m基于GRNN广义回归神经网络的飞机发动机剩余寿命预测matlab仿真,训练集采用C-MAPSS数据集
1.算法描述
GRNN建立在非参数核回归基础上,以样本数据为后验条件,通过执行诸如Parzen非参数估计,从观测样本里求得自变量和因变量之间的联结概率密度函数之后,直接计算出因变量对自变量的回归值。GRNN不需要设定模型的形式,但是其隐回归单元的核函数中有光滑因子,它们的取对网络有很大影响,需优化取值。GRNNb论具有良好的函数逼近性能,而且因为其网络训练更为方便,因此,GRNN在信号过程、结构分析、控制决策系统、金融领域、生物工程领域等各个科学和工程领域得到了广泛的应用。
广义回归神经网络的理论基础是非线性核回归分析,非独立变量y相对于独立变量x的回归分析实际上是计算具有最大概率值的y。设随机变量x和y的联合概率密度函数为f (x ,y),已知x的观测值为X,则y相对于X的回归,即条件均值为:

对于未知的概率密度函数f (x, y),可由x和y的观测样本经非参数估计得:

GRNN通常被用来进行函数逼近。它具有一个径向基隐含层和一个特殊的线性层。第一层和第二层的神经元数目都与输入的样本向量对的数目相等。GRNN结构如图所示,整个网络包括四层神经元:输入层、模式层、求和层与输出层。
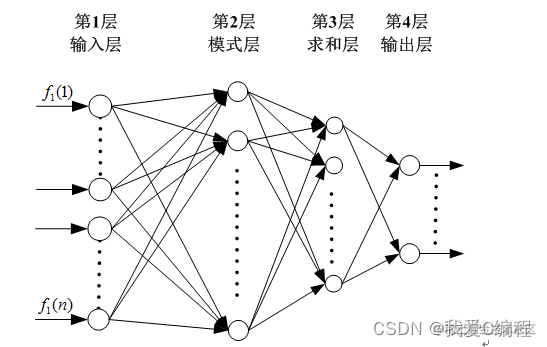
输入层的神经元数目与学习样本中输入向量的维数m相等,每个神经元都是一个简单的分布单元,这些神经元直接将输入变量传递到隐含层中。
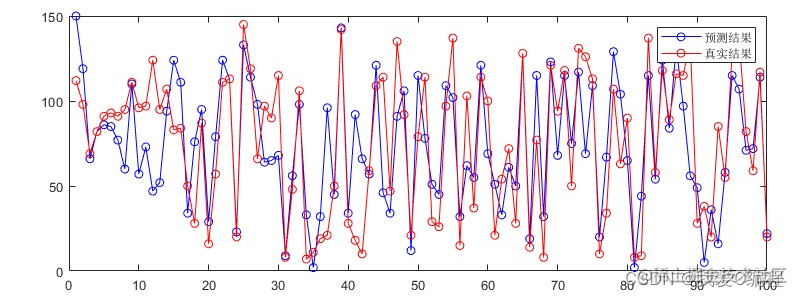
C-MAPSS Data Set里面有一个read me 的 txt文件。training 是给建模用的。 test 和 rul 是给 建模后验证用的。 每个 test 里面都有100组情况 对应的 rul里面有 100个数值。 rul 里面的数值就是真实值。 建模之后 跑test的数据 应该 给出接近rul的数值
1.1数据分析
1) unit number
2) time, in cycles
3) operational setting 1
4) operational setting 2
5) operational setting 3
6) sensor measurement 1
7) sensor measurement 2
...
26) sensor measurement 26
数据第一列是机器的编号,第二列是每个机器的运行的时间序列标号,3~5是对应的设置,6~最后一列是传感器的测量值。
2.仿真效果预览
matlab2022a仿真结果如下:
3.MATLAB核心程序
%%
%Step1
STR = 1;%选择数据标号1,2,3,4
Name_Train = ['data\00',num2str(STR),'\','train_FD00',num2str(STR),'.txt'];
Name_RUL = ['data\00',num2str(STR),'\','RUL_FD00',num2str(STR),'.txt'];
%读取数据
Data_Train = load(Name_Train);
Data_RUL = load(Name_RUL);
%%
%Step2
%计算每个机器的时间
%得到机器编号
Mach_No = unique(Data_Train(:,1));
for i = 1:length(Mach_No)
Index = find(Data_Train(:,1) == i);
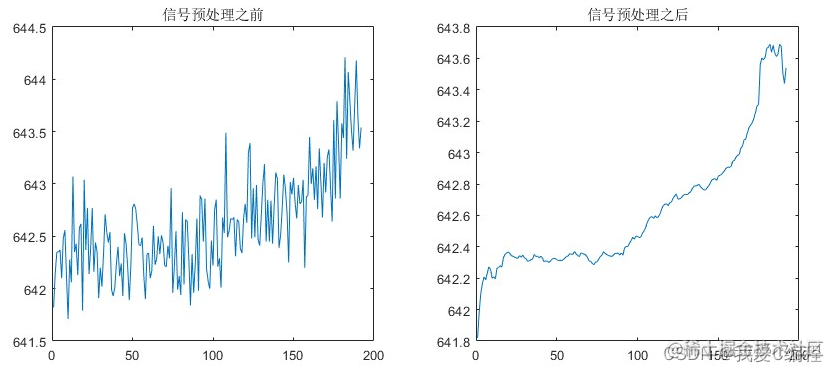
%平滑预处理
used = [7,8,9,12,13,14,16,17,18];
tmps = Data_Train(Index,used);
[R,C] = size(tmps);
dout = zeros(R,C);
for mm = 1:C
dout(:,mm) = [func_smooth(tmps(:,mm),32)]';
end
Mach_Info{i} = dout;
RUL_Train(i) = length(Index);
end
figure;
subplot(121);
plot(Data_Train(find(Data_Train(:,1) == 1),7));
title('信号预处理之前');
subplot(122);
plot(Mach_Info{1}(:,1));
title('信号预处理之后');
%%
%Step3
%特征提取
P = [];
T = [];
for i = 1:length(Mach_No)
tmps = Mach_Info{i};
%提取当前矩阵的特征
Y = func_pca(tmps',1);
Y = Y';
for j = 1:length(Y)
P = [P;Mach_Info{i}(j,1:6),Y(j,:)];
T = [T;(RUL_Train(i)-j)];
end
end
%%
%Step4
%使用神经网络进行训练
%%归一化处理
%对pt矩阵进行归一化处理
%GRNN网络训练
net = newgrnn(P',T',5.1);
save train_net.mat net

 浙公网安备 33010602011771号
浙公网安备 33010602011771号