基于simulink的转速反馈单闭环直流调速系统
1.算法概述
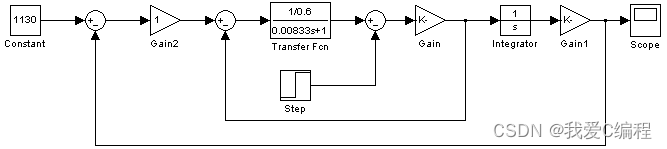
仿真模型图为:
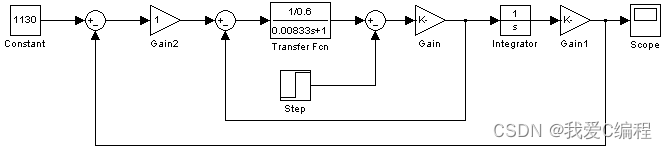

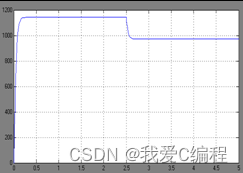
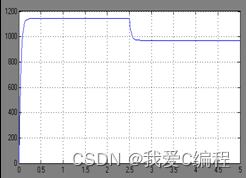
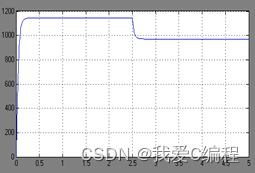
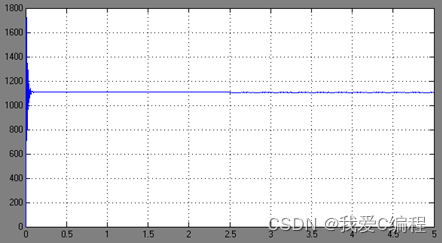
2.仿真效果预览
matlab2022a仿真结果如下:
①ode23
②ode113

③ode15s

④ode23s
⑤ode23t
⑥ode23tb

①Kp=0.5
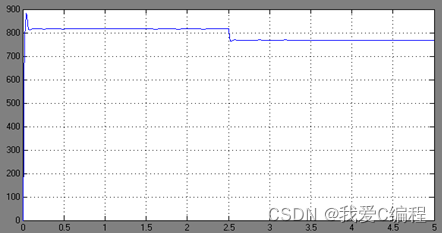
空载转速n=816r/min,稳态时转速n=768r/min,静差率s=5.88%
②Kp=1
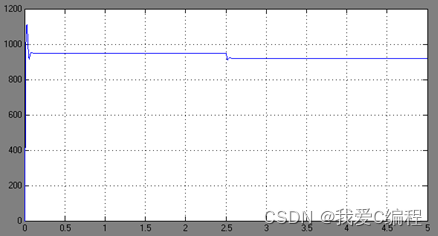
空载转速n=948r/min,稳态时转速n=920r/min,静差率s=2.95%
③Kp=2
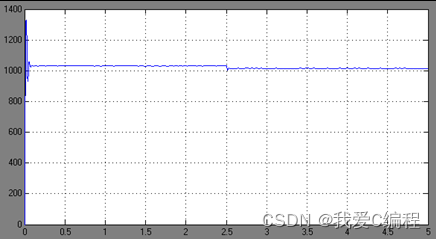
空载转速n=1030r/min,稳态时转速n=1016r/min,静差率s=1.36%
④Kp=4
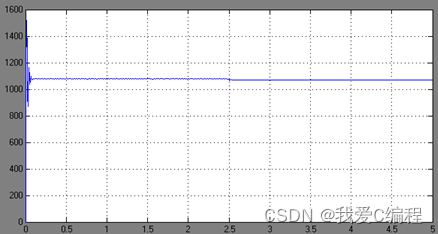
空载转速n=1078r/min,稳态时转速n=1070r/min,静差率s=0.74%
⑤Kp=10
空载转速n=1110r/min,稳态时转速n=1105r/min,静差率s=0.45%
闭环反馈控制系统是按被调量的偏差进行控制的系统,只要被调量出现偏差,它就会自动产生纠正偏差的作用。而转速降落正是由负载引起的转速偏差,显然,闭环调速系统应该能大大减少转速降落。
(1)控制器为比例环节时
由实验波形可知,Kp值越大,稳定后的转速n就越大,超调量也越大,静差率s则越小。静差率s反映的是闭环反馈效果,s越小,闭环反馈效果则越好,即Kp值越大,闭环反馈效果则越好。在实际中,我们希望得到的是超调量小(即希望Kp小)和闭环反馈效果好(即希望Kp大)的系统,但是这二者却是相互矛盾的,我们只能从中选取一组最优平衡值,使得在较小超调量和较好反馈控制下系统能够最大限度的最好工作。
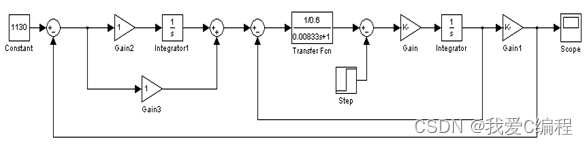
(2)控制器为比例积分环节时
超调量和响应时间受Kp、Ki共同控制,在相同Kp下,Ki越大,上升速度越快,响应时间越短,超调量越大;在相同Ki下, Kp越大,上升速度越快,响应时间越短,超调量越大。即Kp*Ki的值越大,上升速度越快,响应时间越短,但是超调量越大(Kp小于1时无超调量)。
静差率在仿真时间内为0,即实现了无静差调速系统。
当Kp取一定值时,Ki的值在增大到一定程度时,会产生振荡发散现象。
比较开环系统与闭环系统知,开环调速系统受到外界的干扰信号影响较闭环调速系统大;闭环系统的静差率比开环系统的小,且带比例放大器的反馈控制闭环调速系统是有静差的调速系统,而采用比例积分调节器的闭环调速系统则基本上实现了无静差调速,闭环反馈效果较好。
3.MATLAB部分代码预览
matlab2022a仿真结果如下:
仿真模型图为:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号