斜率优化入门小记
 www。
www。
斜率优化入门小记
本文仅作为我入门斜率优化 dp 的学习记录和总结。
引入
我们知道,当一个 1D/1D 的动态规划问题可以将方程写作形如 \(dp(i)=\min/\max\{dp(j)+a_i+b_j\}\) 的形式时,可以使用单调队列进行优化,将时间复杂度做到转移均摊 \(\mathcal O(1)\) 的时间复杂度。
实际问题中,部分 1D/1D 动态规划的转移方程写作 \(dp(i)=\min/\max\{dp(j)+a_i\times b_j+c_i+d_j\}\) 的形式。此时直接计算是 \(\mathcal O(n^2)\) 的。但是它仍具有很强的结构性,因此借助数学知识,我们仍然可以大幅优化其转移的时间复杂度。
斜率优化
以下内容可能较为冗长,可以选择性略过一些基础步骤。
I. 转化方程
假设当前的方程形式是 \(dp(i)=\min\{dp(j)+a_i\times b_j+c_i+d_j\}\)(\(\max\) 的情况类似,学会了以后不难自行推导),我们先将 \(\min\) 去掉,变为 \(dp(i)=dp(j)+a_i\times b_j+c_i+d_j\)。
考虑将原式分成三部分,方便处理:
- 只含 \(i\) 的项。
- 只含 \(j\) 的项。
- 包含 \(i,j\) 的项。
现在的形式:\(dp(i)=(dp(j)+d_j)+c_i+(a_i\times b_j)\)。
II. 凸包
用数形结合的思想理解凸包会较为容易。先从代数层面说起。
考虑转移的两个决策点 \(j_1,j_2\),不妨设 \(j_1\lt j_2\),若 \(j_2\) 优于 \(j_1\),则有:
记 \(val(j)=dp_j+d_j\),则:
发现右边的式子形式很熟悉,将点 \(j\) 的坐标视为 \((b_j,val(j))\),那么这个式子就代表着 \(j_1,j_2\) 两点间的斜率。
换言之,当前决策点 \(j_2\) 优于 \(j_1\),当且仅当 \(j_1,j_2\) 两点间的斜率 \(\le -a_i\)。反之,\(j_1\) 优于 \(j_2\)。
下面借助数形结合的思想直观地观察,考虑下图这种情况:

将 \(-a_i\) 视作一条直线画在图上,记斜率为 \(k_0\),直观地表现出来,显然只有三种情况:
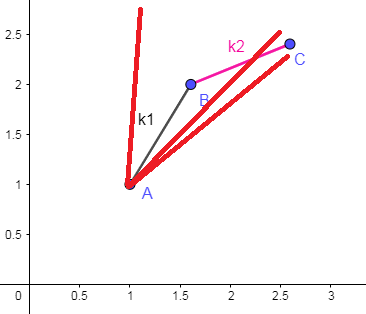
- \(k_0\ge k_1\gt k_2\),则 \(C\) 优于 \(B\) 优于 \(A\)。
- \(k_1\gt k_0\gt k_2\),则 \(C\) 优于 \(B\),且 \(A\) 优于 \(B\)。
- \(k_1\gt k_2\ge k_0\),则 \(A\) 优于 \(B\) 优于 \(C\)。
综上,无论哪种情况,\(B\) 都不会成为最优决策点,直接将其移除决策点集合。
事实上,上文图片中的结构叫作上凸包,其中的若干条直线斜率单调递减,在原方程取 \(\min\) 时,我们不断删去这一结构,最后会得到下面这一斜率单调递增的结构,称为下凸包:
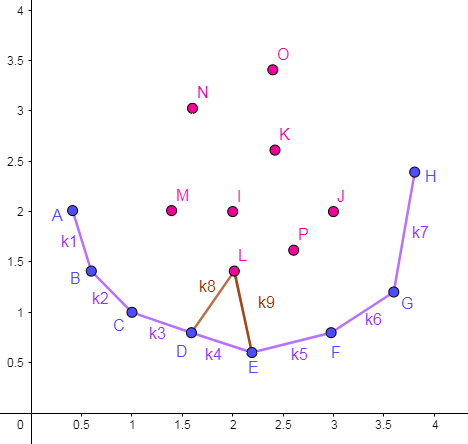
回顾我们最初提出的,当 \(j_1,j_2\) 间斜率 \(\le -a_i\),\(j_2\) 优于 \(j_1\)。
根据上述推导,最优决策点会在这个下凸包中产生。而一定存在一点 \(j\),使得其与左邻点间斜率 \(\le -a_i\),与右邻点间斜率 \(\gt -a_i\),那么 \(j\) 就是最优决策点。
又因下凸包点集的斜率单增,所以我们二分查找出第一个斜率 \(\gt -a_i\) 的线段,它的左端点即为最优决策点。
相似地,我们也可以推导出取 \(\max\) 的维护方式,或是将原式贡献取反,做取 \(\min\) 的计算,最后再将答案取反。
III. 线性规划
在上述过程中,我们主要使用代数思想推导,也使用了一定的图形辅助理解。接下来将用图形的角度去理解斜率优化。
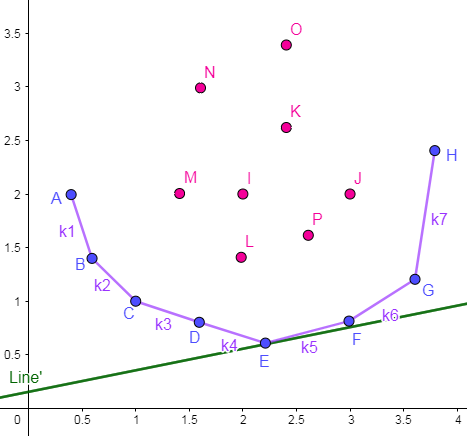
将原问题转化一下,可以抽象出以下模型:
给定点集 \(\{(x,y)\}\) 和斜率 \(k\),在点集中选择一点 \((x,y)\),使得满足条件 \(y=kx+b\) 的截距 \(b\) 最小化。
事实上,这就是线性规划问题。
运用 我还没学过 的知识,可以得到,上图 \(E\) 即为最优决策点。
从几何角度可以帮助我们更直观地认识学习这一问题。尤其是在考虑单调性时,它远比代数法清晰易懂。
优化转移
斜率优化 DP 主要是借助其良好的单调性。
我们分情况讨论。下文横坐标指的是加入凸包的点的横坐标。
I. 斜率单增,横坐标单增
在一些问题中,我们会遇到斜率随着 \(i\) 增大而单调递增的情形。这时我们借助单调队列,将凸包中前面斜率 \(\le\) 当前斜率的部分直接移除,可以做到 \(\mathcal O(n)\) 的时间复杂度。
II. 斜率不单增,横坐标单增
大部分情况下,斜率并不单增。这时我们就要采用上面提到过的二分法解决问题。时间复杂度 \(\mathcal O(n\log n)\)。
III. 斜率和横坐标均不单增
这本质上是个偏序问题。所以可以用 CDQ 分治维护,辅以单调队列+二分查找。当然也可以平衡树或李超线段树。
例题
代码注意一个问题:如果加入的一条线段两端点横坐标相等,无法计算斜率,需要特判并返回 inf/-inf。
[HNOI2008] 玩具装箱
令 \(s_i=\sum\limits_{j=1}^i c_j+1,L\gets L+1\),则:
斜率和横坐标均单增,\(\mathcal O(n)\) 维护即可。
[APIO2014] 序列分割
一个自然的想法是,分割并不容易考虑,将其视为 \(k+1\) 段合并,显然与原问题等价。
顺着这个思路,注意到合并的顺序并没有影响,因为不同段之间的两数必然会产生一次贡献。
将其带回原问题,发现仍然成立。
设 \(f_{i,k}\) 表示前 \(i\) 段分割 \(k\) 次的最小答案。
则:
斜率优化,顺便记一下决策点,递归输出方案即可。
时间复杂度 \(\mathcal O(nk)\)。
[P6047] 丝之割
本题引入了一个斜率优化中比较有用的方法论:去除无用物品。
发现直接做并不好做,考虑寻找性质。
观察到,若两条弦 \((u_i,v_i),(u_j,v_j)\) 满足 \(u_i\lt u_j,v_i\gt v_j\),那么显然 \(j\) 是不需要的,因为弦 \(i\) 「包含」弦 \(j\),那么割掉弦 \(i\) 时顺便就割掉了弦 \(j\),这样显然不劣。
由此,将有用的弦筛出,按 \(u_i\) 排序,那么 \(v_i\) 也递增。并且一条连线割掉的弦是一段区间的形式。也可以通过处理 \(a,b\) 的 前 / 后缀最大值,快速得到割一段弦的代价。
由于贡献是乘积的形式,斜率优化一下即可。
时间复杂度 \(\mathcal O(n)\)。
[USACO08 March Gold] Land Acquisition
同上题几乎一样的套路。从偏序角度考虑筛除无用物品。
[CEOI2017] Building Bridges
仍然是套路的斜率优化,不多赘述。
发现斜率和决策点横坐标均不递增,斜率可以用二分处理,但决策点不递增就比较麻烦。
考虑从偏序的角度出发,用 CDQ 分治维护,消除决策点不递增的问题。
注意:在 CDQ 维护 dp 时,正确的分治顺序应是 solve(l,mid);calculate;solve(mid+1,r),因为 \([l,mid]\) 会影响 \([mid+1,r]\) 内部的转移。
Reference
https://www.cnblogs.com/Xing-Ling/p/11210179.html
https://www.luogu.com.cn/blog/ningago-lsh/xie-lv-you-hua-dp
https://www.cnblogs.com/alex-wei/p/DP_optimization_method_II.html
《算法竞赛进阶指南》 0x5A 斜率优化

 浙公网安备 33010602011771号
浙公网安备 33010602011771号