m基于PSO粒子群优化的柔性作业车间调度问题matlab仿真,并输出甘特图
1.算法描述
PSO算法是一种随机的、并行的优化算法。它的优点是:不要求被优化函数具有可微、可导、连续等性质,收敛速度较快,算法简单,容易编程实现。然而,PSO算法的缺点在于:(1)对于有多个局部极值点的函数,容易陷入到局部极值点中,得不到正确的结果。造成这种现象的原因有两种,其一是由于待优化函数的性质;其二是由于微粒群算法中微粒的多样性迅速消失,造成早熟收敛。这两个因素通常密不可分地纠缠在一起。(2)由于缺乏精密搜索方法的配合,PSO算法往往不能得到精确的结果。造成这种问题的原因是PSO算法并没有很充分地利用计算过程中获得的信息,在每一步迭代中,仅仅利用了群体最优和个体最优的信息。(3)PSO算法虽然提供了全局搜索的可能,但是并不能保证收敛到全局最优点上。(4)PSO算法是一种启发式的仿生优化算法,当前还没有严格的理论基础,仅仅是通过对某种群体搜索现象的简化模拟而设计的,但并没有从原理上说明这种算法为什么有效,以及它适用的范围。因此,PSO算法一般适用于一类高维的、存在多个局部极值点而并不需要得到很高精度解的优化问题。
当前针对PSO算法开展的研究工作种类繁多,经归纳整理分为如下八个大类:(1)对PSO算法进行理论分析,试图理解其工作机理;(2)改变PSO算法的结构,试图获得性能更好的算法;(3)研究各种参数配置对PSO算法的影响;(4)研究各种拓扑结构对PSO算法的影响;(5)研究离散版本的PSO算法;(6)研究PSO算法的并行算法;(7)利用PSO算法对多种情况下的优化问题进行求解;(8)将PSO算法应用到各个不同的工程领域。以下从这八大类别着手,对PSO算法的研究现状作一梳理。由于文献太多,无法面面俱到,仅捡有代表性的加以综述。
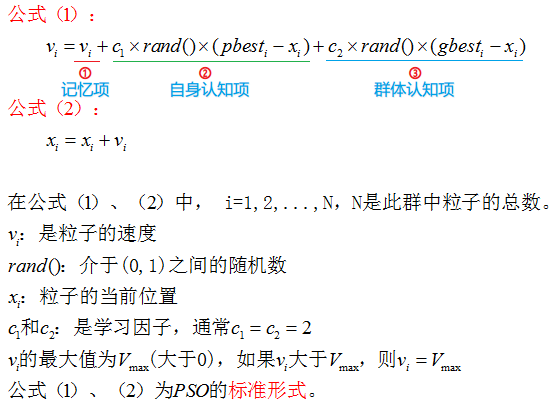
PSO初始化为一群随机粒子(随机解)。然后通过迭代找到最优解。在每一次迭代中,粒子通过跟踪两个“极值(pbest和gbest)”来更新自己。在找到这两个最优值后,粒子通过下面的公式来更新自己的速度和位置。
标准PSO算法流程
初始化一群微粒(群体规模为N),包括随机位置和速度;
评价每个微粒的适应度;
对每个微粒,将其适应值与其经过的最好位置pbest作比较,如果较好,则将其作为当前的最好位置pbest;
对每个微粒,将其适应值与其经过的最好位置gbest作比较,如果较好,则将其作为当前的最好位置gbest;
根据公式(2)、(3)调整微粒的速度和位置;
未达到结束条件则转到第二步。
迭代终止条件根据具体问题一般选为最大迭代次数Gk或微粒群迄今为止搜索到的最优位置满足预定最小适应阈值。
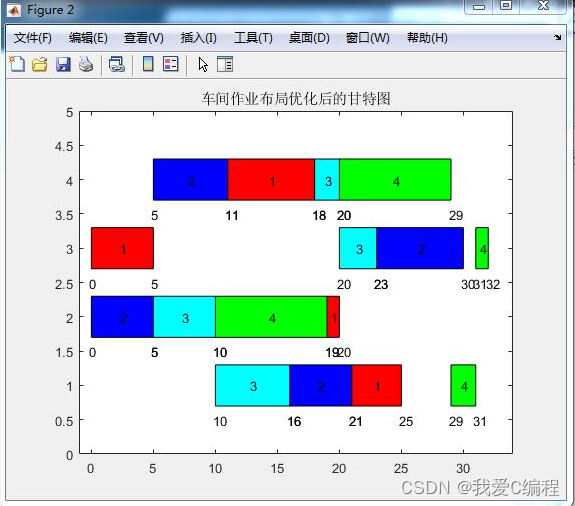
甘特图以图示通过活动列表和时间刻度表示出特定项目的顺序与持续时间。一条线条图,横轴表示时间,纵轴表示项目,线条表示期间计划和实际完成情况。直观表明计划何时进行,进展与要求的对比。便于管理者弄清项目的剩余任务,评估工作进度。
甘特图是以作业排序为目的,将活动与时间联系起来的最早尝试的工具之一,帮助企业描述工作中心、超时工作等资源的使用。
甘特图包含以下三个含义:
1、以图形或表格的形式显示活动;
2、通用的显示进度的方法;
3、构造时含日历天和持续时间,不将周末节假算在进度内。
简单、醒目、便于编制,在管理中广泛应用。
甘特图按内容不同,分为计划图表、负荷图表、机器闲置图表、人员闲置图表和进度表五种形式。
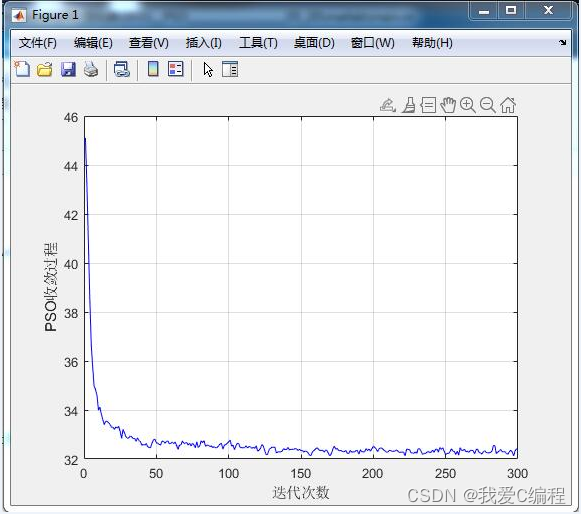
2.仿真效果预览
matlab2022a仿真结果如下:
3.MATLAB核心程序
.................................................
wmax = 1.2;
wmin = 0.1;
c1 = 1.5;
c2 = 2;
%粒子群规模
Pso_Num = 100;
%迭代次数
Max_Gen = 300;
%同一个工序下的作业数量
Job_num = 4;
%不同工序的数量
Job_para= 4;
%初始PSO变量
Time_job = zeros(Job_num,Job_para);
seqs_job = zeros(Job_num,Job_para);
rng(1);
%初始化PSO变量的随机赋初值
for ii = 1:Job_num
for jj = 1:Job_para
Time_job(ii,jj) = round(1+9*rand);
end
seqs_job(ii,:) = randperm(Job_para);
end
%总工序
All_Num = Job_num*Job_para;
%粒子初始化
Part_initial = rand(Pso_Num,All_Num+1);
%速度初始化
Vpso = rand(Pso_Num,All_Num);
%初始化车间作业布局
for i=1:Pso_Num
[K1,K2] = sort(Part_initial(i,1:All_Num));
Arrays = ceil(K2/Job_para);
Span_initial = func_span(Arrays,Time_job,seqs_job);
Part_initial(i,All_Num+1)= Span_initial;
end
%个体
Pbestp = zeros(Pso_Num,All_Num);
Pbestg = zeros(1,All_Num);
%速度
Vbestp = zeros(Pso_Num,1);
Vbestg = zeros(1,1);
%初始化粒子群的初始状态
for i=1:Pso_Num
Pbestp(i,1:All_Num) = Part_initial(i,1:All_Num);
Vbestp(i) = Part_initial(i,All_Num+1);
end
%初始化粒子群速度和坐标
[I,J] = sort(Part_initial(:,All_Num+1));
Pbestg = Part_initial(J(1),1:All_Num);
Vbestg = Part_initial(J(1),All_Num+1);
iter = 0;
E0 = zeros(1,Pso_Num);
E1 = zeros(1,Max_Gen);
%粒子群权值
w = 0.5;
%开始迭代
while iter<Max_Gen
iter
for i = 1:Pso_Num%对每个PSO个体进行循环处理
rng(i*iter);
%随机化系数
K1 = rand/4;
K2 = rand/4;
%PSO粒子群自适应迭代公式
Vpso(i,:) = w*Vpso(i,:)+...
c1*K1*(Pbestp(i,:) - Part_initial(i,1:All_Num))+...
c2*K2*(Pbestg - Part_initial(i,1:All_Num));
%将更新后的PSO状态叠加到粒子群初始状态上,并逐渐迭代到最优状态
Part_initial(i,1:All_Num) = Part_initial(i,1:All_Num) + Vpso(i,:);
%估计
[Value_g,Index_g] = sort(Part_initial(i,1:All_Num));
Arrays = ceil(Index_g/Job_para);
%将每次迭代后的PSO状态进行优化作业布局
Span_initial = func_span(Arrays,Time_job,seqs_job);
Part_initial(i,All_Num+1) = Span_initial;
%将较优的PSO状态和速度更新到变量Pbestp和Vbestp中
if Part_initial(i,All_Num+1) < Vbestp(i)
Pbestp(i,:) = Part_initial(i,1:All_Num);
Vbestp(i) = Part_initial(i,1+All_Num);
end
if Vbestp(i) < Vbestg
Pbestg = Pbestp(i,:);
Vbestg = Vbestp(i);
end
E0(i) = Span_initial;
end
iter=iter+1;
E1(iter) = mean(E0);
end
................................................
figure;
[Rows,Cols] = size(Time_s);
for i=1:Rows
for j=1:Cols
%根据得到的时间点进行划分
x = [Time_s(i,j),Time_s(i,j),Time_e(i,j),Time_e(i,j)];
y = [Rows+1-i-0.3,Rows+1-i+0.3,Rows+1-i+0.3,Rows+1-i-0.3];
%不同的工序进行标注不同的颜色
if Job_sech(i,j) == 1
fill(x,y,'r');
end
if Job_sech(i,j) == 2
fill(x,y,'b');
end
if Job_sech(i,j) == 3
fill(x,y,'c');
end
if Job_sech(i,j) == 4
fill(x,y,'g');
end
%标记工序的编号
Name_jobs = strcat(int2str(Job_sech(i,j)));
Name_start = strcat(int2str(Time_s(i,j)));
Name_end = strcat(int2str(Time_e(i,j)));
text((Time_s(i,j)+Time_e(i,j))/2-0.2,Rows+1-i,Name_jobs);
text(Time_s(i,j)-0.2,Rows+1-i-0.5,Name_start);
text(Time_e(i,j)-0.2,Rows+1-i-0.5,Name_end);
hold on
end
end
axis([-1,max(max(Time_e))+2,0,Job_para+1]);
title('车间作业布局优化后的甘特图');
02_031m

 浙公网安备 33010602011771号
浙公网安备 33010602011771号