周期同步位置模式(CSP),轮廓位置模式(PPM),位置模式(PM)
什么是运动控制?
运动控制就是通过机械传动装置对运动部件的位置、速度进行实时的控制管理,使运动部件按照预期的轨迹和规定的运动参数(如速度、加速度参数等)完成相应的动作。
运动控制系统的典型构成
1. 开环系统(电机:步进电机;驱动器:脉冲分配,电流放大)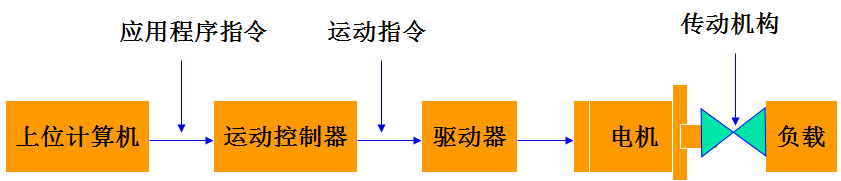
2. 半闭环系统(电机:直流伺服电机、交流伺服电机;驱动器:电流放大,位置反馈控制)

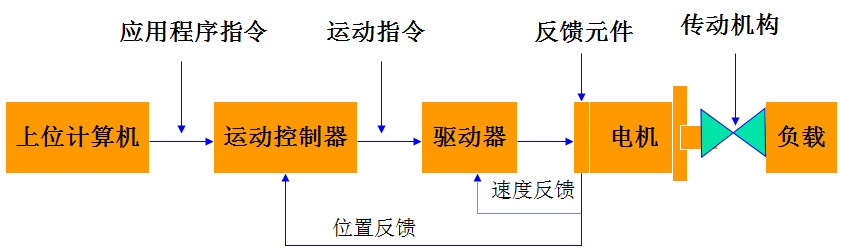
3. 半闭环系统(直流伺服电机、交流伺服电机;驱动器:速度反馈控制,电流放大;运动控制器:运动规划,速度指令,位置反馈取自电机轴)
4. 全闭环系统(驱动器:速度反馈控制,电流放大;运动控制器:运动规划,速度指令,位置反馈取自负载)
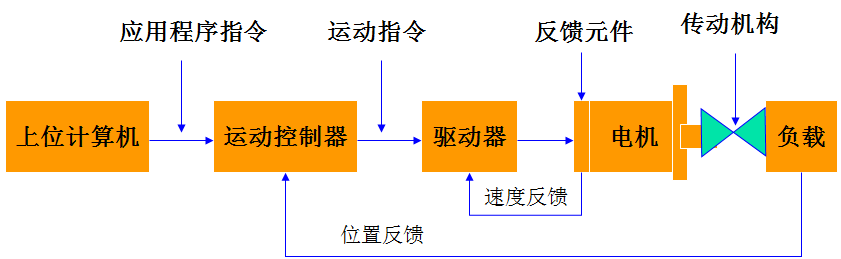
全闭环伺服系统可以消除机械传动带来的误差,而半闭环系统只能补偿部分误差,因此,半闭环伺服系统的精度比全闭环伺服系统的精度要低一些。由于采用了位置检测装置,所以全闭环系统的位置精度在其他因素确定了之后,主要取决于检测装置的分辨率和精度。
注意半闭环系统2与3的区别。驱动器如果工作在位置模式,运动控制器(运动控制卡、PLC...)就只做位置轨迹的规划(Trajectory generator),每个通信周期发送目标位置到驱动器。驱动器接收到设定位置后,与当前位置比较,并依据控制器-驱动器通信周期与驱动器位置环周期进行线性或者非线性插值,将插值作为每个位置环周期的“设定位置”。
举个例子,假设驱动器位置环周期是125us,控制器和驱动器通信周期为 2ms,当前位置为 0,目标位置为 1mm,那么接下来 16 个周期驱动器位置环的“设定位置”就依次为:0.0625mm,0.125mm, 0.1875mm, 0.25mm,……1mm. 如果没有插值,那么接下来驱动器的第 1 个周期的设定位置就是 1mm,驱动器在第 125us时,位置为 1mm,在 2-16 个周期,设定位置维持不变,相当于电机停止,直到第 2ms,接收到新的“给定位置”。由于间隔仅为 2ms,电机并不会真的停止,而是表现为顿挫感,转动不流畅,不连贯。
驱动器如果工作在速度模式,那么控制器就不仅做位置曲线的规划,还要完成位置环的调节。此时NC周期与位置环周期相等,不必插值。伺服驱动器的位置环被忽略,其速度环直接接受上层给出的“设定速度。
驱动器工作模式(Modes of operation)
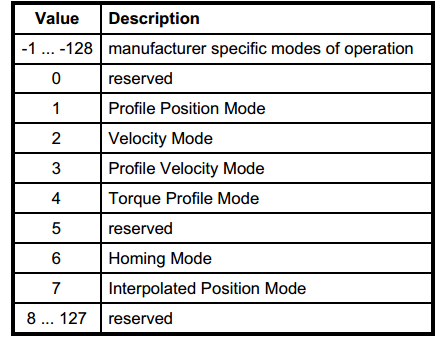
CANopen DSP 402协议中对象字典6060h 处定义了驱动器的工作模式:
不同的驱动器支持的工作模式有所不同。比如下图左边是MAXON的EPOS2驱动器支持的模式,右边是MAXPOS驱动器支持的工作模式(可以看出它们都遵循了CANopen 402标准):

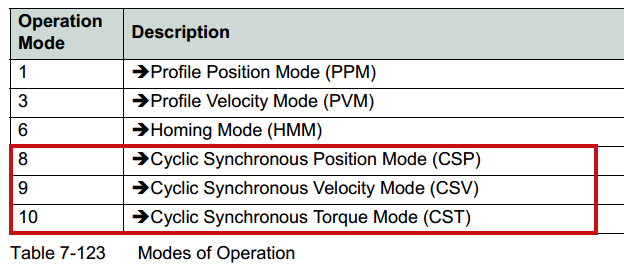
从上面的这些表中可以看出关于位置控制主要有三种模式:周期同步位置模式(CSP),轮廓位置模式(PPM),位置模式(PM)。
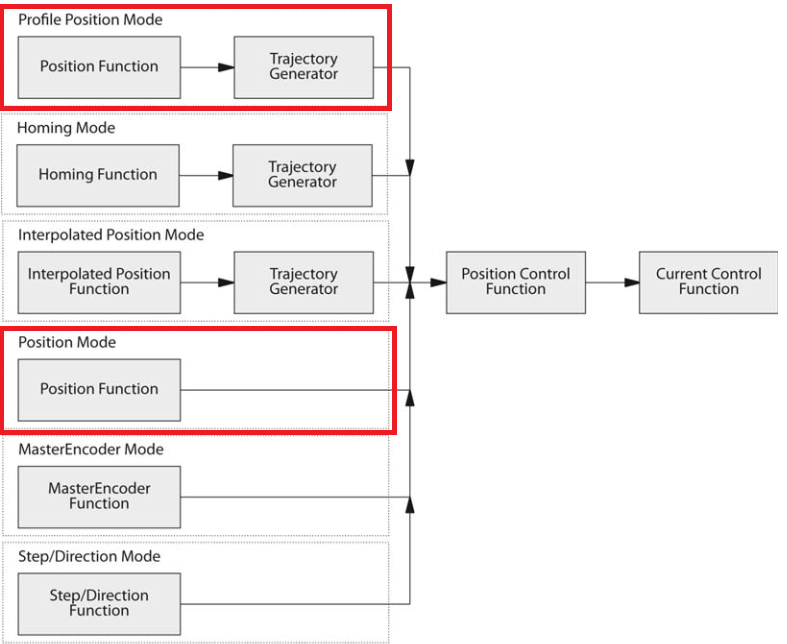
1. 轮廓位置模式(Profile Position Mode)
Speed, position and acceleration can be limited, profiled moves using a Trajectory Generator can be executed. The trajectory generator supplies the control loop(s) with the demand values.

轮廓位置模式下,驱动器接收主站发送来的目标位置指令,在驱动器内部根据速度、加速度规划参数设置进行轨迹规划。例如:应用程序要求伺服轴以设定的速度、加速度运动到某个目标位置,驱动器接到这个指令后,在内部的轨迹生成器中计算出每个NC周期(比如:1ms)伺服轴应该到达的位置,然后发送给位置环去执行。

2. 位置模式(Position Mode)
Position demand value can be set directly. The Position Mode allows positioning without profile, i.e. the target position is set immediately as a new set value for the position control loop. The Position Mode is a useful operating mode for a situation wherethe axis acts as a slave axis commanded by progressive positions set values without large jumps. Hence, the path generator is not needed. An example for a progressive set value is an analog set value voltage.
Special operating modes without path generation are Master Encoder Mode where the slave axis follows the signal pulses from an external encoder (e.g. that of a master axis) or Step Direction Mode, where each pulse command from a stepper motor drive corresponds to a small rotating angle. Alternative operating modes allow running the motion controller without receiving on-line commands. Instead, analog voltage signals or signal pulses are used as command values. These incoming signals are converted to set values that are directly fed into the corresponding control loop without a profile or trajectory being generated.
3. 周期同步位置模式(Cyclic synchronous position mode) ,与轮廓位置模式(Profile Position Mode )不同,其轨迹发生器位于控制器端,而非驱动器内。在该模式下,控制器只需要周期性的下发目标位置即可(与位置插补模式的原理相类似),而且可以设置附加的速度前馈(Velocity offset)或转矩前馈(Torque offset):
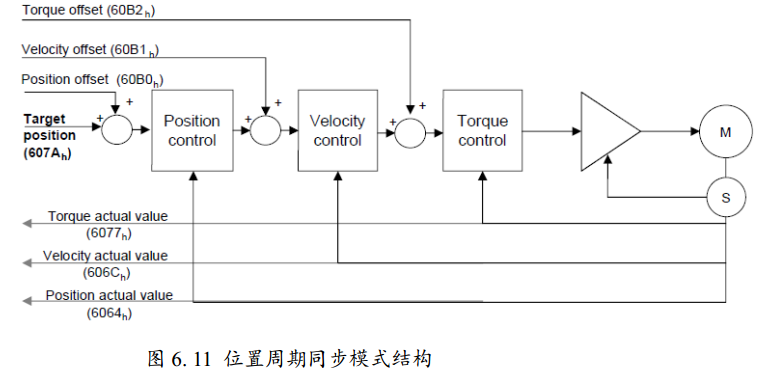
即轮廓位置模式的Trajectory Generator在驱动器内,周期同步位置模式的Trajectory Generator在控制器内,而位置模式(Position Mode)、电子手轮模式(Master Encoder Mode)、脉冲/方向模式(Step Direction Mode)则不需要轨迹生成器。
参考:
The Position-based Type II On-Line Trajectory Generation Algorithm
V-rep学习笔记:Reflexxes Motion Library 1

 浙公网安备 33010602011771号
浙公网安备 33010602011771号