基于蚁群算法的二维路径规划matlab仿真
1.算法描述
蚁群算法是一种用来寻找优化路径的概率型算法。它由Marco Dorigo于1992年在他的博士论文中提出,其灵感来源于蚂蚁在寻找食物过程中发现路径的行为。这种算法具有分布计算、信息正反馈和启发式搜索的特征,本质上是进化算法中的一种启发式全局优化算法。
蚁群系统(Ant System或Ant Colony System)是由意大利学者Dorigo、Maniezzo等人于20世纪90年代首先提出来的。他们在研究蚂蚁觅食的过程中,发现单个蚂蚁的行为比较简单,但是蚁群整体却可以体现一些智能的行为。例如蚁群可以在不同的环境下,寻找最短到达食物源的路径。这是因为蚁群内的蚂蚁可以通过某种信息机制实现信息的传递。后又经进一步研究发现,蚂蚁会在其经过的路径上释放一种可以称之为“信息素”的物质,蚁群内的蚂蚁对“信息素”具有感知能力,它们会沿着“信息素”浓度较高路径行走,而每只路过的蚂蚁都会在路上留下“信息素”,这就形成一种类似正反馈的机制,这样经过一段时间后,整个蚁群就会沿着最短路径到达食物源了。
蚂蚁找到最短路径要归功于信息素和环境,假设有两条路可从蚁窝通向食物,开始时两条路上的蚂蚁数量差不多:当蚂蚁到达终点之后会立即返回,距离短的路上的蚂蚁往返一次时间短,重复频率快,在单位时间里往返蚂蚁的数目就多,留下的信息素也多,会吸引更多蚂蚁过来,会留下更多信息素。而距离长的路正相反,因此越来越多的蚂蚁聚集到最短路径上来。
蚂蚁具有的智能行为得益于其简单行为规则,该规则让其具有多样性和正反馈。在觅食时,多样性使蚂蚁不会走进死胡同而无限循环,是一种创新能力;正反馈使优良信息保存下来,是一种学习强化能力。两者的巧妙结合使智能行为涌现,如果多样性过剩,系统过于活跃,会导致过多的随机运动,陷入混沌状态;如果多样性不够,正反馈过强,会导致僵化,当环境变化时蚁群不能相应调整。
将各个蚂蚁随即放置在不同的出发地,对于每个蚂蚁k( k属于1到m),计算下一个待访问城市,直至每个蚂蚁都访问完所有城市。蚂蚁在构建路径的每一步中,采用轮盘赌法选择下一要到达的城市。选择每一个路径的概率表示为:
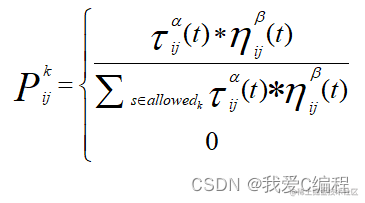
信息素更新的表达式为:

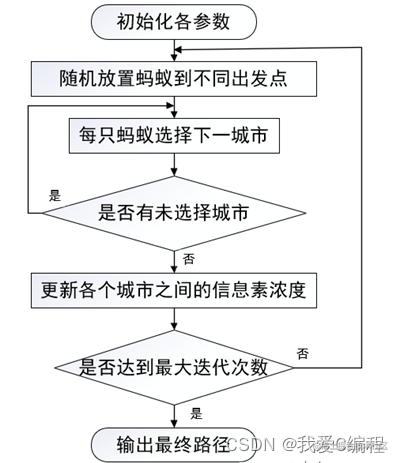
蚁群算法具体流程如图1示。
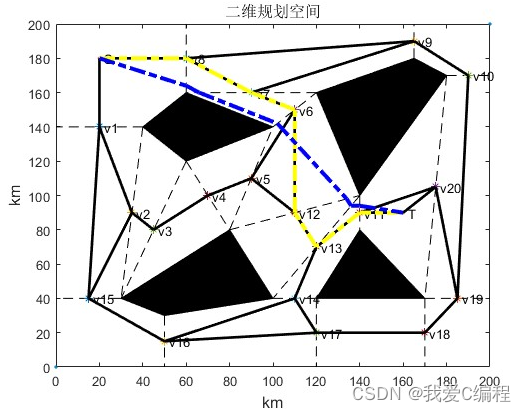
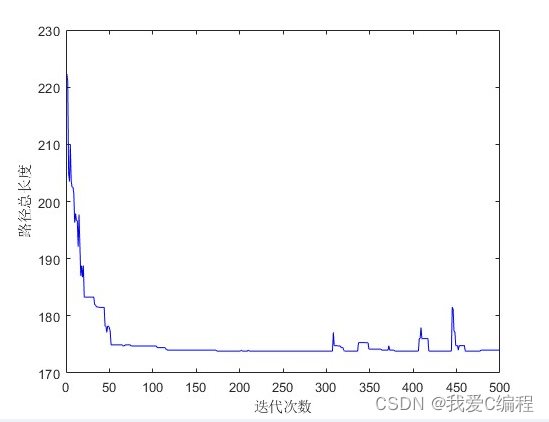
2.仿真效果预览
matlab2022a仿真结果如下:
3.MATLAB核心程序
%% 障碍物数据
position = load('barrier.txt');
plot([0,200],[0,200],'.');
hold on
B = load('barrier.txt');
xlabel('km','fontsize',12)
ylabel('km','fontsize',12)
title('二维规划空间','fontsize',12)
%% 描述起点和终点
S = [20,180];
T = [160,90];
plot([S(1),T(1)],[S(2),T(2)],'.');
% 图形标注
text(S(1)+2,S(2),'S');
text(T(1)+2,T(2),'T');
%% 描绘障碍物图形
fill(position(1:4,1),position(1:4,2),[0,0,0]);
fill(position(5:8,1),position(5:8,2),[0,0,0]);
fill(position(9:12,1),position(9:12,2),[0,0,0]);
fill(position(13:15,1),position(13:15,2),[0,0,0]);
% 下载链路端点数据
L = load('lines.txt');
%% 描绘线及中点
v = zeros(size(L));
for i=1:20
plot([position(L(i,1),1),position(L(i,2),1)],[position(L(i,1),2)...
,position(L(i,2),2)],'color','black','LineStyle','--');
v(i,:) = (position(L(i,1),:)+position(L(i,2),:))/2;
plot(v(i,1),v(i,2),'*');
text(v(i,1)+2,v(i,2),strcat('v',num2str(i)));
end
%% 描绘可行路径
sign = load('matrix.txt');
[n,m]=size(sign);
for i=1:n
if i == 1
for k=1:m-1
if sign(i,k) == 1
plot([S(1),v(k-1,1)],[S(2),v(k-1,2)],'color',...
'black','Linewidth',2,'LineStyle','-');
end
end
continue;
end
for j=2:i
if i == m
if sign(i,j) == 1
plot([T(1),v(j-1,1)],[T(2),v(j-1,2)],'color',...
'black','Linewidth',2,'LineStyle','-');
end
else
if sign(i,j) == 1
plot([v(i-1,1),v(j-1,1)],[v(i-1,2),v(j-1,2)],...
'color','black','Linewidth',2,'LineStyle','-');
end
end
end
end
path = DijkstraPlan(position,sign);
j = path(22);
plot([T(1),v(j-1,1)],[T(2),v(j-1,2)],'color','yellow','LineWidth',3,'LineStyle','-.');
i = path(22);
j = path(i);
count = 0;
while true
plot([v(i-1,1),v(j-1,1)],[v(i-1,2),v(j-1,2)],'color','yellow','LineWidth',3,'LineStyle','-.');
count = count + 1;
i = j;
j = path(i);
if i == 1 || j==1
break;
end
end

 浙公网安备 33010602011771号
浙公网安备 33010602011771号