m低信噪比下GPS信号的捕获算法研究,使用matlab算法进行仿真
1.算法概述
GPS系统的星座部分是由21颗工作卫星和3颗在轨备用卫星组成,其高度为20183km,这24颗卫星均匀分布在6个等间隔的、相对轨道面倾角为55º的近圆轨道上。
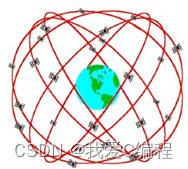
GPS卫星的轨道周期为半个恒星日,即11小时58分钟。从地球质心到卫星的额定距离为26600km,即轨道半径。每颗GPS工作卫星都发射用于导航定位的信号,然后GPS用户利用这些信号来进行工作的。这样的空间布局,可以保证在地球上的任意点、任意时刻均可同时观测到至少4颗卫星,最多时可以见到11颗,从而为全球用户提供24小时的导航定位功能。
GPS卫星发送的信号一般由3个分量组成:载波信号、伪码和导航电文。其中伪码和导航电文采用BPSK技术去调制载波。每个卫星数据代码中使用模2加法叠加在C/A和P码上,再调制到L1、L2载波上。正如已经提到的,载波信号涵盖L1载波和L2载波,所以测距码信号包括叠加在L2载波上的P码和L1载波上的P码、C/A。所有信号都是通过同一个基本频率的控制下产生的,如图2所示。
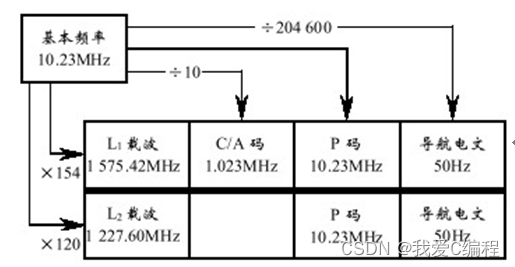
从图2可知,L1载波调制有P码、C/A码和数据码。而在L2载波上当前只有数据码和调制P码。拟议中的L5载波(第二民用频率)将会选择同时加载P码和C/A码,预计它的频率将会达到f5=115*f0=1175.45MHz,波长为=25.48cm。无论数据码还是测距码,是通过相位调制高频载波。也就是说,当代码值(调制信号)从1到0,或从0到1,会使载波相位变化180度。调制以后的卫星信号向用户播放是通过卫星发射天线。接收机的主要工作是重建载波来提取导航电文。信号解调中常用的2种方法:平方解调技术和复制代码相关技术。
GPS卫星所发播的信号包括载波信号(L1和L2)、测距信号(包括C/A码和P码)和导航信号(或称D码元)。其中测距信号是一种伪随机噪声码(PRN) 。
GPS使用的两个L波段两种载频:
选择L波段的好处是:
(1)减少拥挤,防止“撞车“现象发生。目前L波段的频率占用率要低于其他波段,对全球性的导航定位测量非常有利。
(2)自适应扩频,传输宽带信号。卫星扩频传输卫星导航电文,高频率约为20兆赫兹,在占用率较低的带宽。
(3)大气衰减较小,对研制用户设备有利。GPS卫星采用的是L波段,避免了大气的谐振吸收,衰减较小,而且电离层延迟的影响小,有利于接收设备测量GPS信号。
而在接收端,其结构如图1所示,它是利用前段射频硬件的采集模板将 GPS信号采集转化成中频数字信号再进行后续信号处理,从而得到信号定位等相关信息。软件接收机的实现由前段射频模块的质量和性能去决定。
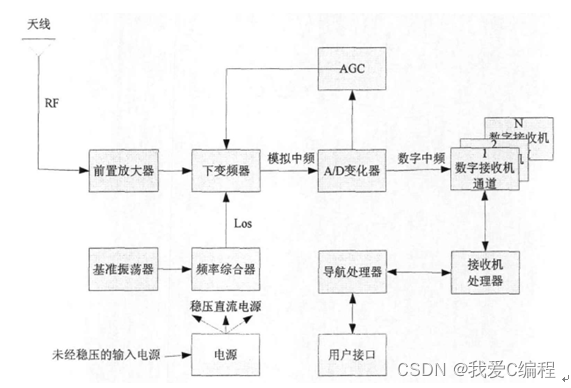
软件接收机主要是由两个模块组成:信号数据处理软件模块和前端信号采集硬件电路模块。软件模块细分为捕获与跟踪,星历解码与PVT估计。软件接收机系统的主线是GPS数据流的处理过程,前端以数据采集为主,在后端的设计集中于信号处理的软件编程与实现,因此,在可以采集准确的GPS数据的前提下,后端设计为软件接收机给予了很大的灵活性,为新算法的验证评估和测试提供一个有效的、便捷的服务平台。硬件模块细分则为天线,A/D转换模块,降频模块,数据采集存贮模块和串并行模块。
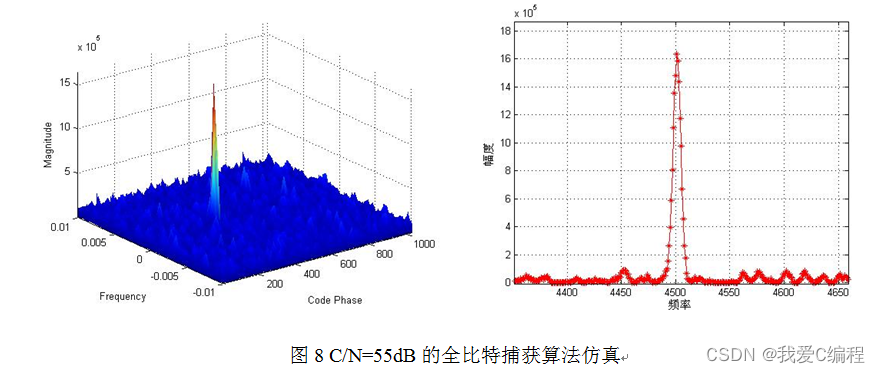
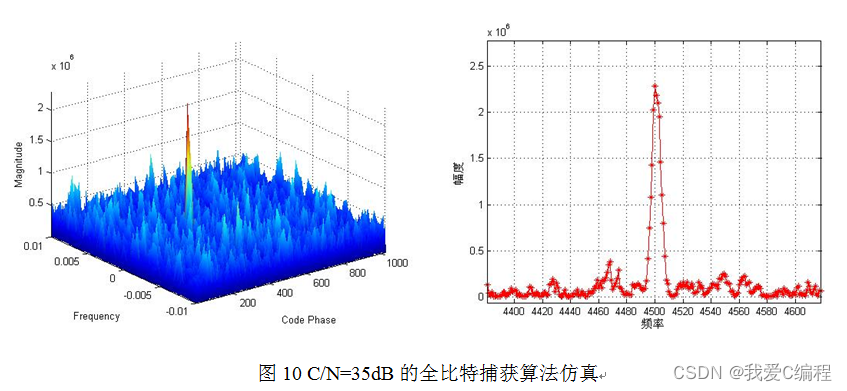
通常情况下,由于输入信号的C/A码的起始位置是未知的,所以在进行捕获之前,波形实现产生一个伪随机码,这里假设将接收到的模拟信号数字化为5000个点,然后与输入的信号在数字域进行相乘,将相乘得到的结果进行快速傅里叶变换,从而得到其频率。通过上一节的讨论,FFT之后的频率分量为前半部分的2500个频率分量,将输出的频率分量的幅度与设置的门限值进行比较,如果幅度值大于门限值,那么该频率分量就是所需要的期望值。通过这种算法,就能够得到之前所说的起始点位置。
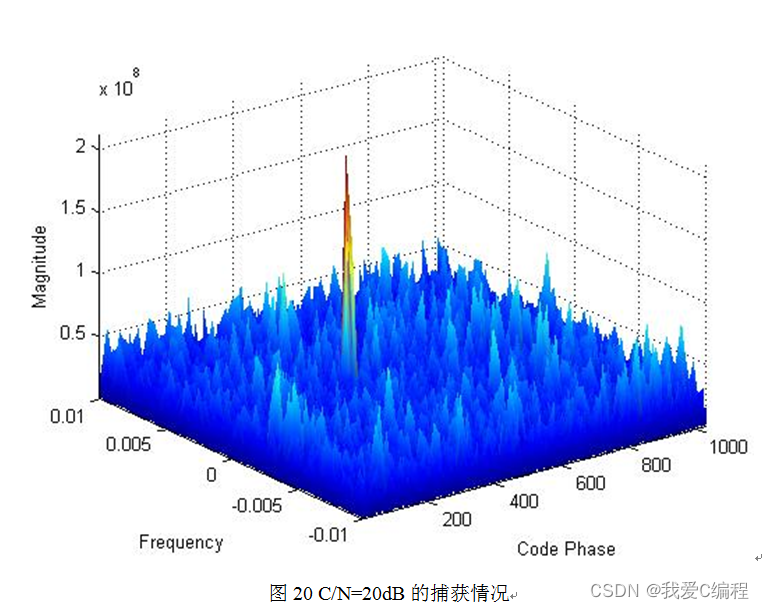
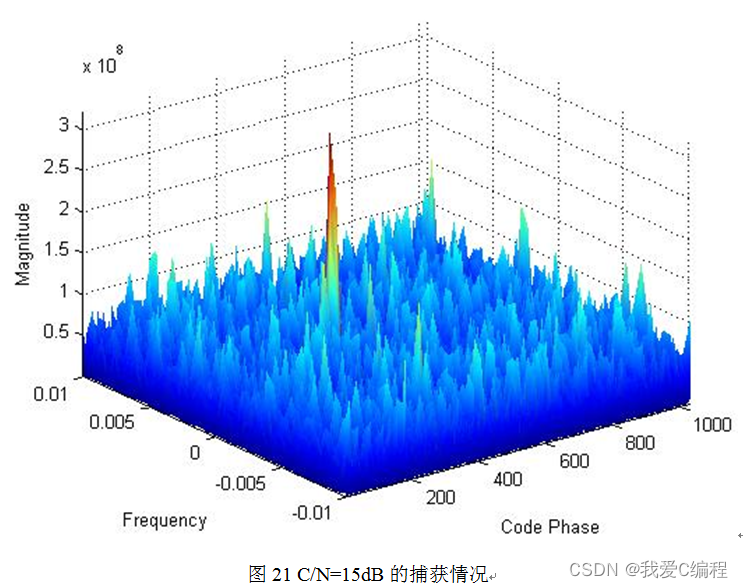
2.仿真效果预览
matlab2022a仿真
3.MATLAB部分代码预览
.........................................................................
%% step2:CA码的产生
load gold1.mat;
code=double(code(1,:));
figure;
plot(code,'r-*');
axis([0,length(code),-1.2*max(code),1.2*max(code)]);
title('采样化后的 CA 码');
%相关性
Xcor_code = xcorr(code,code);
figure
plot(Xcor_code,'b-o');
axis([0,length(Xcor_code),0,1.2*max(Xcor_code)]);
%% step3:GPS中频信号
load data.mat
x=double(data');
figure;
plot(x,'r-*');
axis([0,length(x),-1.2*max(x),1.2*max(x)]);
x2 = [x x x x x x x x x x];
%发送四段连续的信号;
LENS = length(x2);
s=0:LENS-1;
y=x2.*exp(j*2*pi*(fc+fdelta)/fs*s);
y=awgn(y,snr);
%% step4:GPS信号的捕获 分成4段捕获
CA_fre = conj(fft(code));
L2 = length(y)/N;
y1 = y(1:11999);
y2 = y(12000:23998);
y3 = y(23999:35997);
y4 = y(35998:47996);
y5 = y(47997:59995);
y6 = y(59996:71994);
y7 = y(71995:83993);
y8 = y(83994:95992);
y9 = y(95993:107991);
y10= y(107992:119990);
ys1 = y1+y2+y3+y4;
% ys2 = y1+y2+y3+y4+y5+y6+y7+y8+y9-y10;
% ys3 = y1+y2+y3+y4+y5+y6+y7+y8-y9-y10;
% ys4 = y1+y2+y3+y4+y5+y6+y7-y8-y9-y10;
% ys5 = y1+y2+y3+y4+y5+y6-y7-y8-y9-y10;
% ys6 = y1+y2+y3+y4+y5-y6-y7-y8-y9-y10;
% ys7 = y1+y2+y3+y4-y5-y6-y7-y8-y9-y10;
% ys8 = y1+y2+y3-y4-y5-y6-y7-y8-y9-y10;
% ys9 = y1+y2-y3-y4-y5-y6-y7-y8-y9-y10;
% ys10= y1-y2-y3-y4-y5-y6-y7-y8-y9-y10;
for i=1:2*Nstep+1
fc(i) = 0.0005e6*(i-Nstep-1); %搜索频率
expfreq = exp(j*2*pi*fc(i)*ts*nn);
Data_sin = imag(expfreq);
Data_cos = real(expfreq);
I = Data_sin.*ys1;
Q = Data_cos.*ys1;
IQfreq = fft(I+j*Q);
convIQ = IQfreq .* CA_fre;
peaks(i,:) = abs(ifft(convIQ)).^2;
end
[value_peak codephases]=max(max(peaks));
[value_peak frequencys]=max(max(peaks'));
frequency = fc(frequencys);%中心频率;
codephaseChips = round(1023 - (codephases/11999)*1023);%CA码相位
frequency
codephaseChips
close all;
figure
plot(peaks(frequencys,:),'r-*');
grid on
xlabel('频率');
ylabel('幅度');
%% step5:三围搜索结构
gold_rate = 1.023e6;
ts=1/fs;
tc=1/gold_rate;
b=[1:n];
c=ceil((ts*b)/tc);
01_036_m

 浙公网安备 33010602011771号
浙公网安备 33010602011771号