
ROS中测试机器人里程计信息
在移动机器人建图和导航过程中,提供相对准确的里程计信息非常关键,是后续很多工作的基础,因此需要对其进行测试保证没有严重的错误或偏差。实际中最可能发生错误的地方在于机器人运动学公式有误,或者正负号不对,或者定义的坐标系之间方向不一致等。
整个移动机器人的控制结构如下图所示,其中base_controller节点将订阅的cmd_vel信息通过串口或其它通信接口发送给下位机(嵌入式控制板)。下位机中根据机器人运动学公式进行解算,将机器人速度转换为每个轮子的速度,然后通过CAN总线(或其它总线接口)将每个轮子的转速发送给电机驱动板控制电机转动。电机驱动板对电机转速进行闭环控制(PID控制),并统计单位时间内接收到的编码器脉冲数,计算出轮子转速。
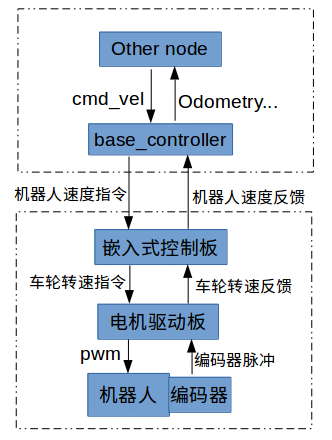
base_controller节点将接收到的cmd_vel速度信息转换为自定义的结构体或union类型的数据(自定义的数据类型中可以包含校验码等其它信息),并通过串口发送控制速度信息(speed_buf)或读取机器人传回的速度信息 (speed_buf_rev)。base_controller节点正确读取到底层(比如嵌入式控制板)传回的速度后进行积分,计算出机器人的估计位置和姿态,并将里程计信息和tf变换发布出去。下面的代码只是一个例子,需要完善自定义的数据结构和校验函数:



#include <iostream> // C++标准库头文件 #include <iomanip> #include <math.h> #include <boost/asio.hpp> // boost库头文件 #include <boost/bind.hpp> #include <ros/ros.h> // ros头文件 #include <std_msgs/String.h> #include <nav_msgs/Odometry.h> #include <geometry_msgs/Quaternion.h> #include <geometry_msgs/PoseStamped.h> #include <geometry_msgs/PolygonStamped.h> #include <geometry_msgs/Polygon.h> #include <geometry_msgs/Point32.h> #include <tf/tf.h> #include <tf/transform_broadcaster.h> using namespace std; using namespace boost::asio; /********************************回调函数***************************************/ void cmd_velCallback(const geometry_msgs::Twist &twist_aux) { // 在回调函数中将接收到的cmd_vel速度消息转换为自定义的结构体(或者union)类型的数据 speed_buf.vx = twist_aux.linear.x; speed_buf.vy = twist_aux.linear.y; speed_buf.vth = twist_aux.angular.z; } double x = 0.0; // 初始位置x的坐标 double y = 0.0; // 初始位置y的坐标 double th = 0.0; // 初始位置的角度 double vx = 0.0; // x方向的初始速度 double vy = 0.0; // y方向的初始速度 double vth = 0.0; // 初始角速度 double dt = 0.0; // 积分时间 int main(int argc, char** argv) { /****************************** 配置串口 ***********************************/ io_service iosev; serial_port sp(iosev, "/dev/ttyUSB0"); // 设置串口名称 sp.set_option(serial_port::baud_rate(115200)); // 设置波特率 sp.set_option(serial_port::flow_control(serial_port::flow_control::none)); // 设置控制方式 sp.set_option(serial_port::parity(serial_port::parity::none)); // 设置奇偶校验 sp.set_option(serial_port::stop_bits(serial_port::stop_bits::one)); // 设置停止位 sp.set_option(serial_port::character_size(8)); // 设置字母位数为8位 ros::init(argc, argv, "base_controller"); // 初始化node节点 ros::NodeHandle n; ros::Subscriber cmd_vel_sub = n.subscribe("cmd_vel", 100, cmd_velCallback); // 订阅cmd_vel topic ros::Publisher odom_pub = n.advertise<nav_msgs::Odometry>("odom", 10); // 发布odom topic tf::TransformBroadcaster odom_broadcaster; // 发布base_link --> odom的tf变换 ros::Publisher poly_pub = n.advertise<geometry_msgs::PolygonStamped>("polygon",10); // 发布PolygonStamped信息,rviz中显示机器人边界 ros::Time current_time, last_time; current_time = ros::Time::now(); last_time = ros::Time::now(); while(ros::ok()) { current_time = ros::Time::now(); read(sp, buffer(speed_buf_rev)); // 从串口读取机器人速度数据 if(CRC_verify(speed_buf_rev)) // 对接收到的数据进行校验 { vx = speed_buf_rev.vx; vy = speed_buf_rev.vy; vth = speed_buf_rev.vth; // 打印接收到的机器人速度信息 ROS_INFO("vx is %2f", vx); ROS_INFO("vy is %2f", vy); ROS_INFO("vth is %2f", vth); /**compute odometry in a typical way given the velocities of the robot**/ double dt = (current_time - last_time).toSec(); double delta_x = (vx * cos(th) - vy * sin(th)) * dt; double delta_y = (vx * sin(th) + vy * cos(th)) * dt; double delta_th = vth * dt; x += delta_x; y += delta_y; th += delta_th; /***********first, we'll publish the transform over tf*************/ geometry_msgs::TransformStamped odom_trans; odom_trans.header.stamp = current_time; odom_trans.header.frame_id = "odom"; odom_trans.child_frame_id = "base_link"; odom_trans.transform.translation.x = x; odom_trans.transform.translation.y = y; odom_trans.transform.translation.z = 0.0; odom_trans.transform.rotation = tf::createQuaternionMsgFromYaw(th); // send the transform odom_broadcaster.sendTransform(odom_trans); /*********next, we'll publish the odometry message over ROS*******/ nav_msgs::Odometry odom; odom.header.stamp = current_time; odom.header.frame_id = "odom"; odom.child_frame_id = "base_link"; // since all odometry is 6DOF we'll need a quaternion created from yaw geometry_msgs::Quaternion odom_quat = tf::createQuaternionMsgFromRollPitchYaw(0,0,th); //set the position odom.pose.pose.position.x = x; odom.pose.pose.position.y = y; odom.pose.pose.position.z = 0.0; odom.pose.pose.orientation = odom_quat; // set the velocity odom.twist.twist.linear.x = vx; odom.twist.twist.linear.y = vy; odom.twist.twist.angular.z = vth; odom_pub.publish(odom); /*******************publish polygon message***********************/ geometry_msgs::Point32 point[4]; // coordinates described in base_link frame point[0].x = -0.39; point[0].y = -0.31; point[1].x = 0.39; point[1].y = -0.31; point[2].x = 0.39; point[2].y = 0.31; point[3].x = -0.39; point[3].y = 0.31; geometry_msgs::PolygonStamped poly; poly.header.stamp = current_time; poly.header.frame_id = "base_link"; // 多边形相对于base_link来描述 poly.polygon.points.push_back(point[0]); poly.polygon.points.push_back(point[1]); poly.polygon.points.push_back(point[2]); poly.polygon.points.push_back(point[3]); poly_pub.publish(poly); } else ROS_INFO("Serial port communication failed!"); write(sp, buffer(speed_buf, buffer_length)); // 速度控制信息写入串口 last_time = current_time; ros::spinOnce(); } // end-while iosev.run(); }
teleop_joy节点订阅手柄发布的joy消息,并将该消息转换为机器人速度:
#include <ros/ros.h> #include <geometry_msgs/Twist.h> #include <sensor_msgs/Joy.h> class Teleop { public: Teleop(); private: void joyCallback(const sensor_msgs::Joy::ConstPtr& joy); ros::NodeHandle nh_; int linear_, angular_,transverse_; // 手柄上的轴号(分别表示用哪个轴控制前后移动、旋转以及横向运动) double l_scale_, a_scale_, t_scale_; // 速度比例系数 ros::Publisher vel_pub_; ros::Subscriber joy_sub_; }; Teleop::Teleop():linear_(1),angular_(0),transverse_(2) { // param()函数从参数服务器取参数值给变量。如果无法获取,则将默认值赋给变量 nh_.param("axis_linear", linear_, linear_); nh_.param("axis_angular", angular_, angular_); nh_.param("axis_transverse", transverse_, transverse_); nh_.param("scale_angular", a_scale_, a_scale_); nh_.param("scale_linear", l_scale_, l_scale_); nh_.param("scale_transverse", t_scale_, t_scale_); vel_pub_ = nh_.advertise<geometry_msgs::Twist>("cmd_vel", 1); joy_sub_ = nh_.subscribe<sensor_msgs::Joy>("joy", 10, &Teleop::joyCallback, this); } void Teleop::joyCallback(const sensor_msgs::Joy::ConstPtr& joy) { geometry_msgs::Twist twist; // 发布的机器人速度等于joy数据乘以速度比例系数 // 比如手柄X轴向前推到最大时为1.0,速度比例系数为0.4,则机器人最大前进速度为0.4m/s twist.linear.x = l_scale_*joy->axes[linear_]; twist.linear.y = t_scale_*joy->axes[transverse_]; twist.angular.z = a_scale_*joy->axes[angular_]; vel_pub_.publish(twist); // 发布机器人速度信息 } int main(int argc, char** argv) { ros::init(argc, argv, "teleop_joy"); Teleop teleop_turtle; ros::spin(); }
为了方便测试,将相关节点写到teleop_control.launch文件中,启动后分别打开base_controller、joy、teleop_joy、rviz这四个节点。注意之前teleop_joy程序中用param()函数获取参数并赋值给程序中的变量,这样就可以将配置参数写在launch文件中,想要改变程序中某些变量的值时直接修改launch文件就行,不用再编译一遍源程序,调试和使用时会很方便。
<launch> <!-- Start the base_controller node --> <node pkg="slam" type="base_controller" name="base_controller" /> <!-- Start IMU message publish node --> <!-- <node pkg="imu" type="imu" name="imu" /> --> <!--Import robot_pose_ekf file into the current file --> <!-- <include file="$(find slam)/launch/robot_pose_ekf.launch" /> --> <!-- Start joy node: publish joystick message --> <node pkg="joy" type="joy_node" name="turtle_joy" respawn="true" output="screen"> <param name="dev" type="string" value="/dev/input/js0" /> <!-- Defult device name --> <param name="deadzone" value="0.12" /> </node> <!-- Axes configuration--> <param name="axis_linear" value="1" type="int" /> <!-- Axes for forward and backword movement --> <param name="axis_angular" value="0" type="int" /> <!-- Axes for counterclockwise and clockwise rotation --> <param name="axis_transverse" value="2" type="int" /> <!-- Axes for left and right movement--> <param name="scale_linear" value="0.4" type="double" /> <!-- maximum vx is 0.4m/s --> <param name="scale_angular" value="-0.3" type="double" /> <!-- maximum angular velocity is 0.3rad/s --> <param name="scale_transverse" value="0.3" type="double" /> <!-- maximum vy is 0.3m/s --> <!-- Start teleop_joy node to control the robot by joystick--> <node pkg="slam" type="teleop_joy" name="teleop_joy" /> <!-- visualization --> <node pkg="rviz" type="rviz" name="rviz" args="-d $(find slam)/rviz/teleop.rviz" /> </launch>
实际测试时,机器人的移动距离和转动角度都要进行测试(要确保机器人的实际运动方向与发送的速度指令方向一致,并且偏差在正常范围内),如果测试与预期情况不一样则需要查找原因。另外由于轮子打滑、以及各种误差的影响,对速度积分进行航迹推算得到的里程计累积误差会越来越大。实际测试时rviz中的Odometry信息(红色箭头)以及机器人边界(蓝色矩形)如下图所示。机器人从一个固定参考位置开始运动,主要是前进后退以及横向移动,最终回到起始位置。可以发现误差还算比较小:
下面用手柄控制机器人走了更远的距离,并且运动过程中旋转较多(出现了打滑的情况),最终回到初始位置时Odometry的位置和角度偏差较大:
单独使用里程计来估计小车位置姿态的效果不是特别好,因为轮子打滑等情况在实际中很难避免。因此可以考虑使用IMU或其它传感器来同时进行测量,使用robot_pose_ekf(扩展卡尔曼滤波)对imu和里程计的数据进行融合,可以得到更准确的机器人位姿信息。注意在使用robot_pose_ekf时base_controller程序中就不应再发送base_link和odom之间的tf变换了,因为robot_pose_ekf会发布相应的变换。
下图就是实际测试的情况,其中黄色箭头为多传感器信息融合后得到的里程计信息(odom_combined),红色为单独使用编码器计算的里程计信息(odom)。机器人从一个固定参考位置出发,转一圈之后回到起始位置,融合后的位姿信息更准一点。

在测试时,某些情况下需要给机器人发送一个恒定的速度,用手柄比较难做到,可以在命令行中使用rostopic pub向指定的话题上发布数据:
rostopic pub <topic-name> <topic-type> [data...]
使用rostopic pub发布消息时有3种模式:
1. 锁存模式Latching mode:rostopic will publish a message to /topic_name and keep it latched -- any new subscribers that come online after you start rostopic will hear this message. You can stop this at any time by pressing ctrl-C.
2. 单次模式Once mode:If you don't want to have to stop rostopic with ctrl-C, you can publish in once mode. rostopic will keep the message latched for 3 seconds, then quit.
3. 循环模式Rate mode:In rate mode, rostopic will publish your message at a specific rate. For example, -r 10 will publish at 10hz. For file and piped input, this defaults to 10hz.
三种模式在命令行中对应的选项为:
1. -l, --latch:Enable latch mode. Latching mode is the default when using command-line arguments.
2. -r RATE:Enable rate mode. Rate mode is the default (10hz) when using piped or file input.
3. -1, --once:Enable once mode.
比如让机器人以0.5m/s的速度前进,可以输入下面的指令(如果需要循环发送控制指令机器人才能运动,可以将命令中的-1改为-r 10,即每秒发送10次速度指令):
$ rostopic pub -1 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.5, y: 0.0, z: 0.0}, angular: {x: 0.0,y: 0.0,z: 0.0}}'
参考:



【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· AI与.NET技术实操系列:向量存储与相似性搜索在 .NET 中的实现
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)
· winform 绘制太阳,地球,月球 运作规律
2016-12-28 目标运动模型