的对象头结构如下图所示:
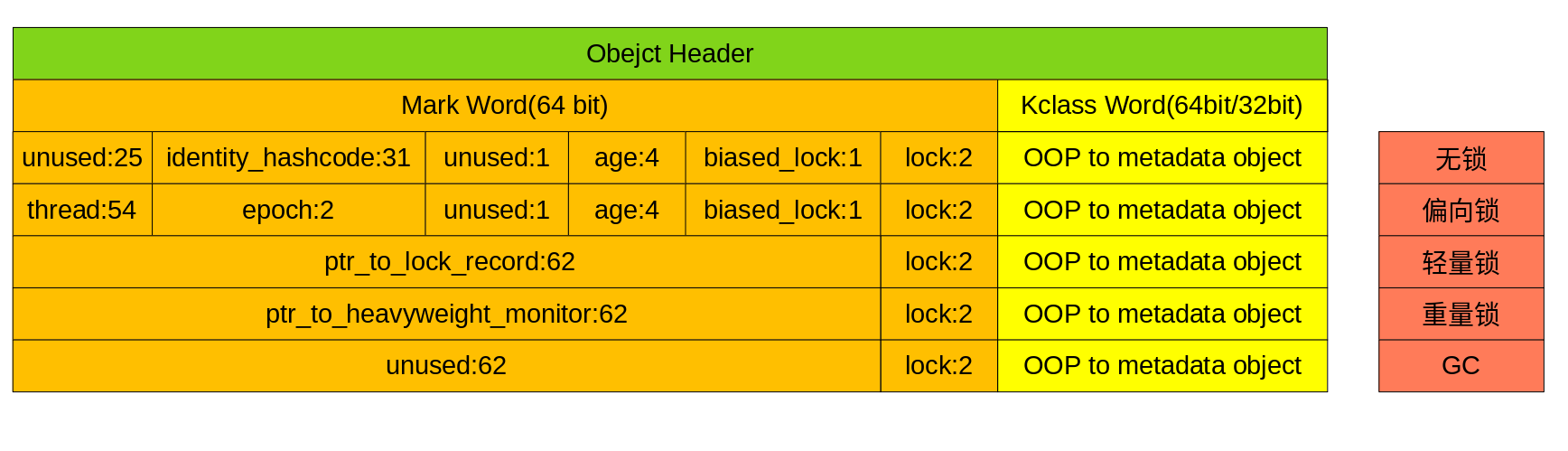
其中:
Mark Word由64bit组成,一个功能数据区,可以存放对象的哈希、对象年龄、锁的指针等信息KClass Word在没有开启指针压缩的情况下,64bit组成,但是64bit JVM会默认开启指针压缩(+UseCompressedOops),所以会压缩到32bit
另外,从图中可以看到,不同的锁对应于不同的Mark Word:
- 无锁:
25bit空+31bit哈希值+1bit空+4bit分代年龄+1bit是否偏向锁+2bit锁标记 - 偏向锁:
54bit持有偏向锁的线程ID+2bit偏向时间戳+1bit空+4bit分代年龄+1bit是否偏向锁+2bit锁标记 - 轻量锁:
62bit栈中锁记录指针+2bit锁标记 - 重量锁:
62bit重量级锁指针+2bit锁标记
JVM如何区分锁主要看两个字段:biased_lock与lock,对应关系如下:
biased_lock=0 lock=00:轻量级锁biased_lock=0 lock=01:无锁biased_lock=0 lock=10:重量级锁biased_lock=0 lock=11:GC标记biased_lock=1 lock=01:偏向锁
4 锁的运行时优化
很多时候JVM都会对线程竞争的操作在JVM层面进行优化,尽可能解决竞争问题,也会试图消除不必要的竞争,实现的方法包括:
- 偏向锁
- 轻量级锁
- 重量级锁
- 自旋锁
- 锁消除
4.1 偏向锁(JDK15默认关闭)
4.1.1 简介
偏向锁是JDK 1.6提出的一种锁优化方式,核心思想是,如果线程没有竞争,则取消已经取得锁的线程同步操作,也就是说,某个线程获取到锁后,锁就会进入偏向模式,当线程再次请求该锁时,无需再次进行相关的同步操作,从而节省操作时间。而在此期间如果有其他线程进行了锁请求,则锁退出偏向模式。
开启偏向锁的参数是-XX:+UseBiasedLocking,处于偏向锁时,Mark Word会记录获得锁的线程(54bit),通过该信息可以判断当前线程是否持有偏向锁。
注意JDK15后默认关闭了偏向锁以及禁用了相关选项,可以参考JDK-8231264。
4.1.2 加锁流程
偏向锁的加锁过程如下:
- 第一步:访问
Mark Word中的biased_lock是否设置为1,lock是否设置为01,确认为可偏向状态,如果biased_lock为0,则是无锁状态,直接通过CAS操作竞争锁,如果失败,执行第四步 - 第二步:如果为可偏向状态,测试线程
ID是否指向当前线程,如果是,到达第五步,否则到达第三步 - 第三步:如果线程
ID没有指向当前线程,通过CAS操作竞争锁,如果成功,将Mark Word中的线程ID设置为当前线程ID,然后执行第五步,如果失败,执行第四步 - 第四步:如果
CAS获取偏向锁失败,表示有竞争,开始锁撤销 - 第五步:执行同步代码
4.1.3 例子
下面是一个简单的例子:
public class Main {
private static List<Integer> list = new Vector<>();
public static void main(String[] args){
long start = System.nanoTime();
for (int i = 0; i < 1_0000_0000; i++) {
list.add(i);
}
long end = System.nanoTime();
System.out.println(end-start);
}
}
Vector的add是一个synchronized方法,使用如下参数测试:
-XX:BiasedLockingStartupDelay=0 # 偏向锁启动时间,设置为0表示立即启动
-XX:+UseBiasedLocking # 开启偏向锁
输出如下:
1664109780
而将偏向锁关闭:
-XX:BiasedLockingStartupDelay=0
-XX:-UseBiasedLocking
输出如下:
2505048191
可以看到偏向锁还是对系统性能有一定帮助的,但是需要注意偏向锁在锁竞争激烈的场合没有太强的优化效果,因为大量的竞争会导致持有锁的线程不停地切换,锁很难一直保持在偏向模式,这样不仅仅不能优化性能,反而因为频繁切换而导致性能下降,因此竞争激烈的场合可以尝试使用-XX:-UseBiasedLocking禁用偏向锁。
4.2 轻量级锁
4.2.1 简介
如果偏向锁失败,那么JVM会让线程申请轻量级锁。轻量级锁在内部使用一个BasicObjectLock的对象实现,该对象内部由:
- 一个
BasicLock对象 - 一个持有该锁的
Java对象指针
组成。BasicObjectLock对象放置在Java栈的栈帧中,在BasicLock对象还会维护一个叫displaced_header的字段,用于备份对象头部的Mark Word。
4.2.2 加锁流程
- 第一步:通过
Mark Word判断是否无锁(biased_lock是否为0且lock为01),如果是无锁,会创建一个叫锁记录(Lock Record)的空间,用于存储当前Mark Word的拷贝 - 第二步:将对象头的
Mark Word复制到锁记录中 - 第三步:拷贝成功后,使用
CAS操作尝试将锁对象Mark Word更新为指向锁记录的指针,并将线程栈帧中的锁记录的owner指向Object的Mark Word - 第四步:如果操作成功,那么就成功拥有了锁
- 第五步:如果操作失败,
JVM会检查Mark Word是否指向当前线程的栈帧,如果是就说明当前线程已经拥有了这个对象的锁,就可以直接进入同步块继续执行,否则会让当前线程尝试自旋获取锁,自旋到达一定次数后如果还没有获得锁,那么会膨胀为重量级锁
4.3 重量级锁
4.3.1 简介
当轻量级锁自旋一定次数后还是无法获取锁,就会膨胀为重量级锁。相比起轻量级锁,Mak Word存放的是指向锁记录的指针,重量级锁中的Mark Word存放的是指向Object Monitor的指针,如下图所示:
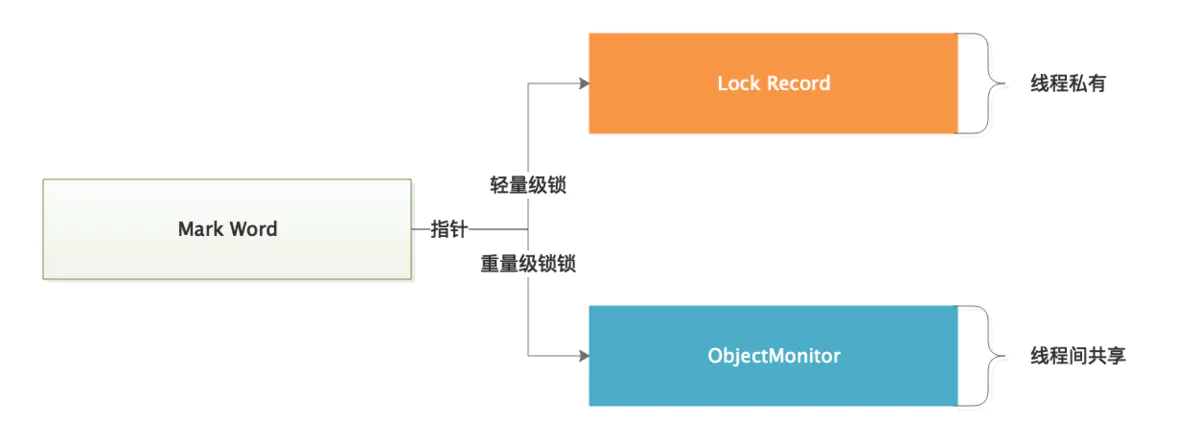
(图源见文末)
因为锁记录是线程私有的,不能满足多线程都能访问的需求,因此重量级锁中引入了能线程共享的ObjectMonitor。
4.3.2 加锁流程
初次尝试加锁时,会先CAS尝试修改ObjectMonitor的_owner字段,结果如下:
- 第一种:锁没有其他线程占用,成功获取锁
- 第二种:锁被其他线程占用,则当前线程重入锁,获取成功
- 第三种:锁被锁记录占用,而锁记录是线程私有的,也就是属于当前线程的,这样就属于重入,重入次数为1
- 第四种:都不满足,再次尝试加锁(调用
EnterI())
而再次尝试加锁的过程,是一个循环,不断尝试获取锁直到成功为止,流程简述如下:
- 多次尝试获取锁
- 获取失败把线程包装后放进阻塞队列
- 再次尝试获取锁
- 失败后将自己挂起
- 被唤醒后继续尝试获取锁
- 成功则退出循环,否则继续
4.4 自旋锁
自旋锁可以使线程没有取得锁时不被挂起,而是去执行一个空循环(也就是所谓的自旋),在若干个空循环后如果可以获取锁,则继续执行,如果不能,挂起当前线程。
使用自旋锁后,线程被挂起的概率相对减小,线程执行的连贯性相对加强,因此对于锁竞争不是很激烈、锁占用并发时间很短的并发线程具有一定的积极意义,但是,对于竞争激烈且锁占用时间长的并发线程,自旋等待后仍无法获取锁,还是会被挂起,浪费了自旋时间。
在JDK1.6中提供了-XX:+UseSpinning参数开启自旋锁,但是JDK1.7后,自旋锁参数被取消,JVM不再支持由用户配置自旋锁,自旋锁总是被执行,次数由JVM调整。
4.5 锁消除
4.5.1 简介
锁消除就是把不必要的锁给去掉,比如,在一些单线程环境下使用一些线程安全的类,比如StringBuffer,这样就可以基于逃逸分析技术可消除这些不必要的锁,从而提高性能。
4.5.2 例子
public class Main {
private static final int CIRCLE = 200_0000;
public static void main(String[] args){
long start = System.nanoTime();
for (int i = 0; i < CIRCLE; i++) {
createStringBuffer("Test",String.valueOf(i));
}
long end = System.nanoTime();
System.out.println(end-start);
}
private static String createStringBuffer(String s1,String s2){
StringBuffer sb = new StringBuffer();
sb.append(s1);
sb.append(s2);
return sb.toString();
}
}
参数:
-XX:+DoEscapeAnalysis
-XX:-EliminateLocks
-Xcomp
-XX:-BackgroundCompilation
-XX:BiasedLockingStartupDelay=0
输出:
260642198
而开启锁消除后:
-XX:+DoEscapeAnalysis
-XX:+EliminateLocks
-Xcomp
-XX:-BackgroundCompilation
-XX:BiasedLockingStartupDelay=0
输出如下:
253101105
可以看到还是有一定性能提升的,但是提升不大。
5 锁的应用层优化
锁的应用层优化就是在代码层面对锁进行优化,方法包括:
- 减少持有时间
- 减小粒度
- 锁分离
- 锁粗化
5.1 减少持有时间
减少锁持有时间就是尽可能减少某个锁的占用时间,以减少线程互斥时间,比如:
public synchronized void method(){
A();
B();
C();
}
如果只有B()是同步操作,那么可以优化为在必要时进行同步,也就是在执行B()的时候进行同步操作:
public void method(){
A();
synchronized(this){
B();
}
C();
}
5.2 减小粒度
所谓的减小锁粒度,就是指缩小锁定的对象范围,从而减小锁冲突的可能性,进而提高系统的并发能力。
减小粒度也是一种削弱多线程竞争的有效手段,比如典型的就是ConcurrentHashMap,在JDK1.7中的segment就是一个很好的例子。每次并发操作的时候只加锁某个特定的segment,从而提高并发性能。
5.3 锁分离
锁分离就是将一个独占锁分成多个锁,比如LinkedBlockingQueue。在take()和put()操作中,使用的并不是同一个锁,而是分离成了一个takeLock和一个putLock:
private final ReentrantLock takeLock;
private final ReentrantLock putLock;
初始化操作如下:
this.takeLock = new ReentrantLock();
this.notEmpty = this.takeLock.newCondition();
this.putLock = new ReentrantLock();
而take()和put()操作如下:
public E take() throws InterruptedException {
takeLock.lockInterruptibly(); //不能两个线程同时take
//...
try {
//...
} finally {
takeLock.unlock();
}
//...
}
public void put(E e) throws InterruptedException {
//...
putLock.lockInterruptibly(); //不能两个线程同时put
try {
//...
} finally {
putLock.unlock();
}
//...
}
可以看到通过putLock以及takeLock两把锁实现了真正的取数据与写数据分离
5.4 锁粗化
通常情况下,为了保证多线程的有效并发,会要求每个线程持有锁的时间尽可能短,但是,如果对同一个锁不停请求,本身也会消耗资源,反而不利于性能优化,于是,在遇到一连串连续对同一个锁不断进行请求和释放的操作时,会把所有的锁操作整合成对锁的一次请求,减少对锁的请求同步次数,这个过程就叫锁粗化,比如
public void method(){
synchronized(lock){
A();
}
synchronized(lock){
B();
}
}
会被整合成如下形式:
public void method(){
synchronized(lock){
A();
B();
}
}
而在循环内申请锁,比如:
for(int i=0;i<10;++i){
synchronized(lock){
}
}
应将锁粗化为
synchronized(lock){
for(int i=0;i<10;++i){
}
}
6 无锁:CAS
毫无疑问,为了保证多线程并发的安全,使用锁是一种最直观的方式,但是,锁的竞争有可能会称为瓶颈,因此,有没有不需要锁的方式去保证数据一致性呢?
答案是有的,就是这一小节介绍的主角:CAS。
CAS就是Compare And Swap的缩写,CAS包含三个参数,形式为CAS(V,E,N),其中:
V表示内存地址值E表示期望值N表示新值
只有当V的值等于E的值时,才会把V设置为N,如果V的值和N的值不一样,那么表示已经有其他线程做了更新,当前线程什么也不做,最后CAS返回当前V的值。
CAS的操作是抱着乐观的态度进行的,总认为自己可以成功完成操作,当多个线程同时使用CAS操作同一个变量的时候,只会有一个胜出并成功更新,其他均会失败。失败的线程不会被挂起,仅被告知失败,并且允许再次尝试,当然也允许失败的线程放弃操作。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号