机器学习基础:线性回归小结
CONTENT
1.线性回归形式和损失函数
2.线性回归的求解算法
3.多项式回归和广义线性回归
4.线性回归中的正则化
5.代码实践
- 数据准备
- sklearn 线性回归
- scripts with dirty hands
- 梯度下降法求解
- 最小二乘法求解
- 牛顿法求解
- Ridge回归
1. 线性回归形式和损失函数
1.1 基本形式
\[h_θ(x_1,x_2,...x_n)=θ_0+θ_1x_1+...+θ_nx_n
\]
简化表示为
\[h_θ(x_0,x_1,...x_n)=\sum_{i=0}^{n}θ_ix_i
\]
1.2 损失函数
代数法表示:
\[J(θ_0,θ_1...,θ_n)=\sum_{j=1}^{m}(\sum_{i=0}^{n}\theta_ix_i-y_j)
\]
矩阵表示:
\[J(θ)=\frac{1}{2}(Xθ−Y)^T(Xθ−Y)
\]
注: m为样本个数, n为特征个数加一
2. 线性回归的求解算法
2.1 梯度下降算法
设定初始参数 ,不断迭代,使得
,不断迭代,使得 最小化,θ的迭代公式如下:
最小化,θ的迭代公式如下:
\[θ=θ−αX^T(Xθ−Y)
\]
当J为凸函数时,梯度下降法相当于让参数\(\theta\)不断向J的最小值位置移动
梯度下降法的缺陷:如果函数为非凸函数,有可能找到的并非全局最优值,而是局部最优值。
2.2 最小二乘法
令:
\[\frac{\partial}{\partial\theta}J(\theta) = X^T(X\theta-Y) = 0
\]
利用矩阵的链式求导法则,和两个矩阵的求导公式:
\[公式一: \partial_{X}(X^TX) = 2X \\
公式二: \nabla_{X}f(AX+B) = A^T\nabla_{Y}f, Y = AX+B
\]
整理得到:
\[θ=(X^TX)^{−1}X^TY
\]
- 最小二乘法需要计算\(X^TX\)的逆矩阵,有可能它的逆矩阵不存在,这样就没有办法直接用最小二乘法了,此时梯度下降法仍然可以使用。当然,我们可以通过对样本数据进行整理,去掉冗余特征。让\(X^TX\)的行列式不为0,然后继续使用最小二乘法。
- 当样本特征n非常的大的时候,计算\(X^TX\)的逆矩阵是一个非常耗时的工作(nxn的矩阵求逆),甚至不可行。此时以梯度下降为代表的迭代法仍然可以使用。那这个n到底多大就不适合最小二乘法呢?如果你没有很多的分布式大数据计算资源,建议超过10000个特征就用迭代法吧。或者通过主成分分析降低特征的维度后再用最小二乘法。
- 如果拟合函数不是线性的,这时无法使用最小二乘法,需要通过一些技巧转化为线性才能使用,此时梯度下降仍然可以用
- 特殊情况下,当样本量m很少,小于特征数n的时候,这时拟合方程是欠定的,常用的优化方法都无法去拟合数据。当样本量m等于特征数n的时候,用方程组求解就可以了。当m大于n时,拟合方程是超定的,也就是我们常用与最小二乘法的场景了。
2.3 牛顿法
将\(J(\theta)\)泰勒展开到二阶:
\[J(\theta) = J(\theta_0) + J^{'}(\theta_0)(\theta-\theta_0) + \frac{1}{2}J^{''}(\theta_0)(\theta-\theta_0)^2
\]
两边求导,得:
\[\theta = \theta_0 - \frac{J^{'}(\theta_0)}{J^{''}(\theta_0)}
\]
重复迭代式可以利用Hessian矩阵:
\[\theta =\theta - H^{-1}\Delta_{\theta}l(\theta)
\]
牛顿法的收敛速度非常快,但海森矩阵的计算较为复杂,尤其当参数的维度很多时,会耗费大量计算成本。可以用其他矩阵替代海森矩阵,用拟牛顿法进行估计
2.4 拟牛顿法
拟牛顿法的思路是用一个矩阵替代计算复杂的海森矩阵H,因此要找到符合H性质的矩阵。
要求得海森矩阵符合的条件,同样对泰勒公式求导\(f'(x) = f'(x_0) + f''(x_0)x -f''(x_0)x_0\)
令\(x = x_1\),即迭代后的值,代入可得:
\[f'(x_1) = f'(x_0) + f''(x_0)x_1 - f''(x_0)x_0
\]
更一般的
\[𝑓′(𝑥𝑘+1)=𝑓′(𝑥𝑘)+𝑓″(𝑥𝑘)𝑥𝑘+1−𝑓″(𝑥𝑘)𝑥𝑘f′(xk+1)=f′(xk)+f″(xk)xk+1−f″(xk)xk \\
𝑓′(𝑥𝑘+1)−𝑓′(𝑥𝑘)=𝑓″(𝑥𝑘)(𝑥𝑘+1−𝑥𝑘)=𝐻(𝑥𝑘+1−𝑥𝑘)f′(xk+1)−f′(xk)=f″(xk)(xk+1−xk)=H(xk+1−xk)
\]
x_k为第k个迭代值
即找到矩阵G,使得它符合上式。 常用的拟牛顿法的算法包括DFP,BFGS等。
3. 多项式回归和广义线性回归
3.1 多项式回归
回到开始的线性模型
\[h_\theta(x_1,x_2,...x_n)=θ_0+θ_1x_1+...+θ_nx_n
\]
, 如果这里不仅仅是x的一次方,比如增加二次方,那么模型就变成了多项式回归。这里写一个只有两个特征的p次方多项式回归的模型:
\[h_θ(x_1,x_2)=θ_0+θ_1x_1+θ_2x_2+θ_3x^2_1+θ_4x^2_2+θ_5x_1x_2
\]
令\(*x*_0=1,x_1=x_1,x_2=x_2,x_3=x^2_1,x_4=x^2_2,x_5=x_1x_2\)
这样我们就得到了下式:
\[h_θ(x_1,x_2)=θ_0+θ_1x_1+θ_2x_2+θ_3x_3+θ_4x_4+θ_5x_5
\]
可以发现,又重新回到了线性回归,这是一个五元线性回归,可以用线性回归的方法来完成算法。对于每个二元样本特征(x1,x2), 得到一个五元样本特征(1,x1,x2,x21,x22,x1x2),通过这个改进的五元样本特征,重新把不是线性回归的函数变回线性回归。
3.2 广义线性回归
输出Y不满足和X的线性关系,但是lnY 和X满足线性关系,模型函数如下:
\[\ln{Y} = X\theta
\]
这样对与每个样本的输入y,我们用 lny去对应, 从而仍然可以用线性回归的算法去处理这个问题。
4. 线性回归中的正则化
4.1 L1正则
Lasso 回归
\[J(θ)=\frac{1}{2}(Xθ−Y)^T(Xθ−Y) + \alpha\left\|\theta\right\|_1
\]
Lasso回归可以使得一些特征的系数变小,甚至还是一些绝对值较小的系数直接变为0。增强模型的泛化能力。Lasso回归的求解办法一般有坐标轴下降法(coordinate descent)和最小角回归法( Least Angle Regression)。
4.2 L2正则
Ridge回归
\[J(θ)=\frac{1}{2}(Xθ−Y)^T(Xθ−Y) + \frac{1}{2}\alpha\left\|\theta\right\|_2^2
\]
Ridge回归在不抛弃任何一个特征的情况下,缩小了回归系数,使得模型相对而言比较的稳定,但和Lasso回归比,这会使得模型的特征留的特别多,模型解释性差。
Ridge回归的求解比较简单,一般用最小二乘法。这里给出用最小二乘法的矩阵推导形式,和普通线性回归类似。
\[\theta = (X^TX + \alpha E)^{-1}X^TY
\]
5. 代码实践
5.1 数据准备
import numpy as np
np.random.seed(1234)
x = np.random.rand(500,3)
y = x.dot(np.array([4.2,5.7,10.8]))
5.2 sklearn 线性回归
import numpy as np
from sklearn.linear_model import LinearRegression
import matplotlib.pyplot as plt
%matplotlib inline
lr = LinearRegression(fit_intercept=True)
lr.fit(x,y)
print("估计的参数值为:%s" %(lr.coef_))
print('R2:%s' %(lr.score(x,y)))
x_test = np.array([2,4,5]).reshape(1,-1)
y_hat = lr.predict(x_test)
print("预测值为: %s" %(y_hat))
5.3 scripts with dirty hands
5.3.1 梯度下降法求解
class LR_GD():
def __init__(self):
self.w = None
def fit(self,X,y,alpha=0.02,loss = 1e-10):
y = y.reshape(-1,1)
[m,d] = np.shape(X)
self.w = np.zeros((d))
tol = 1e5
while tol > loss:
h_f = X.dot(self.w).reshape(-1,1)
theta = self.w + alpha*np.mean(X*(y - h_f),axis=0)
tol = np.sum(np.abs(theta - self.w))
self.w = theta
def predict(self, X):
y_pred = X.dot(self.w)
return y_pred
if __name__ == "__main__":
lr_gd = LR_GD()
lr_gd.fit(x,y)
print("估计的参数值为:%s" %(lr_gd.w))
x_test = np.array([2,4,5]).reshape(1,-1)
print("预测值为:%s" %(lr_gd.predict(x_test)))
5.3.2 最小二乘法求解
class LR_LS:
def __init__(self, fit_intercept=True):
self.w = None
self.fit_intercept = fit_intercept
def fit(self, X, y):
if self.fit_intercept:
X = np.c_[np.ones(X.shape[0]), X]
pseudo_inverse = np.dot(np.linalg.inv(np.dot(X.T, X)), X.T)
self.w = np.dot(pseudo_inverse, y)
def predict(self, X):
if self.fit_intercept:
X = np.c_[np.ones(X.shape[0]), X]
return np.dot(X, self.w)
5.3.3 牛顿法求解
步骤如下:
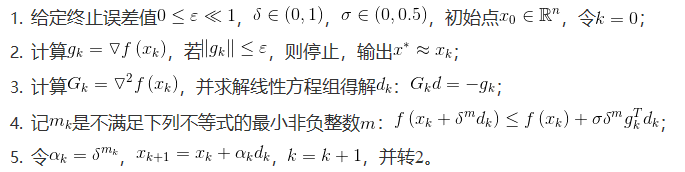
def first_derivativ(X, y, w):
return np.matmul(X.T, np.matmul(X, w) - y)
def second_derivative(X):
return np.matmul(X.T, X)
def get_error(X, y, w):
tmp = np.matmul(X, w) - y
return np.matmul(tmp.T, tmp) / 2
def get_min_m(X, y, sigma, delta, d, w, g):
m = 0
while True:
w_new = w + pow(sigma, m) * d
left = get_error(X, y , w_new)
right = get_error(X, y , w) + delta * pow(sigma, m) * g.T * d
if left <= right:
break
else:
m += 1
return m
class LR_NEWTON():
def __init__(self):
self.w = None
def fit(self, X, y, max_iter=50, sigma=0.5, delta=0.25):
'''
sigma : (0, 1)
delta : (0. 0.5)
'''
print(type(X))
n = X.shape[1]
self.w = np.mat(np.ones((n, 1)))
it = 0
while it <= max_iter:
g = first_derivativ(X, y, self.w)
G = second_derivative(X)
try:
d = -np.linalg.inv(G) * g
except Exception:
print('不可逆')
break
m = get_min_m(X, y, sigma, delta, d, self.w, g)
self.w = self.w + pow(sigma, m) * d
if it % 10 == 9:
print ("\t---- itration: ", it, " , error: ", get_error(X, y , self.w)[0, 0])
it += 1
def predict(self, X):
y_pred = X.dot(self.w)
return y_pred
if __name__ == "__main__":
lr_nt = LR_NEWTON()
lr_nt.fit(x,y.reshape(-1,1))
print("估计的参数值为:%s" %(lr_nt.w))
x_test = np.array([2,4,5,2,4,5,2,4,5]).reshape(1,-1)
print("预测值为:%s" %(lr_nt.predict(x_test)))
5.3.4 Ridge回归
class RidgeRegression:
def __init__(self, fit_intercept=True):
self.w = None
self.fit_intercept = fit_intercept
def fit(self, X, y, alpha=1):
if self.fit_intercept:
X = np.c_[np.ones(X.shape[0]), X]
A = alpha * np.eye(X.shape[1])
pseudo_inverse = np.dot(np.linalg.inv(np.dot(X.T, X) + A), X.T)
self.w = np.dot(pseudo_inverse, y)
def predict(self, X):
if self.fit_intercept:
X = np.c_[np.ones(X.shape[0]), X]
return np.dot(X, self.w)
if __name__ == "__main__":
lr_ridge = RidgeRegression()
lr_ridge.fit(x,y.reshape(-1,1))
print("估计的参数值为:%s" %(lr_ridge.w))
x_test = np.array([2,4,5,2,4,5,2,4,5]).reshape(1,-1)
print("预测值为:%s" %(lr_ridge.predict(x_test)))



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· AI与.NET技术实操系列(二):开始使用ML.NET
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
· 【自荐】一款简洁、开源的在线白板工具 Drawnix
· 园子的第一款AI主题卫衣上架——"HELLO! HOW CAN I ASSIST YOU TODAY
· Docker 太简单,K8s 太复杂?w7panel 让容器管理更轻松!