基于ADRC自抗扰控制器的simulink仿真,ESO和TD等模块使用S函数开发
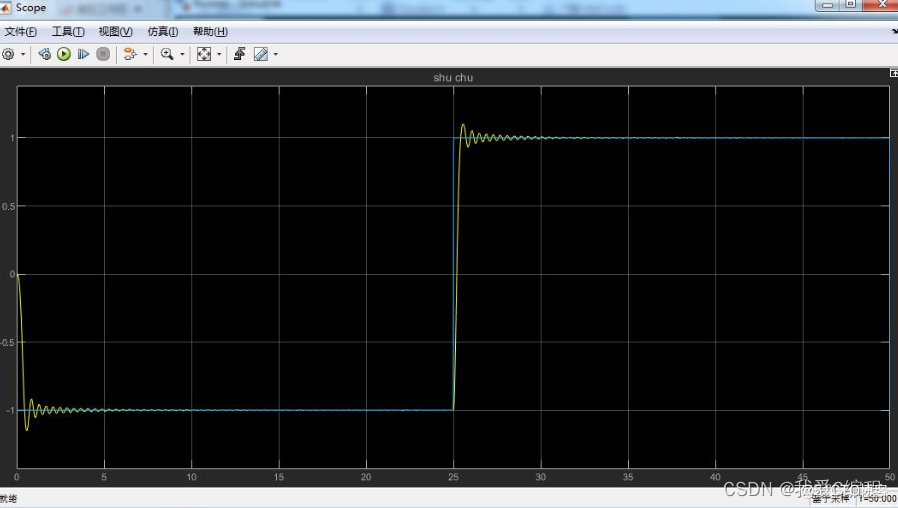
1.算法仿真效果
matlab2022a仿真结果如下:
2.算法涉及理论知识概要
自抗扰控制器主要由三部分组成:跟踪微分器(tracking differentiator),扩展状态观测器 (extended state observer) 和非线性状态误差反馈控制律(nonlinear state error feedback law)。
自抗扰控制器自PID控制器演变过来,采取了PID误差反馈控制的核心理念。传统PID控制直接取参考给定与输出反馈之差作为控制信号,导致出现响应快速性与超调性的矛盾。
跟踪微分器的作用是安排过渡过程,给出合理的控制信号,解决了响应速度与超调性之间的矛盾。扩展状态观测器用来解决模型未知部分和外部未知扰动综合对控制对象的影响。虽然叫做扩展状态观测器,但与普通的状态观测器不同。扩展状态观测器设计了一个扩展的状态量来跟踪模型未知部分和外部未知扰动的影响。然后给出控制量补偿这些扰动。将控制对象变为普通的积分串联型控制对象。设计扩展状态观测器的目的就是观测扩展出来的状态变量,用来估计未知扰动和控制对象未建模部分,实现动态系统的反馈线性化,将控制对象变为积分串联型。非线性误差反馈控制律给出被控对象的控制策略。
自抗扰控制是在PID控制算法基础上进行改进的新型控制方法,它具有不依赖于控制对象模型、不区分系统内外扰的结构特点。常用的自抗扰控制器主要由跟踪微分器(Tracking Differentiator,TD)、扩张状态观测器(Extended State Observer,ESO)和非线性状态误差反馈控制率(Nonlinear State Error Feedback,NLSEF)三部分组成。
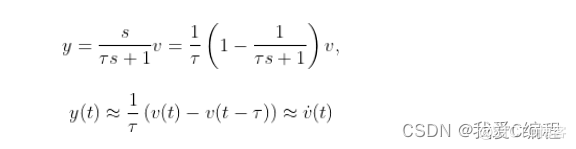
跟踪微分器的作用是针对被控对象的输入特点对其提取所需要的信号。
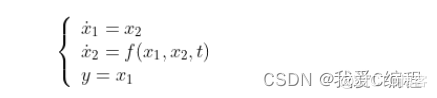
扩张状态观测器作为自抗扰控制的核心组成部分,一方面可以对系统中重要的状态变量进行跟踪,便于实时了解系统状态;另一方面还能根据系统模型内外扰动的总体作用量,以反馈的形式对其加以及时补偿,有助于提高系统鲁棒性。
非线性状态误差反馈控制率是一种非线性的组合方式,输入是TD输出的状态变量与ESO状态估计值之间的误差,输出结合ESO的总扰动补偿值得到控制器的控制量。
跟踪微分器(TD)
扩张状态观测器(ESO)
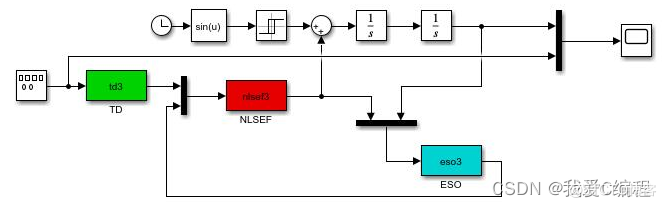
ADRC控制器结构如图所示。自抗扰的根本在于使用补偿项将系统“不确定模型”和“未知外扰”的总和作用共同作为总扰动进行观测和补偿。
function [sys,x0,str,ts] = mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 2;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 2;
sizes.NumInputs = 1;
sizes.DirFeedthrough = 0;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [0;0];
str = [];
ts = [-1 0];
function sys = mdlDerivatives(x,u,r,d)
sys(1,1) = x(2);
sys(2,1) = -r*fst2(x,u,r,d);
function sys = mdlOutputs(x)
sys = x;
function f = fst2(x,u,r,d)
v=x(1)-u+abs(x(2))*x(2)/(2*r);
if v>=d
f=sign(v);
else f=v/d;
end

 浙公网安备 33010602011771号
浙公网安备 33010602011771号