m基于sift特征提取和模板匹配的车标识别算法matlab仿真
1.算法描述
车标识别技术研究是近几年出现的,尚未成熟。智能交通系统主要应用于高速公路收费管理系统、高速公路超速自动化监管系统、公路布控管理系统、城市交通路口的“电子警察”,以及停车场收费管理系统等。汽车标志作为汽车重要特征之一,其识别也是识别出汽车类型的重要因素之一,因此成为交通系统的重要组成部分。所以,人们开始关注这一特征的研究,并提出一些关于车标定位与识别的方法,但大部分是借用车牌与人脸的定位及识别方法。
随着社会经济、道路交通迅速发展,车辆保有量及交通出行量猛增,车辆管理的困难越来越大。因此,智能交通系统,被提到了重要的位置。智能交通系统是为了辅助解决日益膨胀的地面交通的诸多困难而出现的一个新的技术领域,它是以信息技术为代表的高新技术在道路交通运输中的集成应用,受到世界各国高度重视,发展极为迅速。然而,随着机动车辆数量不断增加,交通事故、违章逃逸、盗抢机动车和以机动车为工具流窜作案等类型案件也显著增加。盗抢车辆案犯往往以小型车,特别是中、高档轿车作为作案重点,得手后通过更换车辆牌照,改变车辆外观。比如改变车辆颜色或发动机的号码等,迅速逃往外地进行销赃和使用字母的一部分被用细砂打磨光,从而变成了`将车牌中的和互相修改很多司机的后车牌由于安装了“移动牌照架”后,都是随时可以装卸的移动牌照架为一个车牌大小的黑色塑料框,被安装在车牌外侧,框下方有两个锁,开锁后牌照架可随框上轴上下活动等,因此这些经改装后的车辆,单靠车牌识别,加大了破案和抓获的难度。
为此,车标识别增加了智能交通系统的识别率,对打击盗抢机动车和其它利用车辆违法犯罪包括交通事故、违章逃逸、走私、拼装车、报废车再用行为具有显著作用。为了避免人工干预所带来的弊端,提高管理效率,对车辆自动识别系统的需求和标准的要求越来越高。现在世界上有很多研究人员在从事车辆识别系统的研究。车辆识别系统能够有效的利用在车辆管理、流量控制、高速公路收费登记和进行车辆身份自动认证。当然,能完成上述功能技术至少还有两种基于条形码的鉴别和无线电频率鉴别既。但汽车标志识别具有明显的优点其一是它不需要在汽车上附加设备,其二是因为它根据是图像识别,所以通过人的参与可以解决任何系统的识别错误。汽车标志识别主要包括汽车标志的定位和识别两个部分,由于车标自身的特性,使得车标定位及识别成为难点。本课题是一个前瞻性的研究课题,至今还没有一个比较成熟、具有广泛适应性的系统,所以本课题的研究是具有广泛的实用价值、意义和应用前景。
SIFT 是一种从图像中提取独特不变特征的方法,其特点为基于图像的一些局部特征,而与图像整体的大小和旋转无关。并且该方法对于光照、噪声、仿射变换具有一定鲁棒性,同时能生成大量的特征点。SIFT (Scale-invariant feature transform), 尺度不变特征转换,是一种图像局部特征提取算法,它通过在不同的尺度空间中寻找极值点(特征点,关键点)的精确定位和主方向,构建关键点描述符来提取特征。
SIFT提取的关键点具有尺度不变性、旋转不变性,而且不会因光照、仿射变换和噪音等因素而干扰。SIFT所查找到的关键点是一些十分突出、不会因光照、仿射变换和噪音等因素而变化的点,如角点、边缘点、暗区的亮点及亮区的暗点等。
1. SIFT特征是图像的局部特征,其对旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换、噪声也保持一定程度的稳定性;
2. 独特性(Distinctiveness)好,信息量丰富,适用于在海量特征数据库中进行快速、准确的匹配;
3. 多量性,即使少数的几个物体也可以产生大量的SIFT特征向量;
4. 高速性,经优化的SIFT匹配算法甚至可以达到实时的要求;
5. 可扩展性,可以很方便的与其他形式的特征向量进行联合。
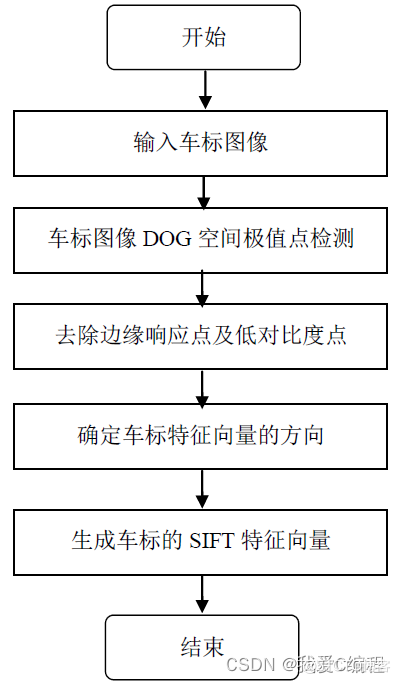
车标SIFT特征向量提取算法特征向量提取算法流程如图 :
2.仿真效果预览
matlab2022a仿真结果如下:




3.MATLAB核心程序
%车标的初步定位
BW0 = bwareaopen(Img3,400);
[rows,cols] = size(BW0);
[L,n] = bwlabel(BW0);
for i=1 : n
[r,c]=find(L==i);
a1(i)=max(r);
a2(i)=min(r);
b1(i)=max(c);
b2(i)=min(c);
w(i)=b1(i)-b2(i);
h(i)=a1(i)-a2(i);
square = w(i)*h(i);
if square > 1000
Yc = (a1(i) + a2(i))/2;
Xc = (b1(i) + b2(i))/2;
end
end
Xc2 = Xc;
Yc2 = Yc-75;
xl = Yc2-40;
xr = Yc2+40;
yl = Xc2-50;
yr = Xc2+50;
CB = Img2(xl:Yc2+40,Xc2-50:Xc2+50,:);
figure(1);
imshow(Img2);
hold on
plot([b2:b1],a1*ones(size([b2:b1])),'r','linewidth',2);
hold on
plot([b2:b1],a2*ones(size([b2:b1])),'r','linewidth',2);
hold on
plot(b1*ones(size([a2:a1])),[a2:a1],'r','linewidth',2);
hold on
plot(b2*ones(size([a2:a1])),[a2:a1],'r','linewidth',2);
hold on
plot([yl:yr],xl*ones(size([yl:yr])),'g','linewidth',2);
hold on
plot([yl:yr],xr*ones(size([yl:yr])),'g','linewidth',2);
hold on
plot(yr*ones(size([xl:xr])),[xl:xr],'g','linewidth',2);
hold on
plot(yl*ones(size([xl:xr])),[xl:xr],'g','linewidth',2);
hold on
title('车标初步定位');
im1 = Img1;
im2 = rgb2gray(CB);
%基于SIFT的定位
gray1=(im1);
gray2=(im2);
[des1,loc1]=func_sift(gray1);
[des2,loc2]=func_sift(gray2);
figure(2);
func_drawPoints(im1,loc1,im2,loc2);
Num=2;Thresh=0.85;
match=func_BidirectionalMatch(des1,des2,Num,Thresh);
clear des1 des2
if isempty(match) == 0
loc1=loc1(match(:,1),:);
loc2=loc2(match(:,2),:);
figure(3);
func_linePoints(im1,loc1,im2,loc2);
Lens(kk) = length(match);
else
Lens(kk) = 0;
end
pause(0.0000000001);
end
[V,I] = max(Lens);
for kk = I
if kk == 1
Img1 = I1;
end
if kk == 2
Img1 = I2;
end
if kk == 3
Img1 = I3;
end
if kk == 4
Img1 = I4;
end
%将图片大小进行统一
Img2 = imresize(Img2,[480,640]);
%%
%车牌的定位
[R,C,K] = size(Img2);
Img3 = zeros(R,C);
for i = 1:R
for j = 1:C
%候选区域的确定
if (Img2(i,j,1)<20) & (Img2(i,j,2)<20) & (Img2(i,j,3)>100)
Img3(i,j) = 1;
end
end
end
%%
%车标的初步定位
BW0 = bwareaopen(Img3,400);
[rows,cols] = size(BW0);
[L,n] = bwlabel(BW0);
for i=1 : n
[r,c]=find(L==i);
a1(i)=max(r);
a2(i)=min(r);
b1(i)=max(c);
b2(i)=min(c);
w(i)=b1(i)-b2(i);
h(i)=a1(i)-a2(i);
square = w(i)*h(i);
if square > 1000
Yc = (a1(i) + a2(i))/2;
Xc = (b1(i) + b2(i))/2;
end
end
Xc2 = Xc;
Yc2 = Yc-75;
xl = Yc2-40;
xr = Yc2+40;
yl = Xc2-50;
yr = Xc2+50;
CB = Img2(xl:Yc2+40,Xc2-50:Xc2+50,:);
figure(1);
imshow(Img2);
hold on
plot([b2:b1],a1*ones(size([b2:b1])),'r','linewidth',2);
hold on
plot([b2:b1],a2*ones(size([b2:b1])),'r','linewidth',2);
hold on
plot(b1*ones(size([a2:a1])),[a2:a1],'r','linewidth',2);
hold on
plot(b2*ones(size([a2:a1])),[a2:a1],'r','linewidth',2);
hold on
plot([yl:yr],xl*ones(size([yl:yr])),'g','linewidth',2);
hold on
plot([yl:yr],xr*ones(size([yl:yr])),'g','linewidth',2);
hold on
plot(yr*ones(size([xl:xr])),[xl:xr],'g','linewidth',2);
hold on
plot(yl*ones(size([xl:xr])),[xl:xr],'g','linewidth',2);
hold on
title('车标初步定位');
im1 = Img1;
im2 = rgb2gray(CB);
%基于SIFT的定位
gray1=(im1);
gray2=(im2);
[des1,loc1]=func_sift(gray1);
[des2,loc2]=func_sift(gray2);
figure(2);
func_drawPoints(im1,loc1,im2,loc2);
Num=2;Thresh=0.85;
match=func_BidirectionalMatch(des1,des2,Num,Thresh);
clear des1 des2
if isempty(match) == 0
loc1=loc1(match(:,1),:);
loc2=loc2(match(:,2),:);
figure(3);
func_linePoints(im1,loc1,im2,loc2);
Lens(kk) = length(match);
else
Lens(kk) = 0;
end
pause(0.0000000001);
end

 浙公网安备 33010602011771号
浙公网安备 33010602011771号