常用的数据结构及对应算法
一:常见的数据结构及算法
1.线性表及其算法
1.1 线性表
线性表是最基本、最简单、也是最常用的一种数据结构。线性表(linear list)是数据结构的一种,一个线性表是n个具有相同特性的数据元素的有限序列。线性表中数据元素之间的关系是一对一的关系,即除了第一个和最后一个数据元素之外,其它数据元素都是首尾相接的
1.2 线性表的常见算法
删掉线性表中的相同元素,并且按升序排列
LinkList DeleteSameElem(LinkList &L){ LNode *pre=L; LNode *p=L->next; LNode *s=L; while(p!=NULL){ if(pre->data==p->data) { s=p; pre->next=p->next; p=p->next; free(s);//释放相同结点空间 } else{ p=p->next;//不相等时,后移 pre=pre->next; } } return L;
}
2.栈及其算法
2.1 栈
栈(stack)又名堆栈,它是一种运算受限的线性表。限定仅在表尾进行插入和删除操作的线性表。这一端被称为栈顶,相对地,把另一端称为栈底。向一个栈插入新元素又称作进栈、入栈或压栈,它是把新元素放到栈顶元素的上面,使之成为新的栈顶元素;从一个栈删除元素又称作出栈或退栈,它是把栈顶元素删除掉,使其相邻的元素成为新的栈顶元素。
2.2 栈的常见算法
2.2.1 入栈
void PushStack(char x) //入栈 { LinkStack *top; top = (LinkStack *)malloc(sizeof(LinkStack)); top->data = x; top->next = L; L = top; }
2.2.2 出栈
char PopStack() { char x; if(L->next == NULL) { printf("空栈\n"); exit(1); } else { LinkStack *top; x = L->data; top = L; L = top->next; free(top); return x; } }
3.队列及其算法
3.1 队列
队列是一种特殊的线性表,特殊之处在于它只允许在表的前端(front)进行删除操作,而在表的后端(rear)进行插入操作,和栈一样,队列是一种操作受限制的线性表。进行插入操作的端称为队尾,进行删除操作的端称为队头。
3.2 队列的常见算法
4.树和二叉树及其算法
4.1 树和二叉树
4.1.1 树
树是一种数据结构,它是由n(n>=1)个有限节点组成一个具有层次关系的集合。
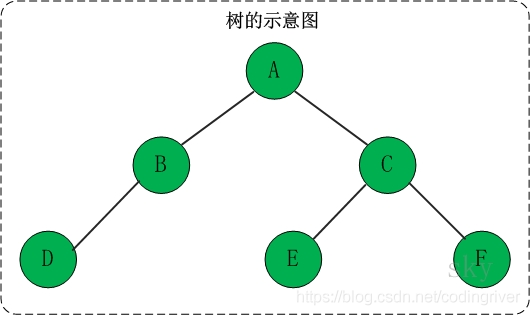
4.1.2 二叉树
二叉树是每个节点最多有两个子树的树结构。它有五种基本形态:二叉树可以是空集;根可以有空的左子树或右子树;或者左、右子树皆为空。
4.2 二叉树的常见算法
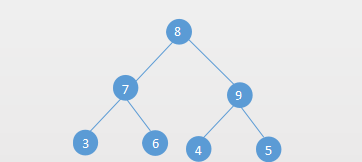
前序遍历:前序遍历首先访问根结点然后遍历左子树,最后遍历右子树。在遍历左、右子树时,仍然先访问根节点,然后遍历左子树,最后遍历右子树。
如,下图所示二叉树的遍历结果是:ABDECF

代码实现:
private void preorder(Node<T> node) { if (node == null) { return; } System.out.println(node.value); preorder(node.left); preorder(node.right); }
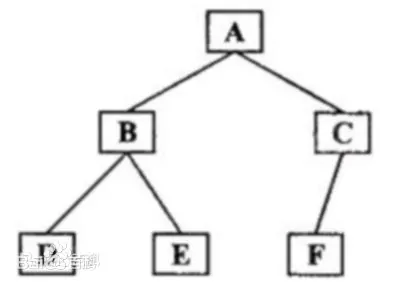
中序遍历:中序遍历首先遍历左子树,然后访问根结点,最后遍历右子树。若二叉树为空则结束返回,否则
如,下图所示二叉树的遍历结果是:DBEAFC
private void inorder(Node<T> node) { if (node == null) { return; } inorder(node.left); System.out.println(node.value); inorder(node.right); }
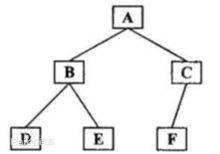
后序遍历:后序遍历(LRD)是二叉树遍历的一种,也叫做后根遍历、后序周游,可记做左右根。后序遍历有递归和非递归算法两种。在二叉树中,先左后右再根,即首先遍历左子树,然后遍历右子树,最后访 问根结点。
如,下图所示二叉树的遍历结果是:DEBFCA
代码实现:
private void postorder(Node<T> node) { if (node == null) { return; } postorder(node.left); postorder(node.right); System.out.println(node.value); }
5.图及其算法
5.1 图
在计算机科学中,一个图就是一些顶点的集合,这些顶点通过一系列边结对(连接)。顶点用圆圈表示,边就是这些圆圈之间的连线。顶点之间通过边连接。
5.1.1 图的分类
①无向图: 如果图中任意两个顶点之间的边都是无向边(简而言之就是没有方向的边),则称该图为无向图(Undirected graphs)
②有向图:一个有向图D是指一个有序三元组(V(D),A(D),ψD),其中ψD)为关联函数,它使A(D)中的每一个元素(称为有向边或弧)对应于V(D)中的一个有序元素(称为顶点或点)对
③完全图:无向完全图:在无向图中,如果任意两个顶点之间都存在边,则称该图为无向完全图。
④连通图:任何两个节点之前都是连通的,都存在一条路径,并且图中没有方向。
⑥简单图:在图中,若不存在顶点到其自身的边,且同一条边不重复出现,则称这样的图为简单图。
5.2 图及其常见算法
5.2.1 BFS(广度优先搜索)
定义:广度优先搜索是最简便的图的搜索算法之一,这一算法也是很多重要的图的算法的原型。Dijkstra单源最短路径算法和Prim最小生成树算法都采用了和宽度优先搜索类似的想。其别名又叫BFS,属于一 种盲目搜寻法,目的是系统地展开并检查图中的所有节点,以找寻结果。换句话说,它并不考虑结果的可能位置,彻底地搜索整张图,直到找到结果为止。
代码实现:
void BFS (GRAPH *G , NODE *s) { int i; NODEQUEUE Q; init_queue (&Q , G); NODE *temp; PTR_NODE *ptr_temp; for (i = 0 ; i < G->length ; i++) { if (arr_V[i] != s) { arr_V[i]->color = WHITE; arr_V[i]->d = INFINITE; arr_V[i]->parent = NULL; } } s->color = GRAY; s->parent = NULL; s->d = 0; enqueue (&Q , s); while (Q.count != 0) { temp = dequeue (&Q); ptr_temp = G->adj[temp->key]; while (ptr_temp != NULL) { if (ptr_temp->ptr->color == WHITE) { ptr_temp->ptr->color = GRAY; ptr_temp->ptr->d = temp->d + 1; ptr_temp->ptr->parent = temp; enqueue (&Q , ptr_temp->ptr); } ptr_temp = ptr_temp->next; } temp->color = BLACK; }
5.2.2 DFS (深度优先搜索)
定义:深度优先搜索是一种在开发爬虫早期使用较多的方法。它的目的是要达到被搜索结构的叶结点 。在一个HTML文件中,当一个超链被选择后,被链接的HTML文件将执行深度优先搜索,即在搜索其余的 超链结果之前必须先完整地搜索单独的一条链。深度优先搜索沿着HTML文件上的超链走到不能再深入为止,然后返回到某一个HTML文件,再继续选择该HTML文件中的其他超链。当不再有其他超链可 选择时,说明搜索已经结束。
代码实现:
void DFS(ALGraph * alGraph,int v) { int w; ArcNode * vexNode; visited[v] = 1; printf("[%d] -> ",v); vexNode = alGraph->vertices[v].firstarc; while(vexNode != NULL) { w = vexNode->adjvex; if(visited[w]==0) DFS(alGraph,w); vexNode = vexNode->nextarc; } }

 浙公网安备 33010602011771号
浙公网安备 33010602011771号