m基于matlab的GPS卫星信号捕获和数据解析仿真
1.算法描述
全球定位系统(gps)是一种全天候、全球覆盖、高精度、自动化的卫星导航定位系统,该系统向有适当接收设备的全球范围用户提供精确、连续的三维位置和速度信息。gps自投入运行以来,已经发展成为一个涵盖各领域的服务系统。

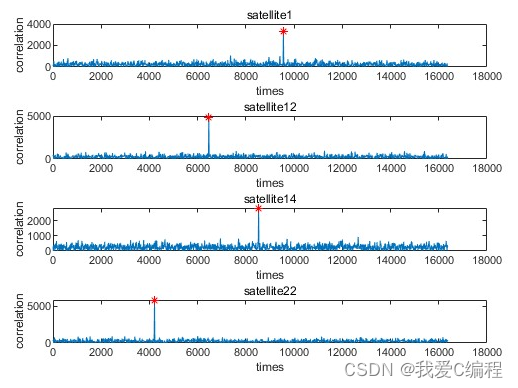
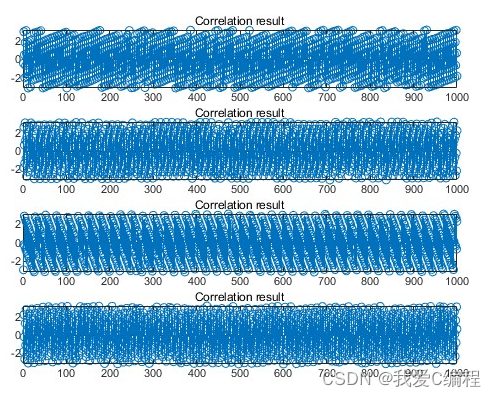
卫星信号的捕获算法是卫星定位接收机的关键,传统的捕获算法通常采用基于fft的相干积分和非相干积分相结合的方法,例如在使用gps信号进行定位和导航前首先需要对卫星信号进行捕获,gps卫星信号的传统捕获算法一般为频域并行捕获算法,频域并行捕获算法的原理框图如图3所示,频域并行捕获算法是一种基于fft的捕获算法,搜索覆盖全部搜索频点和全部伪码序列,对于正常功率的gps信号,通常只需要处理lms的导航数据,就能够完成gps信号的捕获,但是对于gps弱信号而言,通常处理lms的导航数据所获得的判决量并不可靠,难以实现捕获,此时就需要通过增加捕获算法所用的数据长度,采用相关积分和非相关积分相结合的方法,来提高捕获灵敏度,但同时导致fft相关运算的计算量将成倍增长,从而造成捕获速度降低。
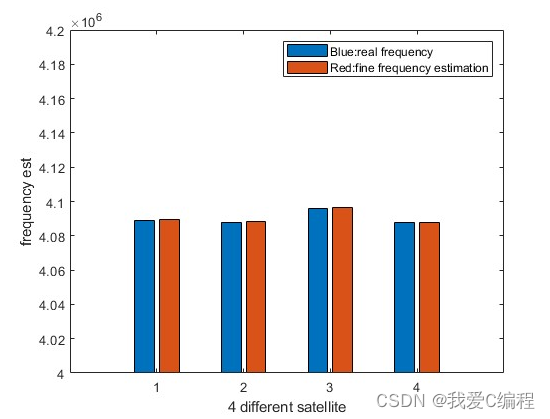
为了跟踪和解码GPS信号,首先要捕获到GPS信号。将捕获到的GPS信号的必要参数立刻传递给跟踪过程,再通过跟踪过程便可得到卫星的导航电文。GPS卫星处于高速运动中,因此,其频率会产生多普勒频移。载波频率与C/A码的多普勒频移将在下面详细讲述。
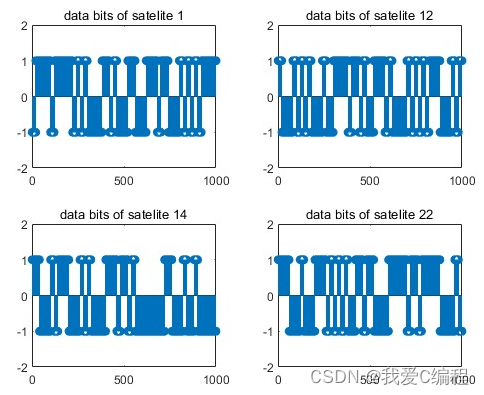
GPS卫星发送的信号一般由3个分量组成:载波、伪码和导航电文,其中伪码和导航电文采用BPSK技术去调制载波。
为了跟踪和解码GPS信号,首先要捕获到GPS信号。将捕获到的GPS信号的数据传递给跟踪过程,再通过跟踪过程便可得到卫星的导航电文。传统的GPS捕获方法有:串行搜索捕获、滑动相关法、循环相关法、PMF算法。
GPS卫星信号是发生在两个L波段频率的载波信号L1和L2,两个载波频率分别是L1的主频率fL1和L2的次频率fL2。在L波段进行调制可以避免拥挤,因为L波段的频率占据使用比率和其他波段相比要低一些,有助于全球性观测;L波段上更容易进行扩频(将低比特率的电文转换成高比特率的组合码,有利于卫星信号的保密性),发送宽带信号;L波段大气偏差和电离偏差小,接收设备可以更简单、更经济地接收和测量。每一颗卫星均有唯一的扩频码或伪随机序列,由此调制出载波频率。
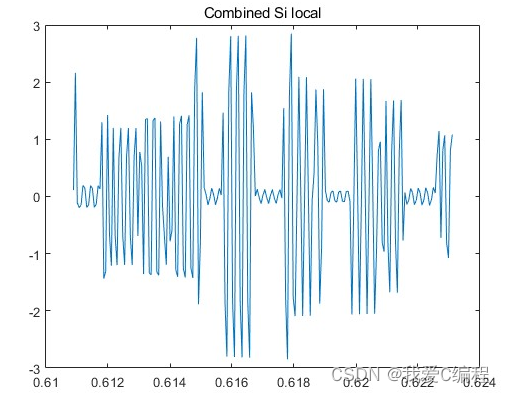
2.仿真效果预览
matlab2022a仿真结果如下:
3.MATLAB核心程序
clc;
clear;
close all;
warning off;
addpath(genpath(pwd));
rng('default')
%%
%11111111111111111111111111111111111111111111111111111111111
isnoise = 0;%1:add noise;0 good signal
%nosie awgn
SNR = -19;
%Q1
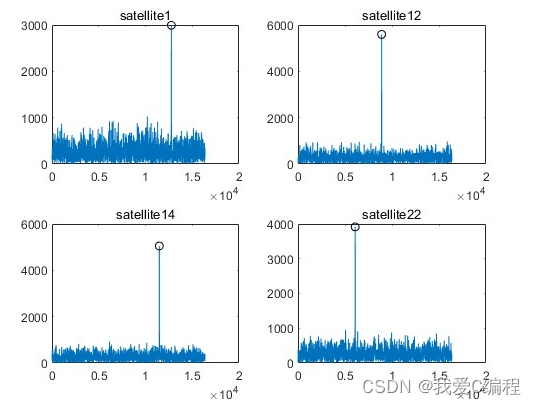
satellite = [1,12,14,22];
satellitenumber = length(satellite);
fs = 16.368e6; %sampling freq
IF = 4.092e6;%centered
fIFD = IF + 5e3 - 10e3*rand(1,satellitenumber);%no more than 5 KHz in absolute value
Fai = 2*pi*rand(1,satellitenumber);%random values
Ai = 0.7+0.3*rand(1,satellitenumber);%random between 1 and 0.7 for different satellites
taoi = floor(4e5*rand(1,satellitenumber)) + 2e5; %random between 1 and
Dur = 20;%bit duration,20ms
Len = 50;%data bit length,1s
%
CHIP_TIME = 977.5e-9; % chip time in seconds
ts = 1/fs;
n = fs/1000;
nn = [0:n-1];
millisecond = 1000;
x_bound = (ts/2)/CHIP_TIME; % Maximum offset
d_samp = 6; % sample offset between correlators
d = (d_samp*ts)/CHIP_TIME;
msSamp = 16368;
for i = 1:satellitenumber
i
%C
%1ms with 16 samples
code0 = digitizg(fs/1000,fs,0,satellite(i));
%20ms
code1 = [code0,code0,code0,code0,code0,code0,code0,code0,code0,code0,code0,code0,code0,code0,code0,code0,code0,code0,code0,code0];
%len
CA = [];
for j = 1:Len
CA = [CA,code1];
end
%D
Di0 = 2*double(rand(1,Len)>=0.5)-1;
%output the data
for j = 1:Len
Dout2{i}(Dur*(j-1)+1:Dur*j) = Di0(j);
end
for j = 1:length(Dout2{i})
Di2(length(code0)*(j-1)+1:length(code0)*j) = Dout2{i}(j);
end
%S
signal0 = Ai(i).*CA.*Di2;
%16times
%delay taoi/61
delays = floor(taoi(i)/61);
signal3 = [zeros(1,delays),signal0(1:end-delays)];
%carrier
t = 0:1/fs:(length(signal3)-1)/fs;
carrier{i} = cos(2*pi*fIFD(i)*t+Fai(i));
Si0{i} = signal3.*carrier{i};
end

 浙公网安备 33010602011771号
浙公网安备 33010602011771号