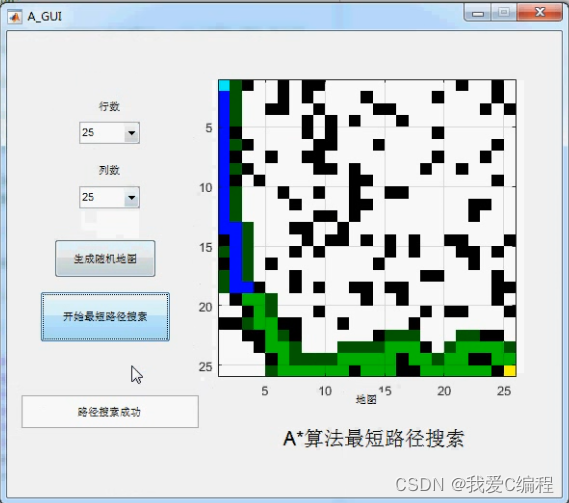
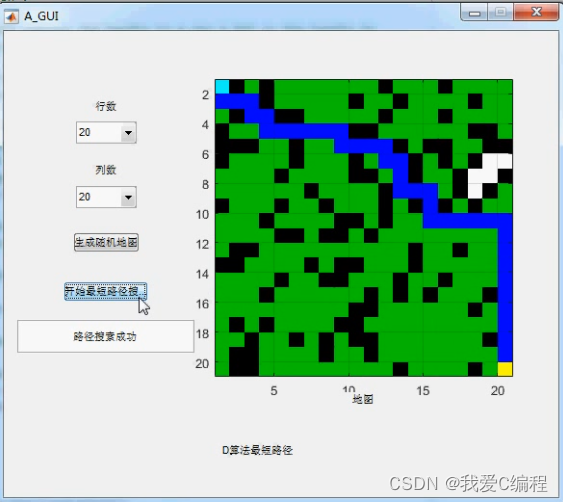
基于A星和dijkstra算法的障碍物规避matlab仿真,可以设置行列数,随机产生障碍物
1.算法概述
Dijkstra(迪杰斯特拉)算法是典型的最短路径路由算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止(BFS、prime算法都有类似思想)。Dijkstra算法能得出最短路径的最优解,但由于它遍历计算的节点很多,所以效率低。
算法描述
(1)S为已经找到的从v出发的最短路径的终点集合,它的初始状态为空集,将源点加入S中。 其余顶点构成集合U。
(2)构建源点到其余顶点的距离列表,与源点不相连的顶点距离记为∞。
(3)广度遍历与源点相连的顶点,找到距离最近的顶点,则到这个顶点的最短路径就确定了,最短距离就是当前距离,将这个顶点从U中拿出,放入S中。
(4)用当前的顶点作为中间点,对其进行广度遍历,对遍历到的顶点距离进行更新。
(5)在U中搜索最短距离的顶点,将其放入S。
(6)以这个节点作为中间点广度搜索,更新距离。
(7)重复这个过程,直至U为空。
2.仿真效果预览
matlab2022a仿真结果如下:
3.MATLAB程序
cmap = [1 1 1; ...% 1 -白色-无障碍
0 0 0; ...% 2 -黑色-有障碍
0 0.8 0; ...% 3 -绿色-已搜索
0 0.4 0; ...% 4 -粉色-正在搜索
0 1 1; ...% 5 -浅蓝色-起始点
1 1 0; ...% 6 -黄色-目标点
0 0 1]; % 7 -蓝色-最终路径
colormap(cmap);
%生成随机地图
map = zeros(n_r,n_c);
randmap = rand(n_r,n_c);
for i = 2:(sub2ind(size(randmap),n_r,n_c)-1)
if (randmap(i) >= 0.75)
map(i) = 2;
end
end
map(1, 1) = 5; % start_coords 起点坐标
map(n_r, n_c) = 6; % dest_coords 终点坐标
image(1.5,1.5,map);
grid on;
axis image;
set(handles.text5,'string','随机地图生成完毕');
% --- Executes on button press in pushbutton2.
function pushbutton2_Callback(hObject, eventdata, handles)
% hObject handle to pushbutton2 (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
%搜索最佳路径
global n_r;
global n_c;
global cmap;
global map;
global state;
nrows = n_r;
ncols = n_c;
start_node = sub2ind(size(map), 1, 1);
%sub2ind()函数将矩阵中的某个元素的线性序号计算出来
%线性索引号例子:2*2矩阵[1 3;中,1是第一个,5是第二个
% 5 7] ,3是第三个,7是第四个
%(matlab是列优先,不是我们通常习惯的行优先)
dest_node = sub2ind(size(map), n_r, n_c);
% Initialize distance array 初始化距离数组
distanceFromStart = Inf(nrows,ncols);
distanceFromStart(start_node) = 0 ;
% For each grid cell this array holds the index of its parent 对于每个网格单元,该数组都保存其父单元的索引
parent = zeros(nrows,ncols);
% Main Loop
while true
% Draw current map
map(start_node) = 5;
map(dest_node) = 6;
image(1.5, 1.5, map);
grid on; %网格
axis image; %显示坐标
drawnow; %刷新屏幕
% Find the node with the minimum distance 找到距离最短的节点
[min_dist, current] = min(distanceFromStart(:));
if ((current == dest_node) || isinf(min_dist)) %TF = isinf(A) 返回一个和A尺寸一样的数组, 如果A中某个元素是inf (无穷), 则对应TF中元素是1, 否则TF中对应元素是0。
break;
end;
%搜索中心的索引坐标:current,
%搜索中心与起始点的路程:min_dist
% 这两个值后面会用。
map(current) = 3;
distanceFromStart(current) = Inf;
[i, j] = ind2sub(size(distanceFromStart), current); %索引号变为坐标
neighbor = [i-1,j;
i+1,j;
i,j+1;
i,j-1];
outRangetest = (neighbor(:,1)<1) + (neighbor(:,1)>nrows)+(neighbor(:,2)<1) + (neighbor(:,2)>ncols);
locate = find(outRangetest>0); %返回outRangetest中大于0的元素的相对应的线性索引值。
neighbor(locate,:)=[];
neighborIndex = sub2ind(size(map),neighbor(:,1),neighbor(:,2));
for i=1:length(neighborIndex)
if (map(neighborIndex(i))~=2) && (map(neighborIndex(i))~=3 && map(neighborIndex(i))~= 5)
map(neighborIndex(i)) = 4;
if (distanceFromStart(neighborIndex(i))>= min_dist + 1 )
distanceFromStart(neighborIndex(i)) = min_dist+1;
parent(neighborIndex(i)) = current;
% pause(0.02);
end
end
end
end
A_001

 浙公网安备 33010602011771号
浙公网安备 33010602011771号