
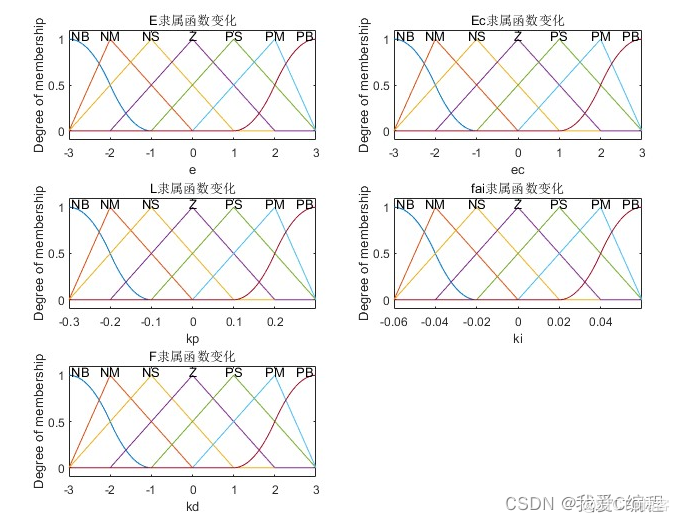
m基于matlab的模糊控制器仿真实现,采用matlab编程方式定义模糊规则,隶属函数等
1.算法仿真效果
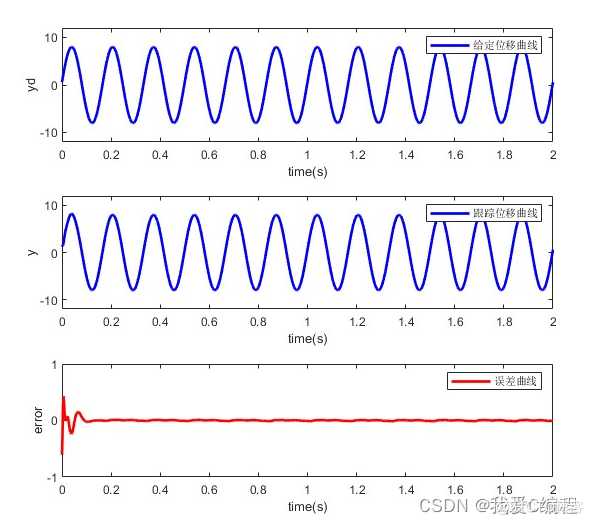
matlab2022a仿真结果如下:
2.算法涉及理论知识概要
利用模糊数学的基本思想和理论的控制方法。在传统的控制领域里,控制系统动态模式的精确与否是影响控制优劣的最主要关键。系统动态的信息越详细,则越能达到精确控制的目的。
然而,对于复杂的系统,由于变量太多,往往难以正确的描述系统的动态,于是工程师便利用各种方法来简化系统动态,以达成控制的目的,但却不尽理想。换言之,传统的控制理论对于明确系统有强而有力的控制能力,但对于过于复杂或难以精确描述的系统,则显得无能为力了。因此便尝试着以模糊数学来处理这些控制问题。
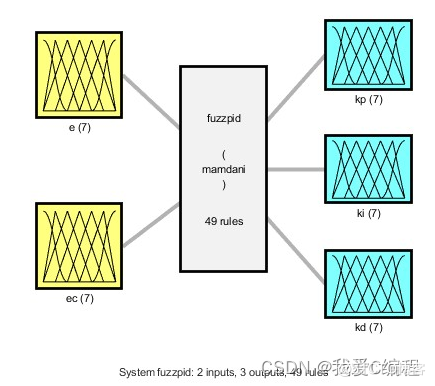
模糊控制器包括四部分:
(1)模糊化。主要作用是选定模糊控制器的输入量,并将其转换为系统可识别的模糊量,具体包含以下三步:
第一,对输入量进行满足模糊控制需求的处理;
第二,对输入量进行尺度变换;
第三,确定各输入量的模糊语言取值和相应的隶属度函数。
(2)规则库。根据人类专家的经验建立模糊规则库。模糊规则库包含众多控制规则,是从实际控制经验过渡到模糊控制器的关键步骤。
(3)模糊推理。主要实现基于知识的推理决策。
(4)解模糊。主要作用是将推理得到的控制量转化为控制输出。
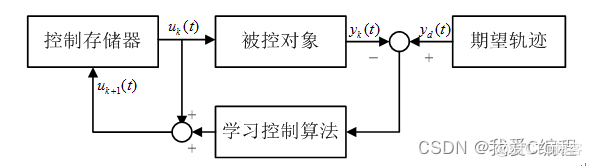
第一部分:控制存储器
这个部分比较简单,就是将当前时刻的数据进行保存,作为下一时刻的学习控制算法模块的输出的相加项,然后得到新输出。其对应的程序如下所示:
第二部分:被控对象
控制对象,在matlab编程的时候,我们一般使用的是传递函数来标示,在参考文献中,关于控制对象的介绍似乎没有讲,一般这种情况,我们设置一个传递函数作为控制对象来研究我们的控制算法。
很多研究控制算法的课题,如果不知道控制对象具体的传递函数表达式,我们一般都设置一个传递函数作为控制对象进行控制算法的研究,如果你在自己的论文中已经设计了一个控制对象的传递函数,那么直接替换即可。
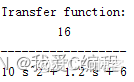
在本课题中,控制对象的传递函数我们设置为如下的表达式:
第三部分:学习控制算法
这个部分是程序算法的重点,这里我们重点介绍 一下这个部分的实现过程。首先我们要做的是模糊PID控制器,论文中关于PID学习控制算法的主要表达式为:

然后这里控制器采用模糊PID控制器,然后迭代过程采用公式6.3来进行。注意,由于加入遗忘因子的话,在模糊PID中,收敛值收敛到0会变得非常的困难,故这里我们使用不带遗忘因子的公式。
3.MATLAB核心程序
a=addrule(a,rulelist);
a=setfis(a,'DefuzzMethod','mom');
writefis(a,'fuzzpid');
a=readfis('fuzzpid');
%显示规则
showrule(a)
%%
%控制对象的设置
%采样时间
ts = 0.002;
%产生连续形式的传递函数
Gp = tf([16],[10,1.2,6]);
%产生离散形式的传递函数
Gpz = c2d(Gp,ts,'z');
%将传递函数转换为差分式子
[num,den] = tfdata(Gpz,'v');
%%
%控制算法初始参数
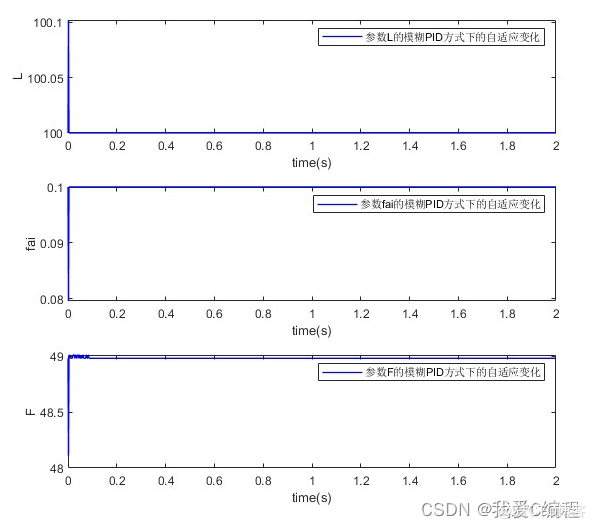
L = 100;
fai = 0.1;
F = 50;
%此变量分别保存误差,误差积分以及误差导数
Err = [0,0,0]';
%延迟变量
y_1 = 0;
y_2 = 0;
u_1 = 0;
u_2 = 0;
e_1 = 0;
ei = 0;
ed = 0;
%%
%迭代过程
Time = 1001;
u = zeros(1,Time);
Pk = L*ones(1,Time);
Ik = fai*ones(1,Time);
Dk = F*ones(1,Time);
M = 8;
Ed = 0.0;
Ecd = 0.0;
for i=0:1:M
for k=1:1:Time
%产生时间变量
time(k) = (k-1)*ts;
%给定轨迹输入
yd(k) = 8*sin(6*2*pi*k*ts);
%根据模糊规则,进行PID参数的更新
k_pid = evalfis([Ed,Ecd],a);
Pk(k) = L + k_pid(1);
Ik(k) = fai+ k_pid(2);
Dk(k) = F + k_pid(3);
%控制对象模型的输出
.......................................................................
%使用延迟程序起到存储器的功能
u2(k) = u(k);
e_1 = e(k);
y_2 = y_1;
y_1 = y(k);
u_2 = u_1;
u_1 = u2(k);
Ed = e(k);
Ecd = e(k)-e_1;
end
i=i+1;
end

 浙公网安备 33010602011771号
浙公网安备 33010602011771号