计算机视觉课后作业4——多图拼接
一.实验内容:
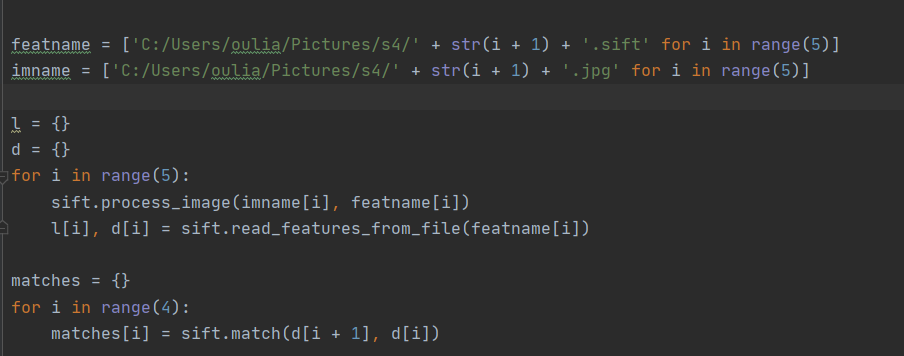
1.利用sift1算法和ransac算法实现全景图像拼接
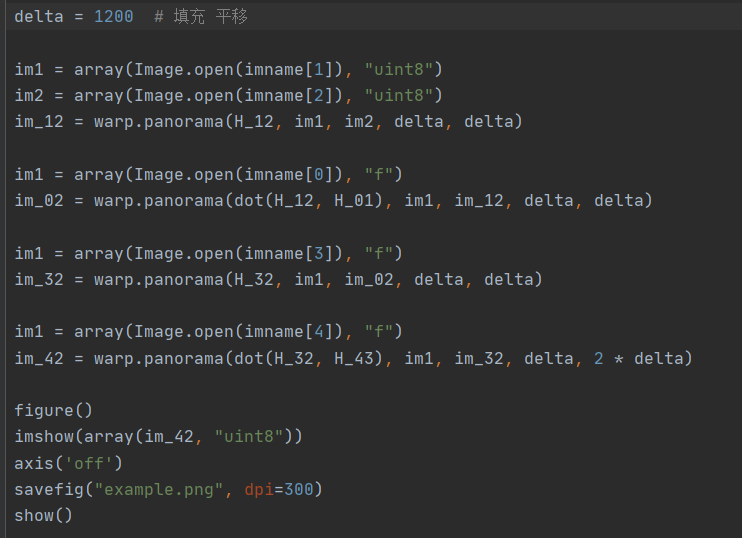
2.进一步做平面图像和景深面复杂图像的多图拼接
二.实验环境:pycharm
三.实验原理:
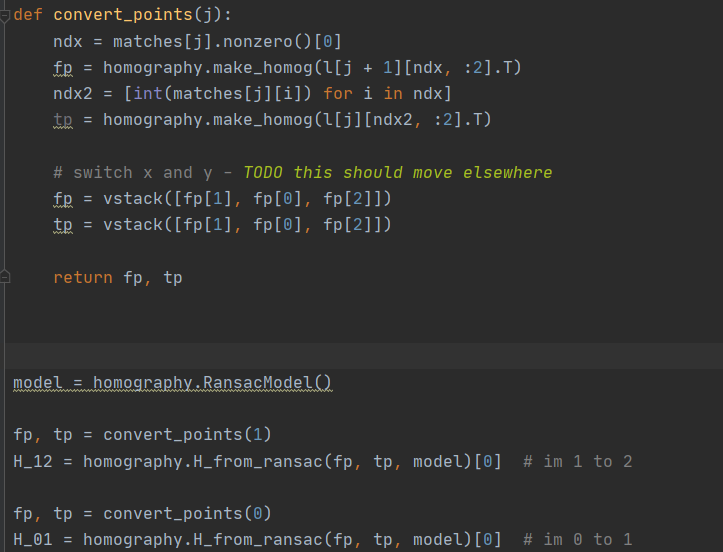
首先对于两张图片的简单拼接,只需找出两张图片中相似的至少四个点, 计算一张图片可以变换到另一张图片的单应性变换矩阵,用这个矩阵把那张图片变换后放到另一张图片相应的位置 ,就是相当于把两张图片中定好的四个相似的点重合在一起。得到的新图片就实现了简单的全景拼接。
而对于多图拼接,在两张图片拼接的基础上,对算法进行循环,进行两两拼接。
1.SIFT算法:
SIFT算法是用来提取图像局部特征的经典算法,SIFT算法的实质是在不同的尺度空间上查找关键点(特征点),并计算出关键点的方向。SIFT所查找到的关键点是一些十分突出,不会因光照,仿射变换和噪音等因素而变化的点,如角点、边缘点、暗区的亮点及亮区的暗点等。
用sift算法提取图像的特征点进行匹配,具体原理在实验二中已经论述。此处需要注意的问题是,sift算法特征匹配过程中可能出现错误的匹配信息,易产生位置估计失败的问题。因此,在实现全景图像拼接的时候,剔除这些错配点有很大的必要性。
2.RANSAC算法:
RANSAC算法是“RANdom SAmple Consensus(随机抽样一致)”的缩写。该方法是用来找到正确的模型来拟合带有噪声数据的迭代方法。它可以从一组包含“局外点”的观测数据集中,通过迭代方式估计数学模型的参数。其基本的思想是:数据中包含正确的点和噪声点,合理的模型应该能够在描述正确数据点的同时摒弃噪声点。
算法的基本假设是:
(1)数据由“局内点”组成,例如:数据的分布可以用一些模型参数来解释;
(2)“局外点”是不能适应该模型的数据;
(3)除此之外的数据属于噪声。
用RANSAC算法用一条直线来拟合直线:
RANSAC算法通过反复选择数据中的一组随机子集来达成目标。被选取的子集被假设为局内点,并用下述方法进行验证:
1.有一个模型适应于假设的局内点,即所有的未知参数都能从假设的局内点计算得出。
2.用1中得到的模型去测试所有的其它数据,如果某个点适用于估计的模型,认为它也是局内点。
3.如果有足够多的点被归类为假设的局内点,那么估计的模型就足够合理。
4.然后,用所有假设的局内点去重新估计模型,因为它仅仅被初始的假设局内点估计过。
5.最后,通过估计局内点与模型的错误率来评估模型。
这个过程被重复执行固定的次数,每次产生的模型要么因为局内点太少而被舍弃,要么因为比现有的模型更好而被选用。




 浙公网安备 33010602011771号
浙公网安备 33010602011771号