
从Bellman方程到派单算法(一)-- MDP
从MP到MRP再到MDP
MP
M = {S, P}
马尔科夫过程。后续的状态只与当前状态有关,与当前状态之前的状态无关。
MRP
M = {S, P, R, γ}
马尔科夫奖励过程。在马尔科夫过程的基础上增加了奖励R和衰减系数γ<0。
定义Gt为在此时刻到过程结束后所得到的收益。衰减系数体现了时间上的不确定性,离此时刻的状态越远,折扣的越多。
![]()
定义v(s)为状态s的价值函数。价值函数是Gt的期望,因为状态s是依照不同的概率转移到下一个状态的,所以不同的状态转移概率乘以对应状态的收益,得到的期望,就是我们要的价值函数。
![]()
价值函数可以拆解成如下形式:
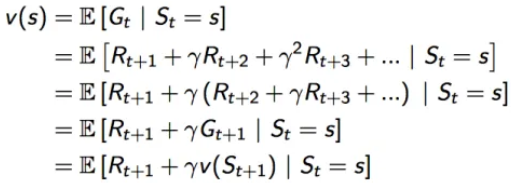
可以看成一个状态的价值 = 即时回报+下一状态的折扣价值。这里的Rt+1可以当做Rt,符号问题不用纠结,就当做即使回报就好。
如果知道了状态转移概率矩阵Pss',那么期望就可以进一步拆为
![]()
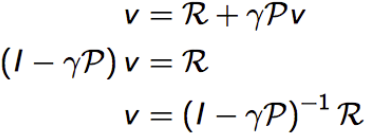
如果状态是有限且各个状态的即使回报、状态转移概率都是已知的,那么该式有解析解
![]()
MDP
M = {S, A, P, R, γ}
马尔科夫决策过程。在马尔科夫奖励过程的基础上增加了决策过程,也就是行动集A,且这里的P和R都与具体的行为a对应,而不像马尔科夫奖励过程那样仅对应于某个状态,a∈A。
既然引入了行动,必然会涉及到策略,这里用π表示策略(Policy)。含义是在状态s下,采取各个行动a的概率,记为π(a|s)。
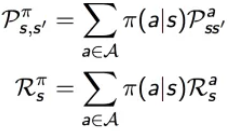
马尔科夫奖励过程(MRP),在执行策略π时,有如下的状态转移概率和奖励函数
由于行动a的加入,定义行为价值函数,记为qπ(s,a),表示在执行策略π时,对当前状态s执行某一具体行为a所能得到的收益的期望,也就是在状态s执行a的价值。
![]()
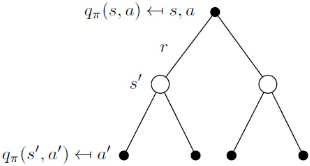
我们知道,状态s,采取了行动a,转移到了状态s',这其中的状态价值可以通过全部的行为价值求和计算得到,而行为价值,也可以通过全部的状态价值求和计算得到,可以写出以下公式
![]() 该状态的价值,等于该状态能采取的动作的动作价值之和
该状态的价值,等于该状态能采取的动作的动作价值之和
![]() 该动作的价值,等于该动作带来的即时收益,加上在该动作的作用下,能够转移到的所有的下一个状态的状态价值之和
该动作的价值,等于该动作带来的即时收益,加上在该动作的作用下,能够转移到的所有的下一个状态的状态价值之和
将公式互相带入,可以得到迭代式
放两个图帮助理解

同样的,类似MRP里讲的,vπ(s)是有解析解的 ![]()
Bellman方程
Bellman方程用于求解马尔科夫决策过程(MDP)。 Bellman方程是一个递归方程,可以用动态规划求解,通过求解该方程可以找到最优值函数和最优策略。
其实上面已经将贝尔曼方程解释过了,他就是将优化问题迭代的变成了子问题,通过寻找下一阶段的子问题的最优解来解决这一个子问题的最优解。
最优值函数V*的求解公式如下:

对于每个MDP,总有至少一个策略优于或等于所有其他策略。如上图的公式,V(s) = f(V(s)),MDP一定有一个最优解,这个可以用不动点定理证明。
解方程:展开成矩阵的形式
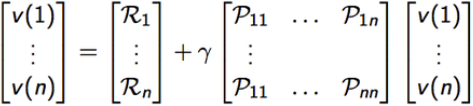
线性方程求解:
此解法为O(n3)的时间复杂度(为啥我也不知道),所以一般用一些逐步迭代的算法进行求解,如下:
- 动态规划Dynamic Programming
- 蒙特卡洛评估Monte-Carlo evaluation
- 时序差分学习Temporal-Difference

 浙公网安备 33010602011771号
浙公网安备 33010602011771号