

最优化算法最速下降法、牛顿法、拟牛顿法 Python实现
---------------------------------------2020.9.23更新---------------------------------
把 BFGS(x)改写了一下,变简洁了
def BFGS(x): #拟牛顿法
epsilon, h, maxiter = 10**-5, 10**-5, 10**4
Bk = np.eye(x.size)
for iter1 in range(maxiter):
grad = num_grad(x, h)
if np.linalg.norm(grad) < epsilon:
return x
dk = -np.dot((np.linalg.inv(Bk)), grad)
ak = linesearch(x, dk)
x = x + dk*ak
yk = num_grad(x, h) -grad
sk = ak*dk
if np.dot(yk, sk) > 0:
Bs = np.dot(Bk,sk)
ys = np.dot(yk,sk)
sBs = np.dot(np.dot(sk,Bk),sk)
Bk = Bk - 1.0*Bs.reshape((n,1))*Bs/sBs + 1.0*yk.reshape((n,1))*yk/ys
return x
---------------------------------------2020.9.23更新---------------------------------
只用到了numpy这一个库,只要安装有这个库应该都可以直接运行
import numpy as np
def f(x): #目标函数
x1 = x[0]
x2 = x[1]
y = 100*((x2 - x1**2)**2) + (x1-1)**2
return y
def num_grad(x, h): #求梯度
df = np.zeros(x.size)
for i in range(x.size):
x1, x2 = x.copy(), x.copy() #这里需要用到复制,而不能用赋值号(=),原因是Python里面=号只是取别名,不是复制(c/c++里面是)
x1[i] = x[i] - h
x2[i] = x[i] + h
y1, y2 = f(x1), f(x2)
df[i] = (y2-y1)/(2*h)
return df
def num_hess(x, h): #求hess矩阵
hess = np.zeros((x.size, x.size))
for i in range(x.size):
x1 = x.copy()
x1[i] = x[i] - h
df1 = num_grad(x1, h)
x2 = x.copy()
x2[i] = x[i] + h
df2 = num_grad(x2, h)
d2f = (df2 - df1) / (2 * h)
hess[i] = d2f
return hess
def linesearch(x, dk): #求步长
ak = 1
for i in range(20):
newf, oldf = f(x + ak * dk), f(x)
if newf < oldf:
return ak
else:
ak = ak / 4 #迭代更新步长,步长可随意变换,保证newf比oldf小就可以了(如改为: ak=ak/2 也是可以的)
return ak
def steepest(x): #最速下降法
epsilon, h, maxiter = 10**-5, 10**-5, 10**4
for iter1 in range(maxiter):
grad = num_grad(x, h)
if np.linalg.norm(grad) < epsilon:
return x
dk = -grad
ak = linesearch(x, dk)
x = x + ak * dk
return x
def newTonFuction(x): #牛顿法
epsilon, h1, h2, maxiter = 10**-5, 10**-5, 10**-5, 10**4
for iter1 in range(maxiter):
grad = num_grad(x, h1)
if np.linalg.norm(grad) < epsilon:
return x
hess = num_hess(x, h2)
dk = -np.dot((np.linalg.inv(hess)), grad)
x = x + dk
return x
def BFGS(x): #拟牛顿法
epsilon, h, maxiter = 10**-5, 10**-5, 10**4
Bk = np.eye(x.size)
for iter1 in range(maxiter):
grad = num_grad(x, h)
if np.linalg.norm(grad) < epsilon:
return x
dk = -np.dot((np.linalg.inv(Bk)), grad)
ak = linesearch(x, dk)
x = x + dk*ak
yk = num_grad(x, h) -grad
sk = ak*dk
if np.dot(yk.reshape(1, grad.shape[0]), sk) > 0:
'''第一种分步计算实现
t0 = np.dot(Bk, sk)
t1 = np.dot(t0.reshape(sk.shape[0], 1), sk.reshape(1, sk.shape[0]))
temp0 = np.dot(t1, Bk)
temp1 = np.dot(np.dot(sk.reshape(1, sk.shape[0]), Bk), sk)
tmp0 = np.dot(yk.reshape(yk.shape[0], 1), yk.reshape(1, yk.shape[0]))
tmp1 = np.dot(yk.reshape(1, yk.shape[0]), sk)
Bk = Bk - temp0 / temp1 + tmp0 / tmp1
'''
#第二种直接写公式实现
Bk = Bk - np.dot(np.dot(np.dot(Bk, sk).reshape(sk.shape[0], 1), sk.reshape(1, sk.shape[0])), Bk)/np.dot(np.dot(sk.reshape(1, sk.shape[0]), Bk), sk) + np.dot(yk.reshape(yk.shape[0], 1), yk.reshape(1, yk.shape[0])) / np.dot(yk.reshape(1, yk.shape[0]), sk)
return x
#x0 = np.array([0.999960983973235, 0.999921911551354]) #初始解
x0 = np.array([0.7, 0.9]) #初始解
x = steepest(x0) #调用最速下降法
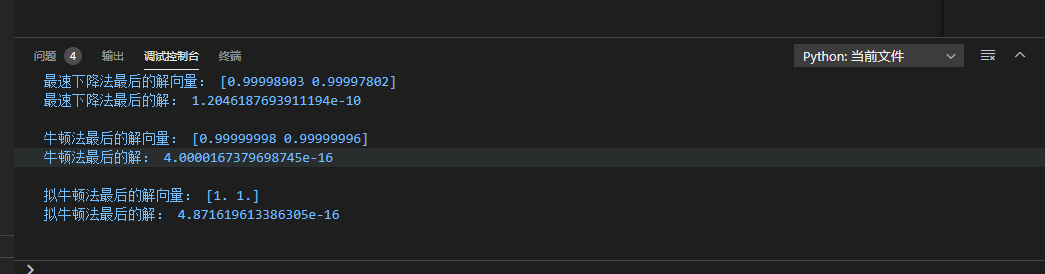
print("最速下降法最后的解向量:",x)
print("最速下降法最后的解:",f(x))
print('')
x = newTonFuction(x0) #调用牛顿法
print("牛顿法最后的解向量:", x)
print("牛顿法最后的解:", f(x))
print('')
x = BFGS(x0) #调用拟牛顿法
print("拟牛顿法最后的解向量:", x)
print("拟牛顿法最后的解:", f(x))
print('')
结果如下
拟牛顿法感觉弄麻烦了,暂时也没想法改,先就这样吧

